
Fターム[2F077AA43]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 部材の兼用又は共用、部用点数の削減 (479)
Fターム[2F077AA43]の下位に属するFターム
既存部材の利用 (39)
Fターム[2F077AA43]に分類される特許
1 - 20 / 440
回転角度検出装置
回転検出装置およびその製造方法
回転角度検出装置
【課題】小型化薄型化を図り、耐振動性に優た回転角度検出装置を提供する。
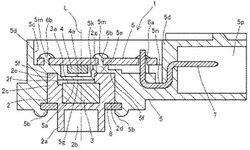
【解決手段】回転部材2と、回転部材2に固定され回転する磁石3と、磁石3に対向して配置され磁石3の回転することにより変化する磁界の強さを検出する磁気検出部4と、回転部材2を回転自在に収納する第1収納部5aと磁気検出部4を収納する第2収納部5cとを有し第1収納部5aと第2収納部5cと区切る仕切部5eを備えたハウジング5と、を備えた回転角度検出装置1において、回転部材2の端部に第1収納部5aの底面である仕切部5eに接し回転部材2の外周と連続した凸状ガイド2eを設け、この凸状ガイド2eの内側に第1凹部2fを設け、第1収納部5aに凸状ガイド2eを案内する凹状溝5fを設けるとともに、この凹状溝5fの内側に凸部5gを設け、凸状ガイド2eの内側に第1ストッパ2gを設け、第1収納部5aの凸部5gの外側に第2ストッパ5hを設けたものである。
(もっと読む)
電動機の駆動装置

【課題】駆動装置側に複数種類の通信プロトコルに応じた通信部及び検出プログラムを備えることで、使用する検出器の選択肢を拡大する。
【解決手段】電動機の可動子の位置または速度を検出するエンコーダの検出データを、エンコーダとの間のシリアル通信により取得し、前記検出データを用いて電動機を駆動する駆動装置において、複数のエンコーダ2a,2b,2cがそれぞれ有する複数種類の通信プロトコルに従って前記検出データを送受信可能な複数の通信部3331a,3331b,3331cと、これらの通信部を介して受信した前記検出データを処理する複数の検出プログラム3342a,3342b,3342cとを備え、各通信プロトコルに従って送信されたデータ要求コマンドに対する応答データが正しいことをもってエンコーダの通信プロトコルを同定する。
(もっと読む)
エンコーダ搭載機器およびエンコーダ装置
【課題】簡素な回路構成で、複数のエンコーダの検出結果を伝送することのできるエンコーダ搭載機器、およびエンコーダ装置を提供すること。
【解決手段】エンコーダ装置100およびエンコーダ搭載機器1000では、エンコーダ装置100側および制御部210側に同期式の半2重シリアル通信用のインターフェース機器150、250を設け、制御部210は、複数の演算処理部11での演算結果が各々送信されるタイミングを規定する指令信号を異なるタイミングで送信する一方、エンコーダ装置100は、指令信号に対応するタイミングで複数の演算処理部11での演算結果、および複数の演算処理部11での演算結果が出力されるタイミングに対応する同期信号CLKの各々をシリアル信号として出力する。
(もっと読む)
角度検出器の自律校正方法、角度検出器、円周目盛校正装置および角度検出器の校正装置
【課題】逐次2点法を用いて1回転の各角度位置において目盛誤差を精度良く算出可能な角度検出器の自律校正方法を提案すること。
【解決手段】角度検出器の自律校正方法は、第1目盛読取ヘッド11と第2目盛読取ヘッド12を、1回転を整数等分せず、且つ、複数回転Nを整数M等分する角度間隔αで配置し、目盛円板がN回転する間における第1、第2目盛読取ヘッド11、12の読みを、予め定めたデータサンプリング間隔でデータ読取装置13に取り込む。データ読取装置13では、第1、第2目盛読取ヘッド11、12の読みの差から、データサンプリング間隔で得られる、目盛円板4、5の角度目盛誤差に関する逐次2点法によるデータを生成し、複数回転N分のデータの平均がゼロになることを利用して、データを合成することで、目盛円板4、5の目盛誤差(校正値)をデータサンプリング間隔で求める。
(もっと読む)
位置検出装置
【課題】検出精度の高い小型の位置検出装置を提供する。
【解決手段】第1磁石21および第2磁石22は、ストローク方向に直線移動するストローク部61に設けられる。第1磁石21および第2磁石22は、ストローク方向と直交する方向において同一方向に着磁され、ストローク方向に離間するよう設けられている。ホール素子51は、第1磁石21および第2磁石22の固定部と対向する端部から所定距離d離れて位置し、固定部70に設けられ、ストローク方向に直交する感磁面511を有する。
(もっと読む)
回転検出装置およびその製造方法
【課題】フォーミングやホルダーを必要とすることなく、従来よりも全体の体格を小さく抑制できる回転検出装置およびその製造方法を提供する。
【解決手段】回転体40の回転状態を検出して回転検出信号を出力する回転検出部11と、回転検出部11と電気的に接続されて回転検出信号を外部装置に伝達する信号伝達部材13と、少なくとも信号伝達部材13の一部および回転検出部11を保持する本体部12とを備える回転検出装置10において、本体部12は、回転検出部11の端子と信号伝達部材13とを接合した後、当該接合した接合部位、信号伝達部材13の一部および回転検出部11を少なくとも含めて熱硬化性樹脂によって一体成形され、回転検出部11に対応する部位に凹部12aを有する。この構成によれば、フォーミングやホルダーを必要とすることなく、回転検出装置10全体の体格を小さく抑制することができる。
(もっと読む)
エンコーダ、アクチュエータ
【課題】センサの設置姿勢を変更したとしても、ケーブルの引き回しや取付用ブラケットの変更が不要なエンコーダを提供する。
【解決手段】エンコーダ60は、一方向に向けて所定のパターンが形成されたスケール61と、スケール61の側方に配置される原点識別部62と、スケール61及び原点識別部62に対して対向可能に配置されるセンサ本体部64と、を備え、センサ本体部64は、スケール61のパターンを読み取る第一素子66と原点識別部62を読み取る2つの第二素子67と筐体70とを有し、第一素子66が筐体70の中央に配置され、2つの第二素子67が筐体70の中央Cに対して点対称又は線対称となる位置に配置される。
(もっと読む)
センサユニットおよび変位検出装置
【課題】製造コストを低減でき、耐久性を向上できるセンサユニットを提供する。
【解決手段】センサユニット10は、対象物に取り付けられる2つの部材であって、1つの回動軸41に対し回動可能に連結された2つの部材11・12と、対象物の変位に応じて変化する、2つの部材11・12がなす角度を検出する角度センサ13とを備える。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、シフトレバーの操作に伴い、所定の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる着磁態様を有する。シフトレバーの操作に伴い、磁石10が各ホールIC21〜23の設けられる直線に対し交差するかたちで直線運動されると、両直線のなす角度毎に、各ホールIC21〜23による検出信号の出力差が一義的に決まる。
(もっと読む)
回転角度検出装置
【課題】乗算型DACおよびSIN-ROMテーブル、COS−ROMテーブル等の専用回路を不要にした回転角度検出装置を提供する。
【解決手段】回転検出信号sinθ・f(t)をA/D変換するA/D変換器3Aと、回転検出信号cosθ・f(t)をA/D変換するA/D変換器3Bと、A/D変換器3Aで変換した回転検出信号sinθ・f(t)から基本波成分の振幅強度sinθを抽出するフーリエ分析手段4Aと、A/D変換器3Bで変換した回転検出信号cosθ・f(t)から基本波成分の振幅強度cosθを抽出するフーリエ分析手段4Bと、前記振幅強度sinθ、cosθと内部推定角度φから合成波sin(θ−φ)を生成するとともに、該合成波sin(θ−φ)の極性にもとづき内部推定角度φを回転角度θに一致するように制御する合成波生成・位相制御器5と、回転検出器への正弦波または2値の励磁信号を生成する励磁信号生成器7と、を有する。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、第1の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる第1の着磁領域10Aを有する。また、磁石10は、第2の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が上記比例関係とは傾き正負逆の比例関係となる第2の着磁領域10Bを有する。各ホールIC21〜23による検出電圧は、シフトレバーが第1の直線上の操作ポジションにある場合と、シフトレバーが第2の直線上の操作ポジションにある場合とで、大小関係が逆になる。
(もっと読む)
バリアブルリラクタンス型レゾルバ及び回転角検出装置
【課題】冗長性を持つレゾルバを少ないコイル数で実現する。
【解決手段】2つの励磁コイル(励磁Aコイル,励磁Bコイル)と2つの検出コイル(検出Aコイル,検出Bコイル)を有する。励磁Aコイルと励磁Bコイルは互いに異なる周波数で励磁される。検出Aコイルと検出Bコイルはそれぞれ2つの極対数ms1,ms2の正弦波とし、巻数を設定する。ms1,ms2と、励磁Aコイル,励磁Bコイルの極対数mx1,mx2と、ロータの極対数mrが所定の関係となるように設定する。
(もっと読む)
運動検出装置
【課題】磁界検出部の個数を少なくすると共に、検出パルスの欠落が生じても回転数または周回数を正確に計数できるようにする。
【解決手段】被検出体と共に回転する可動部43には磁石51〜54が設けられ、可動部43の外周側には大バルクハウゼン効果により検出パルスを出力する磁気センサ61〜63が設けられ、磁石51〜54および磁気センサ61〜63の配置は、磁石51〜54において、可動部43が右回転する間に各磁気センサ61〜63の磁化の方向を反転させる点を右回転反応点R1、R2、R3、R4とすると、磁気センサ61〜63のうちの1つの磁気センサが上記右回転反応点のうちの1つと向かい合うとき、磁気センサ61〜63のうちの他の各磁気センサが上記右回転反応点のいずれとも向かい合わない等の条件を充足するように設定されている。
(もっと読む)
位置検出装置
【課題】 特に、従来に比べてコストを抑えるとともに信頼性に優れた位置検出装置を提供することを目的とする。
【解決手段】 シフトレバー2と、シフトレバー2の上端部に設けられたシフトノブ10と、下端部に設けられた電極部21と、シフトレバー2を回動可能に支持する動作支点25と、電極部21と非接触にて配置された静電容量結合型センサ20と、を有する。シフトノブ10の移動操作によりシフトレバー2が回動して電極部21が前記静電容量結合型センサ20の表面を非接触を保って移動し、静電容量結合型センサ20では、電極部21の移動に伴う静電容量変化に基づいて、電極部21の位置を検出する。これによりシフトポジション情報及び各シフトポジション間の軌跡情報を取得することができる。
(もっと読む)
弾性表面波センサ
【課題】1つのSAWデバイスによって、歪みと温度の両方を測定できるSAWセンサを提供する。
【解決手段】SAWデバイス1を測定物20の一面201上に配置し、SAWデバイス1の基板下面102のうち伝搬路13の真下に位置する領域102aを測定物20に固定し、基板下面102のうち駆動電極11および反射器12の真下に位置する領域102b、102cを測定物20に固定しない構造とする。この構造では、測定物に歪みが生じると、基板上面の伝搬路13のみに歪みが生じることとなり、反射器12で反射した弾性表面波に位相変化が生じる。このときの位相変化は温度変化の影響をほとんど受けないので、この位相変化から測定物の歪みを測定できる。また、この構造では、SAWデバイス1の共振周波数は、温度変化によって変化し、測定物の歪みの影響を受けないので、共振周波数変化から温度を測定できる。
(もっと読む)
位置検出装置およびスロットル弁装置
【課題】磁界検出式の位置検出センサを有する位置検出装置において、部品を追加することなく、外乱磁界の影響を低減することにある。
【解決手段】スロットル弁装置1に組み付けられて、スロットル弁を保持するシャフトの回転角度を測定する回転角度検出装置5は、シャフトの回転角度を磁界検出により検出する位置検出センサ20と、位置検出センサ20と電気的に接続するターミナル21と、位置検出センサ20と外部環境とを隔てるセンサカバー11とを備え、ターミナル21の位置検出センサ20近傍に配される部分にはNiめっきが施されている。これによれば、Niは強磁性体であるため、位置検出センサ20近傍のターミナル21にNiめっきをすることで、ターミナル21が外乱磁界を遮断する磁気遮蔽体として機能する。つまり、別部品を追加することなく、外乱磁界の影響を低減することができる。
(もっと読む)
回転電機
【課題】回転電機の軸方向の寸法を短縮する。
【解決手段】回転軸12と、回転軸12に一体回転可能に設けられたロータ13と、ロータ13の径方向外側に設けられたステータ14と、ステータ14を支持するハウジング11と、回転軸12と一体回転可能なレゾルバロータ35、及びレゾルバロータ35に対して径方向に対向するレゾルバステータ34を有するレゾルバ15とを備える回転電機であって、レゾルバステータ34を含む組立部品であるレゾルバユニット21をさらに備えており、レゾルバユニット21は、回転軸12を回転自在に支持する転がり軸受20と、レゾルバステータ34を嵌合させる第1嵌合部46、及び転がり軸受20を嵌合させる第2嵌合部47を有し、かつハウジング11に着脱可能に取り付けられるケース部材41と、を備え、レゾルバユニット21の少なくとも一部が、ロータ13の径方向内方に配置されている。
(もっと読む)
近接センサ
【課題】磁石のばらつきによる影響を受けない高精度の近接センサとする。
【解決手段】希土類ボンド磁石である磁石10の射出成形時にN、Sの磁極面間の中間に第1ヨークをインサート成形して、第1ヨークの突出部22を磁極面12に対して垂直な壁面から突出させる。第2ヨーク30の突起部32を突出部22に対向させて本体部31を磁石10の壁面に平行に配置し、突出部22と突起部32間の空間には当該突出部と突起部を結ぶ方向を磁気感応方向とするホールIC40を配置する。被検出部材50が磁極面12から離間しているときは磁束が磁気感応方向を横切るが、被検出部材50が磁極面12に近接すると突起部32と突出部22間を磁気感応方向に磁束が流れて、ホールIC40が磁束密度の変化を高感度で検出する。1個の磁石10のみを備えるので、複数の磁石ごとのばらつきや取付けのばらつきによる悪影響を受けない。
(もっと読む)
1 - 20 / 440
[ Back to top ]