
Fターム[2F077CC07]の内容
感知要素の出力の伝達及び変換 (32,270) | 変換器の形式 (2,031) | 周期差信号型 (57)
Fターム[2F077CC07]に分類される特許
1 - 20 / 57
回転角度検出装置
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
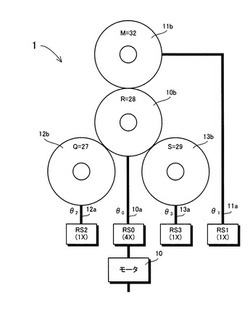
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
アブソリュートエンコーダ

【課題】アドレス判定を正確に行うことができ、精度が高く低コストなエンコーダを提供する。さらに、アドレス切り換え位置近傍の識別を容易にする。
【解決手段】第1波長(λ)で等間隔の第1目盛が形成され、nλ(nは拡張数、λは第1波長)で第1アドレス区間を規定するように構成されているメイントラックと、前記第1アドレス区間と同じアドレス区間が(n+1)λa(λaは第2波長)となるように等間隔で第2目盛が形成された第1アドレストラックと、前記第1アドレス区間と同じアドレス区間が、n(λa+(n2−1)λ)+λaの第3目盛が形成された第2アドレストラックとを少なくとも有するスケール部(20)を有し、前記スケールから位相差を検出し、前記検出した複数の位相差に基づいてアドレス判定を行ない、被測定対象の位置または角度を算出する処理手段(30、40、50、60、70、80)とを有する。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
回転角度検出装置及びこれを用いた回転角度検出システム
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
演算装置、相対移動量測定装置、および、演算方法
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
エンコーダ並びにスケール及びスケールを製造するための方法
【課題】
本発明は、電磁誘導式に走査可能なスケール1を有するエンコーダに関する。当該エンコーダは、スケール1の目盛要素12を走査するための走査ユニット2を有する。このため、走査ユニット2は、交番電磁場を生成するための励磁ユニット21と目盛要素12によって位置に依存して変調された交番電磁場を検出するための検出ユニット22とを有する。
【解決手段】
スケール1は、特に冷間圧延ボンドによって提供される層スタック10から構成される。当該層スタックは、スケール1の機械的な特性を主導して決定する基板103と、高い透磁率を有する強磁性材料から成るキャリア層102と、このキャリア層102上に存在して目盛要素12を形成している、良好な電気伝導性の材料から成る目盛層101とを有する。
(もっと読む)
角度検出装置
【課題】故障に対する冗長性が高く、絶対角度の検出を高い精度で行える技術を提供する。
【解決手段】シャフト103にVRレゾルバ120とMRセンサ114を取付け、両者の軸倍角を2以上とし、且つ、両者の軸倍角の差を1とする。VRレゾルバ120の出力から算出される角度とMRセンサ114の出力から得られる角度の差からシャフト103の絶対角が算出される。ここで、VRレゾルバとMRセンサ114の故障モードが異なるので、故障に対する冗長性を確保することができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、部品点数が少なく安価なものを提供することを目的とする。
【解決手段】カバー20に外方開口の略箱状で、側壁部20Bに端子21が内外方に貫通したコネクタ部20Aを一体に形成すると共に、内方の端子21の接続部21Aに配線基板17を接続することによって、カバー20にコネクタ部20Aが一体に形成されているため、部品点数が少なく安価な回転角度検出装置にすることができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、検出する回転角度の誤差が少なく確実な角度検出が可能なものを提供することを目的とする。
【解決手段】磁石15A、15Bや磁石16A、16Bを第一及び第二の検出体12、13の回転中心C1、C2から所定間隔離れて対面配置すると共に、第一及び第二の検出体12、13の回転中心C1、C2上に磁気検出素子7、8を対向配置することによって、磁石15A、15Bや磁石16A、16Bの間に発生する直線状の磁力線の範囲が拡がるため、磁気検出素子7、8の位置ズレが多少生じても、検出信号の誤差が小さく、検出される回転角度の誤差を少なくすることができる。
(もっと読む)
角度検出器及び電動パワーステアリング装置
【課題】 製造コストを低減可能な角度検出器等を提供する。
【解決手段】 角度検出器100は、第1の回転体12と、第2の回転体32と、前記第1の回転体及び前記第2の回転体を連結する連結部22と、前記第1の回転体と連動する第1の副回転機構13と、前記第1の副回転機構の回転状態を検出する第1の検出機構14と、前記第2の回転体と連動する第2の副回転機構33と、前記第2の副回転機構の回転状態を検出する第2の検出機構34と、前記第1の副回転機構の回転状態と前記第2の副回転機構の回転状態とに基づき前記連結部のねじれ状態を演算する第1の演算部42と、前記第1の回転体と連動する仮想の副回転機構15の回転状態と前記第1の副回転機構の回転状態とに基づき前記第1の回転体の回転角を演算する第2の演算部44とを備える。仮想の副回転機構15の回転状態は、連結部22のねじれ状態に基づく。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を検出することのできる装置を提供する。
【解決手段】本発明に係る回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たす機構を実現する実施例として、回転角検出装置は、第1回転軸から第n回転軸の隣接する回転軸間で、歯数(m±1)のギアが歯数mのギアと噛み合うギア機構が形成される。
(もっと読む)
回転角度検出装置およびステアリング装置
【課題】回転角度検出装置において、回転部品の回転角度を検出するために互いに連動する主回転部品および副回転部品から構成される回転部品群の設計の自由度を大きくする。
【解決手段】回転角度検出装置4は、回転中心線Lを中心にステアリング装置1の出力軸21と一体に回転する主回転部品41と、所定回転比で主回転部品41と連動して回転する第1,第2副回転部品51,61と、第1,第2副回転部品51,61の第1,第2回転角度θ1,θ2に応じた第1,第2検出信号S1,S2を出力する第1,第2磁気抵抗素子71,72と、第1,第2検出信号S1,S2に基づいて操舵角θを検出する回転角度検出手段49とを備える。主回転部品41と第1,第2副回転部品51,61との間での回転の伝達は、主回転部品41および第1,第2副回転部品51,61の接触面42,52;42,62同士の摩擦により行われる。
(もっと読む)
バーニア式位置検出装置
【課題】装置の構造を簡素化することができ、かつ簡単な処理にて位置を検出することができるバーニア式位置検出装置を提供する。
【解決手段】回転板3の内側寄りに、磁極対が4つの内側磁極パターン6bを設け、回転板3の外側寄りに、磁極対が3つの外側磁極パターン7bを設ける。内側磁極パターン6bの対向位置に第1センサ部6aを設け、外側磁極パターン7bの対向位置に第2センサ部7aを設ける。第2センサ部7aは、外側磁極パターン7bに対して回転板3の回転方向に所定量ずらして配置される。このため、第1センサ部6a及び第2センサ部7aの信号組合せと、回転板3の検出角度とが一義的な値をとる。よって、第1センサ部6a及び第2センサ部7aの信号組合せを単に確認するだけで、回転板3の回転角度が検出可能となる。
(もっと読む)
バーニア式位置検出装置
【課題】位置検出の分解能を向上することができるバーニア式位置検出装置を提供する。
【解決手段】回転板3は、2枚の回転板9,10が重ね配置された形状をとる。第1回転板9の周縁に、軸4回りに沿って第1被検出突部6bを複数(3つ)設け、第2回転板10の周縁に、軸4回りに沿って第2被検出突部7bを複数(2つ)設ける。そして、第1被検出突部6bの対向位置に第1センサ部6aを配置し、第2被検出突部7bの対向位置に第2センサ部7aを配置する。第2回転板10を第1回転板9に対して基準位置から回転方向に所定角度ずらし配置する。これにより、回転板3の回転時、第1センサ部6aから割り出される符号と、第2センサ部7aから割り出される符号とが、交互に値が切り換わる。
(もっと読む)
回転角度検出装置
【課題】誤差要因の影響を抑制し、回転角度の検出精度をより安定的に維持することができる回転角度検出装置を提供する。
【解決手段】最終的な絶対回転角度θrは、第1の仮絶対回転角度θabの理想値である。このため、絶対回転角度θrと第1の仮絶対回転角度θabとの差の値である誤差値Δθabは、第1及び第2の従動歯車の回転角度α,βの相対誤差でもある。そこで、誤差値Δθabに基づき算出される補正値εを第1の仮絶対回転角度θabに加味し、これを使用して周期数iを演算するようにした。補正後の第1の仮絶対回転角度θabは前記相対誤差の影響が吸収されたものとなる。すなわち、第1及び第2の従動歯車の回転角度α,βの相対誤差が許容範囲を超える場合であれ、当該相対誤差が存在しない状態に近似した状態で周期数iが演算される。
(もっと読む)
回転検出器
【課題】高分解能、高耐久性、高信頼性を備えた磁性体歯車と磁気センサとバイアス磁石を用いたアブソリュートエンコーダである回転検出器を提供すること。
【解決手段】回転体の回転軸5に同軸に取り付けられた2個の磁性体歯車1,2と、この磁性体歯車1,2の各々に対向するように配置された2個の磁気センサ7,8と、磁性体歯車1,2の回転に応じて磁気センサ7,8に印加される磁束密度が変化するように配置されたバイアス磁石6とを備えている。磁気センサ7,8の各々は、磁性体歯車1,2の回転に応じて1歯あたり90度位相差を有するA/B相の正弦波出力を1位相だけ出力するアブソリュートエンコーダであり、磁性体歯車1,2の歯数が1歯だけ異なるように構成されている。
(もっと読む)
リラクタンス型レゾルバ
【課題】生産性が高く、製造コストが安い上に、外来ノイズに対して角度検出誤差の少ないレゾルバを実現する。
【解決手段】二個の磁極歯を一体化したステータコア2をプリント基板5に設けられた孔に貫通させるとともに、プリント基板5のうち孔の周囲に巻き方向が互いに逆になったコイルパターン3を設ける。そして、ステータコア2およびプリント基板5を、この磁極歯が、回転軸4が偏心して取り付けられたロータ1に近接するように配置し、ロータ1の回転角度に応じて変化するコイル3のインダクタンス変化を用いて回転角度を検出する。
(もっと読む)
磁気検出素子及びこれを用いた回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる磁気検出素子及びこれを用いた回転角度検出装置に関し、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】略矩形状に配列された四つの磁気抵抗22A〜22Dの、対向する二つずつの磁気抵抗22Aと22B、磁気抵抗22Cと22Dを接続すると共に、この磁気抵抗22Cと22Dの両端に切換手段24Aと24Bを設けて磁気検出素子21を形成すると共に、これを磁石34や35に対向して配置し、制御手段37が磁気検出素子21の切換手段24Aと24Bを切換え、差動増幅手段27Aを介した磁気抵抗22からの複数の磁気信号を減算して、回転体31の回転角度を検出することによって、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
1 - 20 / 57
[ Back to top ]