
Fターム[2F077AA30]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 変換範囲の拡大、絶対値の検出 (412) | 複数の検出器又は変換器の使用によるもの (154)
Fターム[2F077AA30]に分類される特許
1 - 20 / 154
検出装置および光学装置
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
アブソリュートエンコーダ

【課題】アドレス判定を正確に行うことができ、精度が高く低コストなエンコーダを提供する。さらに、アドレス切り換え位置近傍の識別を容易にする。
【解決手段】第1波長(λ)で等間隔の第1目盛が形成され、nλ(nは拡張数、λは第1波長)で第1アドレス区間を規定するように構成されているメイントラックと、前記第1アドレス区間と同じアドレス区間が(n+1)λa(λaは第2波長)となるように等間隔で第2目盛が形成された第1アドレストラックと、前記第1アドレス区間と同じアドレス区間が、n(λa+(n2−1)λ)+λaの第3目盛が形成された第2アドレストラックとを少なくとも有するスケール部(20)を有し、前記スケールから位相差を検出し、前記検出した複数の位相差に基づいてアドレス判定を行ない、被測定対象の位置または角度を算出する処理手段(30、40、50、60、70、80)とを有する。
(もっと読む)
回転角度検出装置及びこれを用いた回転角度検出システム
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
位置検出ユニット、及びそれを備えたレンズユニット、カメラ、及びレンズユニットの製造方法、位置検出方法
【課題】起動時において検出対象物を所定の基準位置まで移動させることなく、絶対的な位置を検出することができる位置検出ユニットを提供する。
【解決手段】本発明は、位置検出ユニットであって、検出対象物(16)の変位に対し、単調に増加又は減少する単調信号を出力する第1センサ(20)と、検出対象物の変位に対して互いに位相がずれた2つの正弦信号を出力する第2センサ(24)と、検出対象物の位置に対する単調信号を記憶する第1記憶部(26)と、各正弦信号の極大値及び極小値を記憶する第2記憶部(26)と、検出された単調信号及び記憶された単調信号データに基づいて、検出対象物が正弦信号の何周期目に位置するかを特定すると共に、検出された正弦信号及び記憶された極大極小データに基づいて、特定された周期内における検出対象物の位置を計算し、絶対的な位置を求める位置演算部(28)と、を有することを特徴としている。
(もっと読む)
高分解能非接触式多回転検出システムおよび方法
【課題】高分解能で非接触の態様でシャフトの多回転位置を計測するシステムおよび方法を提供すること。
【解決手段】一実施形態で、多回転検出装置は、シャフトによってなされた回転数を決定するように構成された回転カウンタと、所定の回転の中でシャフトの角度位置を計測するように構成された角度位置センサとを含むことが可能である。回転数は、Mビットの分解能によって決定可能であり、1回転当たりの角度位置は、Nビットの分解能によって計測可能である。適切に選択されているので、回転カウンタは、比較的低い分解能として作動するように構成可能であるが、多回転検出装置は、全範囲にわたって1回転当たりNビットの角度分解能を維持することが可能である。したがって、多回転検出装置はM+Nビットの実効分解能を有することが可能である。
(もっと読む)
異常検出機能を備えた絶対位置検出装置
【課題】異常をより高精度に検知でき得る絶対位置検出装置を提供する。
【解決手段】絶対位置検出装置は、クロック信号C1が示すタイミングで、絶対位置検出用センサ3の出力θ2と高分解能位置検出用センサ2の位置出力θ1との相対誤差Eを算出する相対誤差演算回路6と、相対誤差Eが、予め規定された異常判定値を超えるか否かを判断し、超える場合にはHi、それ以外の場合はLowとなる異常検出信号AFを出力する異常判定器10と、異常検出信号AFがHiのときはノイズ発生周期よりも短い周期の高速側クロックCHを、異常検出信号がLowの時は低速側クロックCLを、クロック信号として出力するクロック切替器11と、クロック信号C1を基に異常検出信号AFでHiが継続する時間を計測し、当該継続時間が前記ノイズ発生周期を越えた場合にアラームを出力する計数器12と、を備える。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
エンコーダ用スケールの製造方法、エンコーダの製造方法、エンコーダ及びモータ装置
【課題】歩留まりの低下を防ぐことが可能なエンコーダ用スケールの製造方法、エンコーダの製造方法、エンコーダ及びモータ装置を提供すること。
【解決手段】基板の一の基板面と基板の外周面との間に設けられるエッジ部を曲面にする面取り工程と、当該面取り工程の後、一の基板面に機能材料を含む液状体の薄膜を形成する薄膜形成工程と、一の基板面にパターンを形成するパターン形成工程とを含む。
(もっと読む)
回転機械の温度測定装置
【課題】スリップリング等を用いた複雑な構造を採用しなくても、回転部材1aの温度を測定する事ができる装置を実現する。
【解決手段】前記回転部材1aの外周面に1対のエンコーダ9a、9bを、軸方向に離隔した状態で設置し、これら両エンコーダ9a、9bの外周面に形成された被検出面10a、10bに、センサ11a、11bの検出部を対向させる。前記両エンコーダ9a、9bのうちの一方のエンコーダ9aは、前記回転部材1aに支持固定する。同じく他方のエンコーダ9bは、この回転部材1aに、転がり軸受12を介して、この回転部材1aに対する回転を可能に支持する。前記両エンコーダ9a、9bを、温度変化に伴い周方向に長さ寸法を変化させる、熱変形部材15によって接続する。
(もっと読む)
回転角度検出装置
【課題】 安価で耐久性のあるレゾルバを使用しながら、絶対的な回転角度位置を認識することが可能な回転角度検出装置を提供する。
【解決手段】 回転角度検出装置は、レゾルバ14におけるロータ32の外周部に90度の角度毎に配設された4個のホールIC41、42、43、44と、ロータ32に付設された磁石37とを備える。磁石37は、ロータ32の外周部の約100度の角度範囲に至る領域に配設されている。この磁石37は、ロータ32と同期して回転し、その回転角度位置に対応して、4個のホールIC41、42、43、44のうちの1個のホールIC、または、隣接する2個のホールICが磁気を検出する。
(もっと読む)
位置検出装置
【課題】本発明は、広い区間において位置検出が可能で、さらに簡単な構成でありながら、広い温度範囲で物体の位置を正確に検出できる位置検出装置を提供することを目的とする。
【解決手段】本発明の位置検出装置は、第1、第2の磁気検出素子を有する磁気検出部21と、磁石51とを備え、前記第1の磁気検出素子の出力と前記第2の磁気検出素子の出力との比から、磁束密度がX軸となす角度θを求めることによって、前記磁石のX軸方向の相対的な移動距離を検出したものである。
(もっと読む)
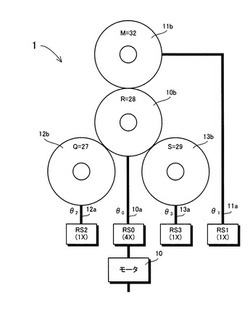
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
エンコーダ並びにスケール及びスケールを製造するための方法
【課題】
本発明は、電磁誘導式に走査可能なスケール1を有するエンコーダに関する。当該エンコーダは、スケール1の目盛要素12を走査するための走査ユニット2を有する。このため、走査ユニット2は、交番電磁場を生成するための励磁ユニット21と目盛要素12によって位置に依存して変調された交番電磁場を検出するための検出ユニット22とを有する。
【解決手段】
スケール1は、特に冷間圧延ボンドによって提供される層スタック10から構成される。当該層スタックは、スケール1の機械的な特性を主導して決定する基板103と、高い透磁率を有する強磁性材料から成るキャリア層102と、このキャリア層102上に存在して目盛要素12を形成している、良好な電気伝導性の材料から成る目盛層101とを有する。
(もっと読む)
アブソリュートエンコーダ装置及びモータ
【課題】組み付けが容易であり高分解能を達成する小型のアブソリュートエンコーダ装置を提供することを目的とする。
【解決手段】本発明は、第1の磁気パターン14(2極)と第2の磁気パターン16(多極)とを有する永久磁石4と、第1の磁気パターン14の磁界を検出する第1の磁気センサ5と、第2の磁気パターン16の磁界を検出する第2の磁気センサ6と、第1及び第2の磁気センサ5,6の出力信号から、回転軸2の絶対的な回転角度を算出する信号処理回路7とを備えるエンコーダ装置1であり、第1及び第2の磁気センサ5,6と信号処理回路7は単一基板8に固定され、第1の磁気パターン14は永久磁石4の内側において軸方向と交わる方向に延びる面上に形成され、第2の磁気パターン16は永久磁石4の外周面に形成される。
(もっと読む)
角度検出装置
【課題】故障に対する冗長性が高く、絶対角度の検出を高い精度で行える技術を提供する。
【解決手段】シャフト103にVRレゾルバ120とMRセンサ114を取付け、両者の軸倍角を2以上とし、且つ、両者の軸倍角の差を1とする。VRレゾルバ120の出力から算出される角度とMRセンサ114の出力から得られる角度の差からシャフト103の絶対角が算出される。ここで、VRレゾルバとMRセンサ114の故障モードが異なるので、故障に対する冗長性を確保することができる。
(もっと読む)
移動体の絶対値型位置検出装置
【課題】長い距離に亘って移動体の絶対位置を正確に検出可能で低コストの移動体の絶対値型位置検出装置を提供する。
【解決手段】移動体の絶対位置を特定する絶対値特定パターンが記録されている絶対位置特定スケール10と、スケールの絶対位置を検出する検出手段と、からなる移動体の絶対値型位置検出装置1であって、スケール10の隣接するスケールは順次その一部が重なるように所定のオーバーラップ量を保持して直列に配置され、検出手段はスケール毎に各々配置されており、オーバーラップ量の絶対位置および各スケールのオーバーラップ内の特定位置を記憶しておく不揮発性記憶部31と、検出手段によるスケールの絶対位置の検出結果と不揮発性記憶部31に記憶されている情報から移動体の絶対位置を演算する演算部30とを備えた。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、部品点数が少なく安価なものを提供することを目的とする。
【解決手段】カバー20に外方開口の略箱状で、側壁部20Bに端子21が内外方に貫通したコネクタ部20Aを一体に形成すると共に、内方の端子21の接続部21Aに配線基板17を接続することによって、カバー20にコネクタ部20Aが一体に形成されているため、部品点数が少なく安価な回転角度検出装置にすることができる。
(もっと読む)
角度検出器及び電動パワーステアリング装置
【課題】 製造コストを低減可能な角度検出器等を提供する。
【解決手段】 角度検出器100は、第1の回転体12と、第2の回転体32と、前記第1の回転体及び前記第2の回転体を連結する連結部22と、前記第1の回転体と連動する第1の副回転機構13と、前記第1の副回転機構の回転状態を検出する第1の検出機構14と、前記第2の回転体と連動する第2の副回転機構33と、前記第2の副回転機構の回転状態を検出する第2の検出機構34と、前記第1の副回転機構の回転状態と前記第2の副回転機構の回転状態とに基づき前記連結部のねじれ状態を演算する第1の演算部42と、前記第1の回転体と連動する仮想の副回転機構15の回転状態と前記第1の副回転機構の回転状態とに基づき前記第1の回転体の回転角を演算する第2の演算部44とを備える。仮想の副回転機構15の回転状態は、連結部22のねじれ状態に基づく。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を検出することのできる装置を提供する。
【解決手段】本発明に係る回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たす機構を実現する実施例として、回転角検出装置は、第1回転軸から第n回転軸の隣接する回転軸間で、歯数(m±1)のギアが歯数mのギアと噛み合うギア機構が形成される。
(もっと読む)
1 - 20 / 154
[ Back to top ]