
Fターム[2F076BE17]の内容
指示記録装置の試験較正と測定試験一般 (4,775) | 測定・試験・監視に共通な手段 (2,016) | データの送受信 (373)
Fターム[2F076BE17]の下位に属するFターム
無線によるもの (171)
Fターム[2F076BE17]に分類される特許
141 - 160 / 202
光ファイバ広域センサシステム
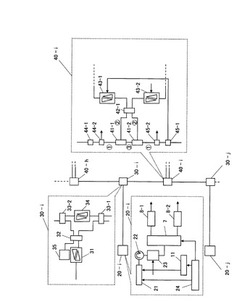
【課題】信号光送受および処理機能等を有する送受処理部を複数式有し、任意の送受処理部で任意のセンサアレイの共有化を可能とする光ファイバ広域センサシステムを提供する。
【解決手段】送受処理部20−iは、信号光源と送信ゲートとブースアンプを有する信号光源部21と、これに接続される往路伝送ファイバと、復路伝送ファイバに接続される受光部23とDMUX7と復調処理部8−1,8−2,…を有する信号受信部とを有する受信部とからなり、合分波増幅器30−iは送受用アンプ31と、多波長励起光源35と、送受用カプラ32と、2個のバス用カプラ33−1,33−2と、これらの間に接続されるバス用アンプ34とからなり、アレイ用合分波器40−iは、2個の合分波器41−1,41−2と、アレイ結合器42−1と、リモートアンプ43−1と、励起光分波器45−1とを備える。
(もっと読む)
監視・制御システム

【課題】 簡単な構成によって計測結果に基づき、監視地点における監視及び制御を可能にする。
【解決手段】 パルス光を発射するOTDR5と、異なる波長λ1,λ2の信号光を発射する第1及び第2のレーザーダイオード6a,6bと、上記パルス光と各信号光を合波して基幹の光ファイバ3に伝播させる光合波部8と、光ファイバ3に設けられている第1及び第2の監視装置2a,2bとを備え、各監視装置2a,2bは光ファイバ3に設けられている光量分岐部9a,9bと波長分波部10a,10bと、上記光量分岐部に接続されている第1及び第2のセンサ11a,11bと、上記波長分波部に接続されている第1及び第2の表示装置14a,14bを備え、上記波長λ1の信号光は第1の表示装置14aに対応し、波長λ2の信号光は第2の表示装置14bに対応している。
(もっと読む)
複数の観測結果の間の差異を検出するシステムおよびその方法
【課題】観測対象に生じた異常を精度良く検出する。
【解決手段】複数の観測結果の間の差異を検出するシステムを提供する。このシステムは、ある観測対象を時間の経過に応じて観測した複数の観測値を含む第1時系列データと、観測対象を時間の経過に応じ観測した複数の観測値を含む第2時系列データとを取得する取得部と、第1時系列データから複数の観測値を反復復元抽出して当該第1時系列データの複製である第1複製データを生成する複製部と、第1複製データの累積確率分布と、第2時系列データの少なくとも一部を含む第2複製データの累積確率分布との間の、同一の観測値における確率値の差分に基づいて、第1時系列データと第2時系列データとの間の相違を示す指標値を算出して出力する算出部とを備える。
(もっと読む)
設備診断方法、設備診断システム及びコンピュータプログラム
【課題】設備ごとに多くのセンサを備える必要がなく、精度の高い設備診断方法及び設備診断システムを提供する。
【解決手段】診断の対象となる設備の状態を示す変数であって、時間と共に変動する時系列データを取得するデータ取得部21と、データ取得部21で取得した時系列データから、前記設備における前記時系列データが決定論的であるか確率論的であるかの指標となる決定論性を表す値を算出する並進誤差演算部24と、並進誤差演算部24で算出された決定論性を表す値が、所定のしきい値を超えて変化した場合に、前記設備が警告すべき状態であると判定する故障判定部26と、を備える。決定論性を表す値は、並進誤差又は順列エントロピーである。決定論性を表す値として順列エントロピーを用いる場合は、順列エントロピー演算部を備える。
(もっと読む)
計測装置管理システム
【課題】複数の計測装置で冗長化して計測する場合でも個々の計測装置の異常を早期に発見することができる計測装置管理システムを提供する。
【解決手段】計測装置管理システム1は、計測対象105a〜105cのうちで同一の計測対象を計測装置104a〜104cで多重に測定し、管理装置102では計測装置診断基準情報202に基づいてその測定データの夫々が正常領域にあるか否かを計測装置診断手段310で診断し、いずれかの計測データが正常領域にない場合に、その正常領域にない計測データに係る計測装置が異常であることを示す情報を出力する。
(もっと読む)
地形監視システム及び該地形監視システムに用いる圧力感知装置
【課題】正確な計測結果を提供できる地形監視システムを提供する。
【解決手段】内部空間327と、該内部空間327を外部と連通する第1と第2の開口325,326とを有するハウシングユニット32と、ハウシングユニット32に張り付けられる圧力感知面312を有し、第1の開口325を密封する圧力センサー31と、ハウシングユニット32に張り付けられて第2の開口326を密封する可撓性シート33と、ハウシングユニット32の内部空間327に注入した液状ミディアム34とを有する圧力感知装置3であって、可撓性シート33が外部圧力の作用により変形すると、対応する圧力が液状ミディアム34を経由して圧力センサー31に伝わり、圧力感知信号を生成する。この圧力感知装置3を複数取り付け、監視する地形の近辺にある所定位置に固定される少なくとも一本の設置フレーム2を有する地形監視システムを提供する。
(もっと読む)
センサ装置、センサシステム及び異種物理量を検出可能なセンサ装置の接続方法
【課題】単機能センサ同士を接続、通信可能としてセンサのみで異種計測値に基づく演算、制御が可能なセンサシステムを構築する。
【解決手段】第1の物理量を検出するための検出手段と、検出手段で検出された検出量に基づいて所定の処理を行う演算手段と、検出手段で検出された物理量と異なる第2の物理量を検出可能な他のセンサ装置と電気的に接続可能で、該他のセンサ装置とデータ通信を行うための通信インターフェース3と、通信インターフェース3に接続されている他のセンサ装置の有無、及び通信インターフェース3を介して、接続される他のセンサ装置が検出する第2の物理量の種別を判定可能な種別判定手段とを備えており、演算手段は、検出手段で検出された第1の物理量に関する検出量と、他のセンサ装置で検出された第2の物理量に関する検出量とに基づいて演算可能としている。
(もっと読む)
検出器の作動方法、および検出器と通信する制御装置
検出器(1)は検出装置(4)によって少なくとも1つのアナログ信号(A)を検出し、評価装置(5)によって少なくとも1つのアナログ信号(A)を使用して少なくとも1つのデジタル信号(D)を作成し、少なくとも1つのデジタル信号(D)は検出器外部の制御装置(2)へ送られる。検出器(1)の監視装置(6)にアナログ信号(A)またはアナログ信号(A)およびデジタル信号(D)が供給される。監視装置(6)は、監視しているの装置(4,5)が適正に機能している場合にのみイネーブル信号(F)を制御部(2)へ送る。通常モードにおいて制御装置(2)は、イネーブル信号(F)も送られてきている場合にのみ、デジタル信号(D)をさらに処理する。さもなければ、制御装置は送られたデジタル信号(D)にエラーが含まれていると評価し、検出器(1)の誤機能に関するメッセージを出力する。制御装置(2)はときおり検査信号(P)を検出器(1)に送って通常モードから検査モードへ切り換わる。検出器(1)は検査信号(P)の伝送に基づいて検査モードに入り、検査モードにおいて監視装置(6)に供給された信号(A,D)を操作して、監視装置(6)が適正に機能している場合には監視装置(6)に、監視している装置(4,5)の適正でない機能を識別させる。制御装置(2)は検査モードにおいて、イネーブル信号(F)が制御装置にそれぞれ加えられて送られる場合、検出器(1)の誤機能に関するメッセージを出力する。  (もっと読む)
(もっと読む)
プラスチック層内部に液晶ディスプレイが埋め込まれた装置筐体
プロセストランスミッタ(102)はトランスミッタ回路(206)を含む筐体を含んでいる。トランスミッタ回路(206)は、ディスプレイ出力を与え、プロセス制御ループ(106)に接続するように構成されている。LCDディスプレイ(130)は、筐体(110)内の透明又は半透明の高分子層に埋め込まれる。LCDディスプレイ(130)は、ディスプレイ出力に接続され、高分子層(132)を介して情報を表示するように構成されている。 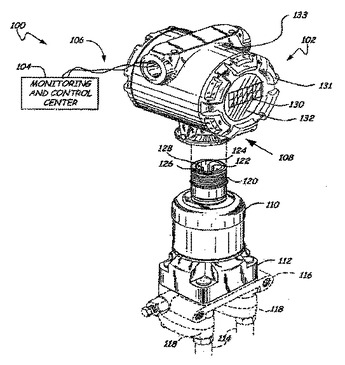 (もっと読む)
(もっと読む)
信号識別方法
【課題】競合学習型ニューラルネットワークを用いて信号のカテゴリを判別するにあたり、カテゴリの境界付近の入力データを高い精度で判別する。
【解決手段】競合学習型ニューラルネットワーク1の学習によって作成されたクラスタリングマップの各ニューロンにガウス関数を割り当てる。ガウス関数の平均値と分散は、学習済みの競合学習型ニューラルネットワーク1における重みベクトルと学習データとを用いて求める。監視対象物から得られた入力データのカテゴリを判定する際には、入力データに対するガウス関数の出力値の総和に基づいて、カテゴリの境界である入力データを判別する。クラスタリングマップにガウス関数を設定することにより、カテゴリの判定精度が向上し、各学習データにガウス関数を設定する場合に比較して処理時間を大幅に短縮できる。
(もっと読む)
センサーインタフェース並びにセンサーインタフェースに関連する方法および装置
センサーインタフェースは、いくつかのセンサー入力およびいくつかのクライアント入力を備える。クライアント入力は、いくつかのクライアントからいくつかのデータ要求を受信するように環境設定されている。いくつかのデータ要求は、特定の種類のデータを取り込むときに使用されるべき特定の物理センサーを識別することなく、戻されるべき特定の種類のデータを指定する少なくとも1つのデータ要求を含む。プロセッサーは、i)いくつかのデータ要求を満たすにはどのセンサーデータを使用することができるかを決定し、ii)いくつかの物理センサーからセンサーデータを受信するようにセンサー入力の中のいくつかを環境設定し、そして、iii)可能であれば、受信されたセンサーデータを用いていくつかのデータ要求を満たすように、環境設定されている。また、このようなセンサーインタフェースに関連する方法および装置が、開示される。  (もっと読む)
(もっと読む)
ヘリコプタ設置による計測システム
【課題】地滑り等の危険箇所への安全且つ確実な設置が可能であるとともに、使用不能または不要となった場合には容易に安全に計測機器を回収することができるヘリコプタ設置による計測システムを提供する。
【解決手段】反射プリズム46を内蔵した計測機器であるプリズム観測体36と、プリズム観測体36が固定された台座部20と、ヘリコプタ54によりワイヤ76で吊り下げるための搬入機構部26及び回収機構部32とから成る観測躯体14を備える。プリズム観測体36から離れた位置にありプリズム観測体36の位置等の情報を検知する測距装置60を有する。設置は、搬入機構部26によりワイヤ76で吊り下げてヘリコプタ54により搬送し、所定の観測地点12にヘリコプタ54から下ろして設置する。回収は、回収機構部32に、ヘリコプタ54により吊り下げられたフック装置74を係合し、吊り上げて回収する。
(もっと読む)
物理量検出装置、格納ユニット、コントロールユニット及びプログラム記憶媒体
【課題】予め複数の処理プログラムを備えることなく、検出対象に応じた処理を行うことが可能な物理量検出装置等を提供する。
【解決手段】流体が流れる流路の状態検知に先立って行われるティーチングモード時に、流体の圧力及び流量をサンプリングするとともに、流路の状態を検知する検出モード時にも流体の圧力及び流量をサンプリングし、検出モード時に得られる圧力におけるティーチングモード時の流量と検出モード時の流量との差が所定値以上である場合には、流路に目詰まりが生じていると判断する。
(もっと読む)
計量機器の遠隔校正システム、および方法
【課題】精密計測を行うための基準量を遠隔供給することにより、被校正機関あるいは産業界の利用者の現場における遠隔校正、および、その認証を行う。
【解決手段】計測標準量を通信に適したパラメータに変換し、あるいは通信に適したパラメータとして生成して遠隔地(2)に送り、あるいは通信に適しない場合は輸送に適した形態の計測標準量にして遠隔地(2)に送り、到着した地点において計測標準に復元することにより校正を可能ならしめ、その結果を認証する。
(もっと読む)
共通パッケージ内で複数の測定量を測定するための組合せセンサ
モジュラセンサシステムが、感知動作のための複数の感知測定量を提供する複数の様々なタイプのセンサを含む。ハウジングが、一般に、様々なタイプのセンサに関連付けられ、それによりハウジングが、センサによって感知すべき媒体を導入する。また、電気的インターフェースが、センサに接続されることがあり、電気的インターフェースは、感知感度を最大にするため、および感知動作に関するセンサの感知再現性および正確なセンサ補償を提供するために、選択されたセンサへの論理的物理的接続を形成できるようにする。 (もっと読む)
建造物診断システム
【課題】外部データを利用することで、閾値等の判定基準値によることなく建造物の異常検知が可能な建造物診断システムを提供する。
【解決手段】診断手段150では、現在値データを所定の閾値あるいは履歴データと比較して正常範囲にあるか否かを判定するのに加えて、前記現在値データが前記正常範囲内にあると判定された場合に、さらに外部データを用いた異常判定を行う。外部データを用いた異常判定では、現在正常範囲にある前記現在値データが今後どのように変化するかを外部データを用いて推定する。この推定では、必要に応じて前記履歴データも使用するようにすることもできる。
(もっと読む)
複数機能センサ回路
例えば、多機能安定回路は温度と圧力との両方を測定する。それは圧力検知可変容量と固定基準容量とを有し、定電流源と温度可変電流源とを有する。完全サイクルは少なくとも2つのフェーズを有している;(1)1の基準容量と1の圧力可変容量を使うサイクルのフェーズ、及び(2)少なくとも基準容量と少なくとも1の温度可変充電源を含むたのフェーズ。他の複数スロープ複数機能が実行される。 (もっと読む)
津波計
【課題】沿岸から遠く離れた深々度に適切に設置でき、しかも高感度のセンサを含んで構成される津波計の提供。
【解決手段】海底SBに設置されるセンサ1と、光源手段20と反射光yの検出手段21とを含んでなる管理装置2と、光源手段20からの入射光xをセンサ1に送り、かつ、このセンサ1側からの反射光yを検出手段21に送るように、このセンサ1と管理装置2とを連絡する光ファイバケーブル3とを含んで構成される。センサ1は、第一受圧板10aを海中との境界とする第一室10と、第二受圧板11aを海中との境界とする第二室11と、オリフィス12bを備えた壁体12aを第一室10との境界とし、かつ、差圧感知受圧板12cを第二室11との境界とした中間室12と、液媒13とを有している。差圧感知受圧板12cに、前記光ファイバケーブル3の一部をなす測定部分31が、固着又は連係されている。
(もっと読む)
動き認識システムおよび動き認識方法
【課題】複数の加速度センサからの情報に基づいて環境における動きを適切に認識する。
【解決手段】センサノード1−1〜1−4からの加速度データより、所定の時間幅(例えば、1秒)毎に実観測の特徴データを求め、この実観測の特徴データに類似度の高いサンプル観測の部分動作のラベルを付与する。実観測の特徴データに類似の高い部分動作のラベルが付与される毎に、それまでの実観測の特徴データに付与されたラベル列と動作辞書24A中の部分動作のラベル列との間でマッチングを行って、動作辞書24A中の尤度の高いサンプル動作をその時の環境における動きとして認識する。
(もっと読む)
類似状況検索システムおよび類似状況検索方法
【課題】環境の状況を適切に認識する。
【解決手段】センサノード1−1〜1−4からの加速度データより、所定の時間幅(例えば、1秒)毎に動きベクトルを求め、動きベクトルDB23に格納する。動きベクトルが求められる毎に、その動きベクトルと標準動きベクトルDB24に格納されている各標準動きベクトルとの類似度を求め、この標準動きベクトルとの類似度を要素とする観測状況ベクトルを作成し、観測状況DB26にその時の時刻(観測時刻)を付して記憶する。また、類似状況検索モジュール27において、今回作成された観測状況ベクトルと観測状況DB26に格納されている各観測状況ベクトルとの比較を行い、類似度の高い観測状況ベクトルおよびその観測時刻を類似状況の検索結果として出力する。
(もっと読む)
141 - 160 / 202
[ Back to top ]