
Fターム[2F069NN25]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 統計処理 (156)
Fターム[2F069NN25]の下位に属するFターム
平均値を求めるもの (97)
Fターム[2F069NN25]に分類される特許
1 - 20 / 59
路面凹凸評価システム
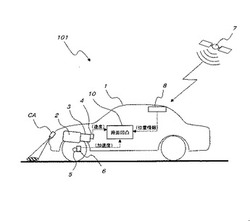
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
複数の姿勢においてプローブを用いて物体をプロービングすることによってプローブを物体とレジストレーションする方法およびシステム

【課題】複数の姿勢においてプローブを用いて物体をプロービングすることによって、プローブが物体とレジストレーションされる方法を提供する。
【解決手段】プローブ110の各姿勢は、ロケーションおよび向きを含む。プローブ110の現在のロケーションの確率分布が、粒子のセットによって表され201、プローブ110の現在の向きの確率分布が、各粒子について、現在のロケーションを条件とするガウス分布によって表される。候補動作のセットが選ばれ215、各候補動作について、粒子のセットに基づく期待不確実性が求められる220。最小の期待不確実性を有する候補動作が、プローブ110の次の動作として選択され230、プローブ110は、次の動作に従って移動され202、粒子のセットは、プローブ110の次の姿勢を用いて更新される210。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
R形状計測装置、R形状計測方法及びR形状計測プログラム
【課題】R1,000以上、特にR10,000以上の大径を有する被測定物のR形状を高精度に計測することができ、かつ、持ち運びができるようなR形状計測装置並びにR形状計測方法及びR形状計測プログラムを提供する。
【解決手段】被測定物上の少なくとも3点における座標値を測定する手段と、測定された前記座標値に基づいて、R形状の中心値(a,b)及び半径Rを、A=−2a、B=−2b、C=a2+b2−R2と置換した場合に、該A、B及びCのそれぞれを変数として、円の一般式の残差平方和を示す式を偏微分してなる連立方程式から取得するR形状算出手段と、を含む。
(もっと読む)
車輪径を調整する方法及び装置
【課題】
車輪径を調整するための方法及び装置を提供する。
【解決手段】
本方法は、現車輪径分布ベクトルを入手するステップと、前記現車輪径分布ベクトルの潜在的磨耗率を決定するために前記現車輪径分布ベクトルと既知車輪径分布ベクトル・クラスタとの間の類似性スコアを計算するステップと、候補目標車輪径分布ベクトルの潜在的磨耗率を決定するために前記候補目標車輪径分布ベクトルと前記既知車輪径分布ベクトル・クラスタとの間の類似性スコアを計算するステップと、前記現車輪径分布ベクトルを目標車輪径分布ベクトルに切り替えることによって得られる潜在的磨耗率の減少が所定の条件に適合するように前記候補目標車輪径分布ベクトルから前記目標車輪径分布ベクトルを選択するステップとを含む。本発明の解決方法により、車輪径分布ベクトルの変更を通して、将来の潜在的磨耗率及び列車の保守整備時に必要な研削の量を最適化することができる。
(もっと読む)
物体に対するプローブの姿勢を、該プローブを用いて該物体をプロービングすることによって求めるための方法およびシステム
【課題】物体に対するプローブの姿勢を、プローブを用いて物体をプロービングすることによって求めるためのシステム及び方法を提供する。
【解決手段】ラオ・ブラックウェル化パーティクルフィルタリングを使用して姿勢の確率を求めるステップであって、姿勢のロケーションの確率が前記パーティクルのロケーション212によって表され、姿勢の配向の確率が、各パーティクルのロケーションを条件とするパーティクルの配向にわたるガウス分布215によって表され、姿勢の確率が特定の姿勢の周りに集中するまで、後続のプロービングごとに実行されるステップと、特定の姿勢に基づいて物体に対するプローブの姿勢を推定するステップとを含む。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップ100と、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
標識検定装置
【課題】標識検出器と組み合わせて用いられる標識の、検出原理上の回転対称性の程度を評価するための標識検定装置を、提供する。
【解決手段】標識検定装置は、装着部により検定対象の標識を回転軸部材に装着して、駆動部によって回転軸部材に所定の周期運動を与えた場合に、標識検出器から得られた標識の検出データを、処理部に入力し、処理部のデータ処理によって標識の検出原理上の軸対称性の指標データを検定データとして得る。
(もっと読む)
誤差伝播による出力データの精度評価方法
【課題】出力データの精度評価を、理論的で、簡単な計算で行え、計算量が少なく、収束計算を行う必要が無く、データ処理を行う多くのソフトウェアに適用可能であり、誤差の要因の分析、要因毎の大きさの比較等の多くの解析が可能となるようにする。
【解決手段】データ処理を入力データによって数値微分することで、データ処理のヤコビ行列Jを求める手順(ステップ110)と、入力データの持つ誤差の分散共分散を推定して、入力データの誤差行列Dを求める手順(ステップ120)と、前記ヤコビ行列J及び入力データの誤差行列Dより、出力データの持つ誤差の分散共分散を表す誤差行列Rを計算する手順(ステップ130)と、を含む。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
形状検査装置および形状検査方法
【課題】被検査体が所定の形状および寸法よりもわずかでも小さい場合には寸法不足を確実に検出して欠陥であると判定できる形状検査装置および形状検査方法を提供すること。
【解決手段】被検査体であるスパイダの素形材2の突起部22,23の形状を測定してその断面形状を示す「形状データ」を作成し、作成した「形状データ」からスパイダの素形材2の突起部22,23の軸線方向の全長にわたって最も外側に位置する部分の抽出することにより得られる形状を「基準形状」としてこの「基準形状」をデータ化した「基準形状データ」を作成し、「基準形状データ」と「形状データ」との差分を算出し、算出した差分に基づいてスパイダの素形材2の突起部22,23に欠陥があるかを判定する。
(もっと読む)
角度測定の方法およびそれを実施するための角度測定ジャイロシステム
【課題】検出信号のノイズ、ドリフトを最小にする角度測定の方法を提供する。
【解決手段】既定の算出され推定された一組のパラメータに基づいて一組の推定された信号を算出するために状態観測器231を構成し、ジャイロスコープ21に関連した動的方程式を使用してそのゲインを算出し、算出されたゲインに基づいて、推定された一組のパラメータを算出する。一組の検出信号は、検出モジュール22によって生成され、これと推定された一組のパラメータから推定された信号が算出される。また、状態観測器231によって算出された推定されたパラメータにおける位置および速度に基づいて前記ジャイロスコープ21の回転角φを算出するための角度計算機233とを含む。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 測定対象物の表面プロファイルを、容易に算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並ぶ3個の変位計と、測定対象物との一方(稼動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。測定対象線に沿う表面プロファイル、可動物に固定された基準点の軌跡である倣い曲線のプロファイル、及び可動物の移動に伴うピッチング成分のプロファイルうち、2つのプロイファイルで規定される解の候補を複数個決定する。表面プロファイル、倣い曲線のプロファル、及びピッチング成分のプロファイルうち、解の候補に規定されていないプロファイルに基づいて定義される評価関数の値を適応度として、複数の解の候補に遺伝的アルゴリズムを適用し、最も適応度の高い解の候補を抽出する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 3個の変位計のゼロ点調整を高精度に行うことなく、測定対象物の表面プロファイルを算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並び、相対位置が固定された3個の変位計と、測定対象物との一方(可動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。3個の変位計の測定結果に基づいて、可動物に対する相対位置が固定された基準点の軌跡である倣い曲線のプロファイルを算出する。倣い曲線の算出されたプロファイルの2次成分を、事前に測定されている倣い曲線のプロファイルの2次成分に基づいて補正する。補正された倣い曲線のプロファイルに基づいて、測定対象物の表面のプロファイルを算出する。
(もっと読む)
薄肉部位検出方法及び薄肉部位検出装置
【課題】比較用のデータをあらかじめ準備しておくことなく、薄肉部位の検出が可能な薄肉部位検出方法及び薄肉部位検出装置を提供することを課題とする。
【解決手段】本発明は、壁部表面において厚さが一定の部位naと厚さが不明な部位とに測定点mpがそれぞれ指定され、加熱時及び前記自然冷却時のうち少なくとも一方において測定点毎に温度が時系列に測定され、測定点mp毎の時間と対応した温度データの温度データ群が取得される。この取得された厚さが一定の部位naに指定された測定点spにおける基準データ群と、厚さが不明な部位に指定された測定点cpにおける比較データ群との類似度が導出されこの類似度に基づいて基準データ群が取得された測定点spでの壁部に対する比較データ群が取得された測定点cpでの壁部の薄さの度合いが導出されることで薄肉部位taが検出されることを特徴とする。
(もっと読む)
形状評価装置、形状評価方法および形状評価プログラム
【課題】非球面形状の数式フィッティングとアライメント補正との両方の最適解を容易に得ること。
【解決手段】本発明は、軸対称非球面形状を設計形状とした被評価非球面形状の座標データを測定する測定部10と、測定部10によって測定して得た座標データから非球面式の各係数を求め、当該係数による非球面の形状について並進、回転の座標移動変換、c(曲率)、k(コーニック係数)の係数変更の少なくともひとつを実施し、設計形状との形状差を算出する座標変換計算部231と、座標変換計算部231によって算出される形状差が最小となる並進、回転、c、kの値を非線形最小二乗法によって求める非線形最小二乗計算部232と、非線形最小二乗計算部で並進、回転、c、kの値の少なくともひとつを変更するたびに、形状差が最小となるA(非球面係数)を線形最小二乗法によって算出する線形最小二乗計算部233とを有する形状評価装置である。
(もっと読む)
位置追跡システム、位置追跡装置、位置追跡方法およびプログラム
【課題】床センサにより検出される加圧位置と個々のユーザとを正確に対応付けられるようにすること。
【解決手段】床センサが計測した加圧位置をグループ化し、その重心位置をユーザの位置を示す一つの指標として用いる。そして、グループの重心位置と各ユーザの状態ベクトルとから3種類の接地モデル(右足接地モデル、左足接地モデル、両足接地モデル)を用いるパーティクルフィルタにより接地パタン(右足接地/左足接地/両足接地)を決定し、グループそれぞれにおける各ユーザの重み候補を算出する。そして、この重み候補を用いて、グループとユーザの対応関係を決定する。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
測定装置、成型装置、転写装置および測定方法
【課題】感圧紙等のテスト部材を用いることにより、型の姿勢を従来よりも正確にしかも効率よく測定する。
【解決手段】第1の部材7の平面に対する第2の部材の平面5の傾きを測定する測定装置において、薄い板状に形成され圧力を受けたときに前記圧力の大きさに応じて色合いが変化するテスト部材であって前記各部材の各平面で押圧されて色合いが変化したテスト部材TPの色合いを画像処理することによって、前記第1の部材の平面に対する前記第2の部材の平面の傾きを算出する算出手段17を有する。
(もっと読む)
1 - 20 / 59
[ Back to top ]