
Fターム[2F077TT52]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 方向判別 (172) | 2相信号によるもの (119)
Fターム[2F077TT52]の下位に属するFターム
方向信号の発生 (24)
Fターム[2F077TT52]に分類される特許
1 - 20 / 95
回転角度検出装置
回転電機
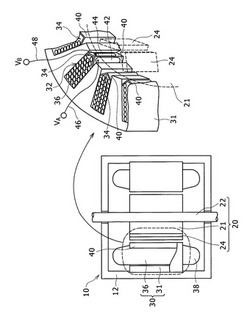
【課題】回転電機において、レゾルバを用いなくても回転子の回転角度等を検出できるようにすることである。
【解決手段】回転電機10は、予め定めた周方向配置に従って配置される複数の磁極を有するロータ20と、コイル巻線36を収容し、ロータ20に向かって開口部34を有する複数のスロット32を含むステータ30を備える。スロット32の開口部34には開口部用の絶縁体40が配置され、開口部用の絶縁体40には、ステータ30に対しロータ20が回転するときにロータ20の磁極からの磁束の変化に応じて発生する起電力を出力するセンサ導体42,44が設けられる。センサ導体42,44は、ロータ20の軸方向に垂直な断面からみて互いに異なる面方向を有する2つの導体で構成される。
(もっと読む)
エンコーダ信号処理回路

【課題】エンコーダ停止時の誤カウントなどを防止可能なエンコーダ信号処理回路を提供する。
【解決手段】エンコーダ信号のA相パルスとB相パルスからクロック同期のA相パルスとB相パルスを生成する回路と、クロック同期のA相パルスとB相パルスから4逓倍パルスを生成する4逓倍パルス生成回路と、クロック同期のA相パルスとB相パルスが交互に入力されているか否かに基づきエンコーダの停止時期を示す信号を作成する交互チェック回路と、前記エンコーダの停止時期以外に前記4逓倍パルスからノイズ除去済み4逓倍パルス信号を発生する回路とを有するエンコーダ信号処理回路。
(もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
相対角度検出装置および電動パワーステアリング装置
【課題】ハウジング外において電線に力が作用したとしても、ハウジング内の電線の端部に大きな力が及ばないようにする技術を提供する。
【解決手段】内外を連通する連通孔が形成されたハウジング内に収納され、互いに同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサと、相対角度センサから出力される電気信号をハウジング外に配置されるECUに伝送する電線と、ハウジングの連通孔に嵌合されて電線を保持するグロメット320と、ハウジングの外側に配置され、互いに結合されることで電線を屈曲させた状態で把持するキャップ400と、を備える。
(もっと読む)
磁気−デジタル変換器、回転センサ及び回転角センサ
【課題】磁気抵抗の変化を従来技術に比較して小規模な回路で高精度なデジタル値として得ることができる磁気−デジタル変換器並びにそれを用いた回転センサ及び回転角センサを提供する。
【解決手段】磁気−デジタル変換器は、接地された接続点で互い接続された1対の磁気抵抗素子であって、上記接続点に接続された各第1の端子と、接地されない各第2の端子とを有し、磁界の変化を示す1対の信号を各第2の端子から出力する1対の磁気抵抗素子と、上記1対の磁気抵抗素子からそれぞれ出力される1対の信号をΔΣ変調して差動ΔΣ変調信号を出力するΔΣ変調手段と、上記ΔΣ変調手段からのΔΣ変調信号から上記磁界の変化を示すデジタル信号を取り出して出力するデジタルフィルタとを備えて構成される。
(もっと読む)
集積回路、集積回路装置、回転検出装置
【課題】 検出された回転を割り込み信号として出力することでプロセッサーを間欠駆動させて、かつ、回転の停止期間に応じてセンサーのサンプリング周期を変えることで、効果的に検出システムの電力消費を抑える集積回路等を提供することができる。
【解決手段】 センサーから出力される第1のパルスと第2のパルス200A、200Bを用いて回転を検出する集積回路10であって、第1のパルスと第2のパルスに基づいて、正回転検出を行う第1の回路11および逆回転検出を行う第2の回路12の少なくとも一方と、第1のパルスと第2のパルスに基づいて回転停止期間をカウントする第3の回路13と、を含み、第1の回路11は、第1の割り込み信号211を出力し、第2の回路12は、第2の割り込み信号212を出力し、第3の回路は、回転停止期間を示す信号213を出力する。
(もっと読む)
レゾルバの異常検出装置
【課題】二乗和の値が上記正常範囲の内外にまたがって変動することがあっても、レゾルバの異常を正確に且つ安定して検出できるレゾルバの異常検出装置を提供することを目的とする。
【解決手段】レゾルバに異常が発生した場合に、正弦信号と余弦信号を読み込み、正弦信号及び余弦信号の読み込み値又はその二乗値からレゾルバの異常判定を禁止するかどうかを判定するようにし、レゾルバの異常判定を禁止しないと判定しているときには上記検査値が正常範囲を外れる度にカウント値を累積して増加させ、そのカウント値が所定値以上になったときにレゾルバが異常であるものと判断させるようにした。
(もっと読む)
磁気式エンコーダ
【課題】長さ寸法や角度などを測定する計測器具の用途に適した高精度・高信頼度でかつ安価な磁気式エンコーダを実現すること。
【解決手段】同一ピッチでN極とS極が交互に着磁されたテープ状磁気スケール部材を外周面に貼り付けて構成された磁気記録回転体と、磁気記録回転体に近接配置したA相、B相の磁気情報検出出力を出力する磁気情報検出手段とを有し、テープ状磁気スケール部材の両端部における出力信号の変化に基づいてZ相の信号出力が得られるようにした。また、磁気情報検出手段を適当な間隔で2個以上配設することで、磁気シート部材の貼り付け範囲の角度以上の回転角度の情報を得ることができるようにした。
(もっと読む)
回転方向検出機能付き回転数センサ
【課題】本発明は、回転数を検出することができるとともに、回転方向も検出することができる回転方向検出機能付き回転数センサを提供することを目的とするものである。
【解決手段】本発明の回転方向検出機能付き回転数センサは、第1の比較器36から得られる出力パルス信号の立ち上がりエッジ時点での第2の比較器37から出力される出力パルスレベルと、第1の比較器36から得られる出力パルス信号の立ち下がりエッジ時点での第2の比較器37から出力される出力パルスレベルとを比較する回転方向検出用比較器を設ける構成としたものである。
(もっと読む)
回転検出装置
【課題】第1センサ部の出力信号が所定レベルから変化しなくなる異常が生じている場合であれ、回転体の回転角度の変化量を的確に把握することができる。
【解決手段】クランクポジションセンサ42はクランクシャフト31が所定角度回転する毎にパルス状の信号を出力するメインセンサ61、サブセンサ62を有し、これらは互いに位相のずれた信号を出力する。サブ信号がハイレベルであり且つメイン信号が変化したとの条件が成立したときにこのときのメイン信号の変化方向に応じて異なるパルス幅のクランク信号を出力する。ECU41は、サブ信号がハイレベルから変化しなくなる異常が生じているか否かを判定し、同異常が生じている旨判定された場合にクランク信号のパルス幅と機関回転速度と上記異常時に出力されるクランク信号数との対応関係に基づき当該出力されるクランク信号数を正常時におけるクランク信号数に換算する。
(もっと読む)
レゾルバ信号処理装置
【課題】部品バラツキ、温度変化および電源電圧の変動がある状況でも、レゾルバが検出する角度の精度低下を極力防止できるレゾルバ信号処理装置を提供する。
【解決手段】実施形態によれば、マイコン21がレゾルバ2に正弦波状の励磁信号Srを出力して、ブラシレスDCモータ1の回転角度に応じて励磁信号Srの振幅が変調された余弦信号S3及び正弦信号S4する場合に、励磁PWM作成部25は、正弦波の最大振幅を規定する励磁DUTYが設定されると、その励磁DUTYに応じた比率で、正弦波の各位相に対する振幅の変化に応じてデューティが変化する励磁PWM信号を励磁信号S1として生成出力する。そして、励磁信号制御部24は、検出した励磁信号Srの最大振幅が所定のレベルとなるように励磁信号S1を調整する。
(もっと読む)
回転検出装置
【課題】倍信号異常が生じている場合であれ、欠歯部の通過の有無を的確に判定することができる。
【解決手段】クランクポジションセンサ42は、シグナルロータ51の歯52が通過する毎にパルス状の信号を出力するメインセンサ61、サブセンサ62を有し、これらは互いに位相のずれた信号を出力する。サブセンサ62のサブ信号がハイレベルであり且つメインセンサ61のメイン信号が変化したとの条件が成立したときに同条件の成立時におけるメイン信号の変化方向に応じて異なるパルス幅のクランク信号を出力する。ECU41は、クランク信号間の時間間隔に基づいて欠歯部通過判定を行なう。また、一つの歯52が通過する毎にクランクポジションセンサ42から二つの信号が出力される倍信号異常が生じているか否かを判定し、欠歯通過判定に際して、倍信号異常が生じている旨判定された場合とそうでない場合とで、欠歯部通過判定の判定態様を変更する。
(もっと読む)
センサ信号処理回路
【課題】2種類のセンサ信号を処理する回路を簡単化する。
【解決手段】回転体2の回転に追従して周期的に変化する第1センサ信号V1と、それと異なる位相で周期的に変化する第2センサ信号V2を処理する回路であり、兼用処理回路20と、第1保持回路10と、第2保持回路14と、第1センサ信号と兼用処理回路を接続する第1状態と、第2センサ信号と兼用処理回路を接続する第2状態の間で切り換わる第1スイッチ24a,24bと、兼用処理回路と第1保持回路を接続する第1状態と、兼用処理回路と第2保持回路を接続する第2状態の間で切り換わる第2スイッチ26a,26bと、時分割判定処理回路28を備えている。時分割判定処理回路は、第1センサ信号が低周波である間は第1スイッチと第2スイッチの両者を第1状態と第2状態の間で交互に切り換え、第1センサ信号が高周波である間は第1スイッチと第2スイッチの両者を第1状態に固定する。
(もっと読む)
センサ付き転がり軸受
【課題】1種類のリング磁石を使用して原点検出と回転速度検出を正確に行うことができるセンサ付き転がり軸受を提供する。
【解決手段】回転側輪2と、固定側輪3と、前記回転側輪2及び前記固定側輪3間に介在する転動体4と、円周方向に所定数のN極及びS極が交互にアキシアル着磁されたリング磁石11と、前記回転側輪2に固定されて前記リング磁石11を当該回転側輪と同軸に保持するマグネットホルダ12と、前記リング磁石11の軸方向端面と対向する第1の磁気感応センサ15Aと、当該リング磁石11の外径面と対向する第2の磁気感応センサ15Bとを保持する前記固定側輪に固定されたセンサハウジング16とを備え、前記マグネットホルダ12の前記フランジ部12dにリング磁石11の外径面の一部を外部に臨ませる原点検出用窓12eが形成されている。
(もっと読む)
エンコーダ校正装置
【課題】エンコーダにおいて内挿計算によって算出される内挿値に対しても高精度な校正を能率良く行えるようにする。
【解決手段】等速回転モータ(M)に連結された基準エンコーダ(E1)及び被校正エンコーダ(E2)それぞれから出力されるパルス信号(22a、22b)の時間差(δ)を測定する時間差測定回路(12)と、前記時間差に応じて被校正エンコーダの校正を行う演算処理部(18)とを備えるエンコーダ校正装置において、擬似正弦波信号をデジタル化するA/D変換器(24)を備え、演算処理部で擬似正弦波信号の完全な正弦波からの偏差に応じて被校正エンコーダの内挿計算によって算出される内挿値の校正も行う。
(もっと読む)
回転検出装置及び回転検出システム
【課題】エンコーダ等のセンサを設けることなく、直流モータの回転状態を精度良く検出できるようにすることを目的とする。
【解決手段】モータ2は、3相の各相コイルL1,L2,L3のうち第1相コイルL1と並列にコンデンサC1が接続された構成となっており、これにより、180°回転する毎にモータ回路のインピーダンスが二段階に変化する。制御部6は、モータ2をPWM制御にて駆動している。そのため、モータ2に流れる電流は、PWM制御による駆動スイッチMOSのON・OFFの切り替えに応じて脈動する。つまり、PWM制御によってモータ電流には交流成分が含まれることになる。また、回転に伴うモータ回路のインピーダンスの変化に応じて、その交流成分の振幅も変化する。そこで制御部6は、その交流成分の振幅変化に基づいて、モータ2の回転角や回転速度を検出する。
(もっと読む)
位置検出装置
【課題】トランスの原理を応用した従来のレゾルバをブラシレスモータの回転位置検出に用いる場合は、モータの回転軸とレゾルバのロータ側巻線との機械的位相角を一定の値にするための調整が必要であり、多数のモータの製造においてコストアップの要因となっている。
【解決手段】複数のホール素子を用いて、駆動用磁石の主磁極から直接、整流のための位置検出信号を得るブラシレスモータにおいて、ホール素子の検出信号を複数の正弦波とし、これらの検出信号からモータの回転位置情報を得ることを目的とした位置検出装置を提供する。
モータの回転軸に固定された駆動用磁石の磁束を直接検出するので、従来のレゾルバで必要であった機械的位相角の調整を不要とした。
(もっと読む)
エンコーダ装置
【課題】電気的ノイズに強い誤動作検出を行うことを可能にするエンコーダ装置を提供することを課題としている。
【解決手段】エンコーダ装置は、符号板と、符号板の相対位置を検出する相対位置検出部と、第1絶対位置符号を生成するパターン生成部と、符号板の絶対位置を示す第2絶対位置符号を検出する絶対位置検出部と、第1絶対位置符号から同一の論理状態を示す符号の位置から少なくとも2箇所の同一符号位置を選択する同一符号選択部と、第2絶対位置符号から同一符号位置に対応する位置の符号を判定する符号判定部と、同一符号位置によって示される第1絶対位置符号と、符号判定部が判定した符号とが同じ論理状態であるか否かを判定する判定部と、相対位置検出部又は絶対位置検出部において発生した検出異常の有無を判定する異常判定部とを備える。
(もっと読む)
1 - 20 / 95
[ Back to top ]