
Fターム[2F077TT33]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802) | 多値化 (88)
Fターム[2F077TT33]の下位に属するFターム
PCM符号 (7)
Fターム[2F077TT33]に分類される特許
1 - 20 / 81
検出装置および光学装置
回転角信号断線検出方法及び装置
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
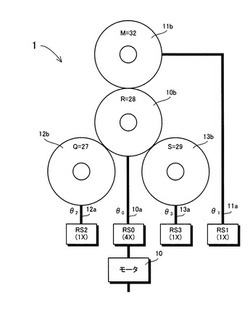
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
検出装置、駆動装置

【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
モータ駆動制御装置及び方法
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】モータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、複数のセンサ信号を所定の複数のしきい値レベルと比較して位相を検出し、検出した位相を示す第1の位相情報信号を出力し、複数のセンサ信号どうしを比較して位相を検出し、検出した位相を示す第2の位相情報信号を出力し、第1の位相情報信号及び第2の位相情報信号に含まれる検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号の中から一つを選択し、前記選択されたセンサ信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、検出した位相を示す位相情報信号を出力する。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】複数の周期パターンに対する検出部による検出周期を切り替えるエンコーダにおいて、位置検出の遅れを回避する。
【解決手段】エンコーダは、第1の周期パターン11および第2の周期パターン12が設けられたスケール10と、該スケールとの相対移動が可能な検出部22とを有する。検出部22は、第1の検出状態と第2の検出状態との切り替えが可能であり、第1の検出状態にて第1の周期パターンに応じた第1の信号を出力し、第2の検出状態にて第2の周期パターンに応じた第2の信号を出力する。処理部30,40は、検出部から取り込んだ第1および第2の信号の双方を用いて第1の絶対位置を算出する第1の処理を行った後、該検出部から取り込んだ一方の信号を用いて相対移動量を算出する。処理部は、第1の処理において最後に設定した検出状態と同じ検出状態の検出部から一方の信号を取り込む。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ及びエンコーダのパターン検出方法を提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
高分解能非接触式多回転検出システムおよび方法
【課題】高分解能で非接触の態様でシャフトの多回転位置を計測するシステムおよび方法を提供すること。
【解決手段】一実施形態で、多回転検出装置は、シャフトによってなされた回転数を決定するように構成された回転カウンタと、所定の回転の中でシャフトの角度位置を計測するように構成された角度位置センサとを含むことが可能である。回転数は、Mビットの分解能によって決定可能であり、1回転当たりの角度位置は、Nビットの分解能によって計測可能である。適切に選択されているので、回転カウンタは、比較的低い分解能として作動するように構成可能であるが、多回転検出装置は、全範囲にわたって1回転当たりNビットの角度分解能を維持することが可能である。したがって、多回転検出装置はM+Nビットの実効分解能を有することが可能である。
(もっと読む)
磁気−デジタル変換器、回転センサ及び回転角センサ
【課題】磁気抵抗の変化を従来技術に比較して小規模な回路で高精度なデジタル値として得ることができる磁気−デジタル変換器並びにそれを用いた回転センサ及び回転角センサを提供する。
【解決手段】磁気−デジタル変換器は、接地された接続点で互い接続された1対の磁気抵抗素子であって、上記接続点に接続された各第1の端子と、接地されない各第2の端子とを有し、磁界の変化を示す1対の信号を各第2の端子から出力する1対の磁気抵抗素子と、上記1対の磁気抵抗素子からそれぞれ出力される1対の信号をΔΣ変調して差動ΔΣ変調信号を出力するΔΣ変調手段と、上記ΔΣ変調手段からのΔΣ変調信号から上記磁界の変化を示すデジタル信号を取り出して出力するデジタルフィルタとを備えて構成される。
(もっと読む)
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム
【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
(もっと読む)
回転角度算出装置
【課題】誤差相関量εをゼロにフィードバック制御するための操作量として回転角度φを算出する場合、フィードバック制御によって回転角度φがハンチングする現象が生じえ、これにより、Z信号が誤って複数回出力されるおそれがあること。
【解決手段】比例ゲイン乗算部44では、誤差相関量εに比例ゲインKpが乗算され、積分ゲイン乗算部46では、誤差相関量εに積分ゲインKiが乗算される。積分ゲイン乗算部46の出力は、積分要素48に入力される。比例ゲイン算出部44の出力と積分要素48の出力との和が回転角度φである。回転角度φがZ信号に対応する基準角度θ0近傍となる場合、比例ゲインKpと積分ゲインKiとを低減する。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
エンコーダ装置及びエンコーダ装置のための補正方法
【課題】 内挿精度の低下を極力抑えて、検出対象物の回転角度又は移動位置を高精度で検出する。
【解決手段】 センサ部は、検出対象物の回転又は移動に応じて互いに90度だけ位相の異なる正弦波状のA相出力信号及びB相出力信号を出力する。A相出力信号の最大値VAmax及び最小値VAminに対してプラス90度の位置とマイナス90度の位置に対応する4つのサンプリング値VA1〜VA4を取得して、これらの平均値をオフセット値とする。B相出力信号に関しても、同様に、オフセット値を計算する。これらのオフセット値を用いて、A相出力信号及びB相出力信号のサンプリング値をオフセット補正した、検出対象物の回転角度又は移動距離を計算する。
(もっと読む)
レゾルバ装置
【課題】簡素な構造で信頼性を向上したレゾルバ装置を提供する。
【解決手段】レゾルバ装置は、螺旋状の凹凸により螺旋形状部が形成されたレゾルバロータと、レゾルバロータの回転により、螺旋形状部の凸部との距離が変わる位置に配置されたレゾルバステータと、を有する。例えば、レゾルバロータは、外周部に螺旋形状部を有する。あるいは、例えば、レゾルバロータは、中空円筒体であって、中空円筒体の内周部に螺旋形状部を有する。
(もっと読む)
回転位相検出装置、レゾルバ装置、駆動装置、回転位相検出回路、および回転位相検出方法
【課題】レゾルバを用いて検出する回転位相の温度ドリフトを抑制する。
【解決手段】回転位相検出装置1は、励磁巻線13,14に対する励磁受信巻線15の回転位相θに応じた電圧波形信号を、出力巻線17から出力するレゾルバ6と、出力巻線17に接続され、出力巻線17とは逆の温度特性の抵抗を有する補償抵抗回路21と、出力巻線17および補償抵抗回路21が直列に接続され、出力巻線17から出力された電圧波形信号が補償抵抗回路21を通じて入力され、入力される信号の電圧波形に基づいて回転位相を検出する検出部7とを有する。補償抵抗回路21は、レゾルバ6に設けられる。検出部7は、補償抵抗回路21を通じて入力される信号の電圧の大きさからレゾルバ6の温度を推定し、推定した温度に応じた補償量で、電圧波形信号に基づいて検出した回転位相θ(DTCT)に含まれる温度誤差Δθを補償する。
(もっと読む)
エンコーダ装置、及び駆動装置
【課題】検出精度を向上する。
【解決手段】エンコーダ装置は、被駆動体の位置に対応する信号を出力する検出部と、位置を示す第1位置情報を補正する補正値情報を記憶する記憶部と、被駆動体の位置に対応する信号に基づいて第1位置情報を生成し、生成した第1位置情報を、記憶部から読み出した補正値情報に基づいて補正する信号処理部とを備える。また、補正値情報は、位置に対応して測定された位置情報の誤差を示す誤差特性に基づいて生成された情報であって、誤差特性を所定の位置情報における複数の区間に分割し、分割した区間の境界ごとに、当該境界の前後の区間における誤差特性に基づいて生成された境界における近似値を平均して生成された誤差情報と、境界の位置を示す第2位置情報とが関連付けられた情報を有する。
(もっと読む)
角度検出装置
【課題】回転軸の角度検出を高精度にする。
【解決手段】一つの実施形態によれば、角度検出装置は、角度検出センサ、第1のAD変換部、第2のAD変換部、第1のオフセット補正部、及び第2のオフセット補正部が設けられる。角度検出センサは、回転機器の回転軸の角度検出を行い、第1の信号及び第1の信号と直交する第2の信号を生成する。第1のAD変換部は、第1の信号が入力され、第1の信号をアナログ・デジタル変換する。第2のAD変換部は、第2の信号が入力され、第2の信号をアナログ・デジタル変換する。第1のオフセット補正部は、第1のAD変換部から出力される第3の信号が入力され、第3の信号が所定値の範囲外のときに第3の信号をオフセット補正する。第2のオフセット補正部は、第2のAD変換部から出力される第4の信号が入力され、第4の信号が所定値の範囲外のときに第4の信号をオフセット補正する。
(もっと読む)
レゾルバ異常検出装置
【課題】簡潔で安価な回路構成にて、回転角の検出と異常検出とが互いに影響を与えることのないレゾルバ異常検出装置を提供する。
【解決手段】レゾルバ1の検出コイル12、13の両端間の電圧差が零となる零クロスのタイミングにて高調波成分を除去した略正弦波状のテスト信号の交流成分を抵抗Rs1、Rs2を介して検出コイル12、13の一端に加算する。検出コイル12、13の両端の電圧差を差動増幅して得た出力の零クロスのタイミングでの値から該検出コイル12、13のインダクタンスを求め、このインダクタンスの値からレゾルバ1の異常を検出する。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を検出することのできる装置を提供する。
【解決手段】本発明に係る回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たす機構を実現する実施例として、回転角検出装置は、第1回転軸から第n回転軸の隣接する回転軸間で、歯数(m±1)のギアが歯数mのギアと噛み合うギア機構が形成される。
(もっと読む)
位置速度制御装置
【課題】工作機械の主軸用の位置検出器として歯車と磁気式センサーを組み合わせた検出器では、機械に取り付ける状況により、振幅誤差、位相誤差が異なるため、位置検出器を機械に取り付けた状態で補正する必要がある。
【解決手段】回転位置に応じて出力される二相の正弦波信号A,Bの補正後の信号A’、B’は、A’=A−γa、B’=β(B−γb+A’・α)と表される。本実施形態では、速度制御時に速度指令値を積分した位置指令Plと位置検出値Pdとの差に基づいて、オフセット補正係数γbと位相補正係数α、振幅補正係数β、オフセット補正係数γaをそれぞれ算出し、これら補正係数に基づいて2相の正弦波信号A、Bを補正する。
(もっと読む)
1 - 20 / 81
[ Back to top ]