
Fターム[2F069NN26]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 統計処理 (156) | 平均値を求めるもの (97)
Fターム[2F069NN26]に分類される特許
1 - 20 / 97
状態検出装置、電子機器及びプログラム
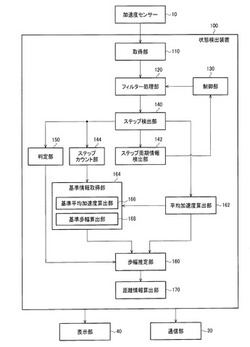
【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム

【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
情報処理装置および情報処理プログラム
【課題】異常データの影響を低減して、測定領域全体の形状データを高精度に得ることができる情報処理装置を提供する。
【解決手段】本発明の情報処理装置は、形状測定装置により所定領域単位でワークの形状を測定して得られた複数の形状データを取得するデータ取得部と、ワークと形状測定装置との位置姿勢関係を示す位置姿勢情報を取得する情報取得部と、位置姿勢情報に基づいて、各形状データの座標系を共通の座標系に変換する変換部と、共通の座標系における一の形状データの座標を補正して当該形状データが示す領域に隣接する領域の形状データにつなぎ合わせるステッチング処理を行うための補正量を、一の形状データが示す領域と隣接する領域との間で重複する領域の形状データを用いて算出する補正量算出部と、補正量または補正量による補正後の形状データに基づいて、ステッチング処理の信頼度を算出する信頼度算出部と、を有する。
(もっと読む)
足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システム
【課題】足底圧の計測において荷重が検出されない欠損部分がある場合でも足底の重心バランスの偏りを常に精度よく判定できる足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システムを提供する。
【解決手段】足底圧の圧力分布を計測する足底圧計測センサ20、足を撮像するテレビカメラ30、処理装置40を備え、足底圧データ取得部41により足底圧データを取得し、足画像取得部42により足画像を取得し、足外形寸法演算部44により足の外形位置を検出して足の外形寸法を演算し、足底重心位置演算部43により、検出された足の外形位置を基準とした足底重心位置を演算し、重心バランス判定部45により足底重心位置と足外形寸法とに基づいて重心バランスの偏りを判定する。また、足の症状判定部46により足の症状を判定し、選定部47により重心バランスの偏りと足の症状に基づいて靴またはインソールを選定する。
(もっと読む)
表面形状測定用触針式段差計及び該段差計における測定精度の改善方法
【課題】表面形状への追随性が良く、かつ、変位雑音が小さい表面形状測定用触針式段差計及び該段差計における測定精度の改善方法を提供する。
【解決手段】変位センサ20の磁性体コアに固有雑音の小さい強磁性体のコアを使用し、低雑音の差動トランスとして形成し、低雑音の差動トランスの出力を、低雑音のデジタルロックインアンプで計測し、変位の測定結果からセンサ20の固有振動に起因する雑音を、低域通過フィルターを用いて移動平均法で除去し、低域通過フィルターの遮断周波数を通常の15Hz程度よりも高くする。
(もっと読む)
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット
【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
3次元形状導出装置および3次元形状導出方法
【課題】センサネットワークを用い、カメラやレーザでは測定困難な部位の形状までも導出する。
【解決手段】3次元形状導出装置100は、自体の3次元位置またはそれに相当する物理量を示す位置情報を発信する流動自在な複数の位置センサ112と、複数の位置センサが発信した位置情報を受信するセンサ情報集約部114と、測定対象物102における複数の位置センサが存在する部分の3次元形状を、複数の位置センサの位置情報に基づいて導出する3次元形状導出部130とを備える。
(もっと読む)
車輪径を調整する方法及び装置
【課題】
車輪径を調整するための方法及び装置を提供する。
【解決手段】
本方法は、現車輪径分布ベクトルを入手するステップと、前記現車輪径分布ベクトルの潜在的磨耗率を決定するために前記現車輪径分布ベクトルと既知車輪径分布ベクトル・クラスタとの間の類似性スコアを計算するステップと、候補目標車輪径分布ベクトルの潜在的磨耗率を決定するために前記候補目標車輪径分布ベクトルと前記既知車輪径分布ベクトル・クラスタとの間の類似性スコアを計算するステップと、前記現車輪径分布ベクトルを目標車輪径分布ベクトルに切り替えることによって得られる潜在的磨耗率の減少が所定の条件に適合するように前記候補目標車輪径分布ベクトルから前記目標車輪径分布ベクトルを選択するステップとを含む。本発明の解決方法により、車輪径分布ベクトルの変更を通して、将来の潜在的磨耗率及び列車の保守整備時に必要な研削の量を最適化することができる。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
軌道監視装置と方法
【課題】自動追尾式トータルステーションの視準が一巡する空白時間に生じた異常を検知できる装置と方法を提供する。
【解決手段】不動点に設置するための自動追尾式トータルステーションと、軌道や枕木に設置するための複数の測点と、枕木に設置するための傾斜計と、各信号を取り込むコンピュータとより構成する。自動追尾式トータルステーションでは複数個所の測点群を一巡して視準し、傾斜計では、各枕木の傾斜を計測し、自動追尾式トータルステーションと傾斜計の信号をコンピュータに入力する。
(もっと読む)
校正装置及び測定装置
【課題】角度2点法プローブのゼロ点校正を角度2点法の環境に対するロバスト性を維持しながら、迅速に、精度よく、かつ簡便に実現できる校正装置及び真直形状測定装置を提供する。
【解決手段】校正対象となる2つの角度センサSS1〜SS2を円板CP1〜CP2に対して相対的に固定し、回転角θ=0度において2つの多面鏡CP1〜CP2の傾斜角を、各角度センサセンサSS1〜SS2を用いて測定して第1の測定値を求め、且つ回転角θ=180度において2つの多面鏡CP1〜CP2の傾斜角を、角度センサセンサSS1〜SS2を用いて測定して第2の測定値を求め、第1の測定値と第2の測定値とに基づいて、前記角度センサのゼロ点誤差を校正できる
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 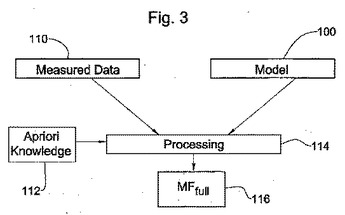 (もっと読む)
(もっと読む)
形状推定システム、角度推定方法及び対象物数推定方法
【課題】2次元平面上の対象物の形状の外周を構成する線分がなす内角を推定する。
【解決手段】複合センサノードは、予め定められた形状をなすように配備され、センシングエリア内における形状推定対象物の有無を検出する複数のセンサと、センサのそれぞれが検出した形状推定対象物の有無を示す検出結果情報をサーバに送信する送信手段とを備え、サーバは、形状推定対象物の頂点の内角がαの場合に、複合センサノードのうち、特定の複合センサノードが形状推定対象物を検出し、その他が検出しないセンシング結果となる複合センサノードの集合の測度を、複合センサノードのパラメータとαから計算する測度計算手段と、測度から内角α1,・・・,αn(nは内角の数)である場合のセンシング結果の期待値を計算する期待値計算手段と、センシング結果と期待値の差分を小さくする内角α1,・・・,αnを探索する探索手段とを備える。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
形状推定システム、サーバ装置、形状推定方法、及び、形状推定プログラム
【課題】位置が特定されていないセンサノードで検出された検出対象に関する情報から、検出対象の形状情報を推定する形状推定システムを提供する。
【解決手段】形状推定システムが、複数のセンサノードとサーバ装置とを備える。複数のセンサノードのそれぞれは、予め定められている複数のセンシングエリア内における検出対象物の有無を検出するセンサ部と、センサ部による検出結果をサーバ装置へ送信する第1の通信部とを有し、複数のセンサノードが、複数のセンシングエリアの設定条件が異なる複数種類のセンサノードからなり、サーバ装置は、複数のセンサノードから送信された検出結果を受信する第2の通信部と、複数のセンサノードから受信した検出結果と、複数のセンサノードの複数のセンシングエリアに関する情報と、複数のセンシングエリアの平均密度に関する情報とに基づいて、検出対象物の形状に関する形状情報の推定値を算出する処理部とを備えている。
(もっと読む)
加速度センサ用補正装置
【課題】車両に搭載される加速度センサの出力値を正確に補正する補正装置を提供する。
【解決手段】車両20に加わる第1の加速度を測定する加速度センサ221と、車両に設置された位置検出手段220又は速度センサとに接続され、制御手段210と記憶手段222を備える加速度センサ用補正装置(ナビゲーション装置)200であって、制御手段210は、位置検出手段220又は速度センサからの出力をもとに第2の加速度を算出し、第1の加速度と第2の加速度とから求められる差分又は車両の傾き等のパラメータを記憶手段222に逐次記憶し、車両の累積走行距離が所定値に達した際に、記憶されたパラメータの平均値を算出し、この平均値を補正値として加速度センサ221を補正する。
(もっと読む)
移動体搭載用機器
【課題】加速度センサの取り付け角度に関係なく、正確に移動体搭載用機器の取り付け角度を算出することが可能な移動体搭載用機器を提供する。
【解決手段】移動体の3軸方向への加速度を検出する加速度センサ131と、移動体が停止状態にある際に加速度センサ131から出力される出力信号に基づいて、重力加速度を算出する重力加速度算出部181と、移動体が加減速移動状態にある際に加速度センサ131から出力される出力信号に基づいて、移動体の移動体加速度を算出する移動体加速度算出部182と、算出された重力加速度と算出された移動体加速度とに基づいて、前記移動体に対する移動体搭載用機器の取り付け角度を算出する取り付け角度算出部183と、を備えるように構成する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
1 - 20 / 97
[ Back to top ]