
Fターム[2F112CA12]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されていないもの (1,021) | 距離(位置)の検出 (895)
Fターム[2F112CA12]に分類される特許
81 - 100 / 895
撮像モジュール、撮像装置、画像処理装置及び画像処理方法。
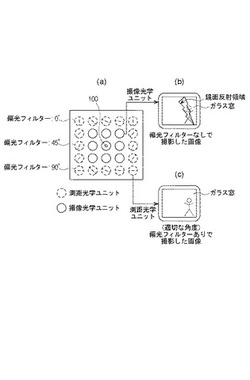
【課題】 複数の光学ユニットを有する撮像モジュールにおいて鏡面反射による影響を抑制することを目的としている。
【解決手段】 複数の光学ユニットを有する撮像モジュールであって、複数の光学ユニットのうちの少なくとも一部の光学ユニットに対して偏光フィルタを備え、偏光フィルタを備える光学ユニットにより得られる画像データに基づいて、被写体までの距離情報を推定する。
(もっと読む)
距離画像カメラおよび距離画像合成方法

【課題】単一の撮像部の画角よりも広い画角を有するとともに距離精度の高い距離画像を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】同一方向に向けて配置される複数のカメラユニット10A〜10Dと、これらの制御および取得される複数の距離画像に対する演算処理を行う演算制御ユニット15とを備える。各カメラユニット10は、対象物へ向けて光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報と前記反射光の強度を示す輝度情報とを画素毎に有する距離画像を取得する撮像部12とを有する。演算制御ユニット15は、第1距離区間探索部、最近接距離区間選択部、第2距離区間探索部、距離情報置換部、2次元位置補正部および距離画像合成部とを有しており、複数の距離画像を合成した際の距離データのばらつきなどを補正する。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
光波距離計
【課題】発光量調節に機械的駆動を用いず、かつ光量調節作業を繰り返すことなく受光光量が最適に調整される光波距離計を提供する。
【解決手段】所定の固定抵抗値を持つ抵抗器を抵抗値大から小にかけて複数設けて、演算処理部において、受光信号振幅を見ながらそのうちの一を光送出手段に選択的に負荷する構成とした。演算処理部において、信号変換手段に入力される受光信号振幅が、最大入力値以上と判定された場合には、最大入力値未満となるまで現段階の発光量より小さい発光量に下げるように信号選択を繰り返し、最大入力値以上と判定された場合には、最大入力値を超えない最大の発光量となるまで現発光量より大きい発光量に上げるように信号選択を繰り返すことで、断続的な複数パターンの発光量の中から最適な発光量が決定され、その信号選択回数は最大でも用意した抵抗器数と同じ回数で済み、光量調節作業が大幅に早くなる。
(もっと読む)
レーザレーダ装置及びレーザレーダ法
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
人体検知センサ及び自動水栓
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム
【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
光測距装置
【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、第1光源モジュール126および第2光源モジュール127によって、検出光L2の放射角度範囲において強度が変化する光強度分布を形成した際の受光部13の受光強度に基づいて対象物体ObのXY座標を検出する。第1光源モジュール126および第2光源モジュール127は、Z軸方向で離間しており、検出光L2の放射角度範囲において強度が一定の光強度分布を形成した際の受光部13の受光強度に基づいてZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間及び第2受光期間で受光するとともに、第2照射タイミングで照射された前記照射光の前記反射光を、第3受光期間及び第4受光期間でそれぞれ受光し、前記演算部は、前記第1受光期間〜前記第4受光期間で得られた光電子数を用いて、測距対象までの距離を算出し、前記第1受光期間及び前記第3受光期間は、前記反射光が前記固体撮像装置に到達してから該反射光の強度が最大になるまでの時間を含み、前記第2受光期間及び前記第4受光期間は、前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含む。
(もっと読む)
固体撮像装置
【課題】画素の駆動精度を低下させることなく、グローバルシャッタ動作の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子と、1つ以上のMOSダイオード構造を構成する電極を有する単位画素と、前記電極に第1電圧を供給する第1電圧源側に設けられた第1接点と、前記電極に前記第1電圧より高い第2電圧を供給する第2電圧源側に設けられた第2接点と、前記第1接点と前記第2接点との間に設けられた第1コンデンサと、前記第1接点及び前記第2接点のどちらか一方に接続することで、前記電極に印加させる電圧を、選択的に前記第1電圧又は前記第2電圧に切り換える切換スイッチと、前記切換スイッチを駆動させて交互に前記第1電圧と前記第2電圧とを前記電極に印加させることで、前記光電子の発生、保持、転送、リセット、及び排出のいずれかを行う画素駆動部とを備える。
(もっと読む)
情報処理装置、情報処理方法、および位置情報のデータ構造
【課題】対象物の動画像から応答性よく位置情報を取得する。
【解決手段】撮像装置12は第1カメラ22、第2カメラ24を含む。各カメラはそれぞれ、既知の幅を隔てた左右の位置から同じタイミング、同じフレームレートで対象物を撮影する。そして撮影した各フレーム画像を所定の複数の解像度の画像データに変換する。情報処理装置14の入力情報取得部26は、ユーザからの指示入力を取得する。位置情報生成部28は、ステレオ画像のデータのうち低解像度、広範囲の画像で対象物の領域または動きのある領域を対象領域としておよそ見積もり、当該領域のみ高解像度の画像でステレオマッチングを行い、対象物の3次元の位置を特定する。出力情報生成部32は、対象物の位置に基づき必要な処理を行い出力情報を生成する。通信部30は、撮像装置12に対する画像データの要求および取得を行う。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
81 - 100 / 895
[ Back to top ]