
Fターム[2F112DA04]の内容
Fターム[2F112DA04]の下位に属するFターム
レンズの組合せ (143)
非球面レンズ(シリンドリカルレンズ) (53)
Fターム[2F112DA04]に分類される特許
61 - 80 / 360
形状計測装置
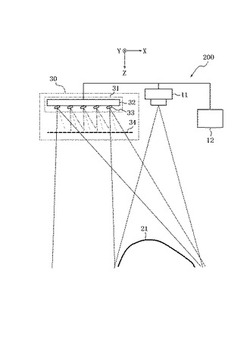
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
距離測定器及びその製造方法

【課題】低コストで製造され、小型で、検出する光量の損失が少なく、高精度に測定を行うことができる距離測定器を提供する。
【解決手段】光源1は、ホルダ81に固定され、レーザ光Lを射出する。有孔ミラー2は、光源1から射出されるレーザ光1の光軸に対して傾斜し、光源1からレーザ光Lを照射される照射領域Aが、光軸方向から見てレーザ光Lのファーフィールドパターンとなるように、ホルダ81に対して空間的に固定されたホルダ82に固定され、照射領域Aに、レーザ光Lに対して光学的に阻害がない透過部20を有する。走査部3は、透過部20を透過したレーザ光Lを、被測定物7に向けて反射させる。検出部5は、被測定物7において反射し、有孔ミラー2において反射したレーザ光Lを検出する。処理部6は、光源1及び検出部5の駆動を制御し、検出部5の出力に基づいて被測定物7までの距離を算出する。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
光学情報読み取り装置
【課題】読み取り速度を向上させることができる光学情報読み取り装置を提供する。
【解決手段】光学情報読み取り装置から撮像対象物の複数の点までの距離を測定し(ステップS1)、測定した距離に基づいて、受光センサが撮像した画像を複数の領域に分割する(ステップS2)。そして、分割した領域から読み取り領域を絞り込む(ステップS3)。距離により画像を複数の領域に分割することから、輝度変化やエッジに基づいて領域を分割する場合と異なり、QRコード(登録商標)に起因する輝度変化以外の種々の輝度変化が撮像対象物にあってもその影響を受けない。よって、QRコードを含む領域に精度よく絞り込むことができ、その後の読み取り処理をやり直す場合が低下するので、読み取り速度が向上する。また、領域の絞り込みの精度が向上することから、情報の読み取り精度も向上する。
(もっと読む)
光波距離測定装置
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
撮像装置
【課題】画角内の輝度差が大きい場合であっても正確なデプスマップを得られる撮像装置を提供する。
【解決手段】所定の焦点面の近傍に二次元状に配置された複数の正レンズと、複数の正レンズの各々に対応して当該正レンズの後側に配置された複数の受光素子を有する第1の撮像素子と、複数の正レンズの各々について、前記第1の撮像素子の出力から、当該正レンズに像が結ばれた被写体までの距離を表す値を算出する距離算出手段と、第1の撮像素子に複数回の撮像をそれぞれ異なる電荷蓄積時間で連続して行わせる制御手段と、前記第1の撮像素子により連続して行われた複数回の撮像の各々についてデプスマップを作成するデプスマップ作成手段と、デプスマップ作成手段により作成された複数回の撮像にそれぞれ対応する複数のデプスマップを合成して合成デプスマップを作成する合成手段と、を備える撮像装置。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
撮像モジュール
【課題】環境温度が変化しても距離の測定精度を確保できる。
【解決手段】レンズアレイ12はレンズと遮光部とを同一の板状部材に設けて構成している。これにより、環境温度の変化に伴って開口部の間隔も、レンズの基線長も、同じ変化量で変化するため、レンズアレイと遮光部との位置ずれは生じることはない。環境温度が変化するとレンズアレイ22の各レンズ15の基線長や遮光部16の間隔が同じ変化率で変化する。このため、各レンズ15の基調線の変化率は、撮像領域14によって各レンズを透過した光から得られた画像の視差の変化率と同じとなる。上述の測距演算式では当該各変化率は相殺される。これにより、環境温度が変化したとしても、上述の測距演算で精度良く距離を測定することができる。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
測距装置
【課題】簡素な構造で複雑な付加演算を必要とせず、高速応答可能で、かつ、スポット欠けによる誤測距を回避できる測距装置を提供する。
【解決手段】距離算出部20は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、受光素子4上の光スポットの位置を求め、この光スポットの位置に基づいて、受光素子4から測距対象物5までの距離を算出する。エラー検出部21は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、光スポットの形状を数値化し、この数値化された数値と予め定められた閾値とを比較して、この数値が予め定められた条件に従わないと、エラー信号を出力する。
(もっと読む)
光測距装置
【課題】作業者の作業精度に影響されることなく、可動部の揺動角度を高精度に校正する。
【解決手段】光を2次元走査する光走査部2と、光走査部2を駆動する駆動部3と、光ビームを投光する光源部4と、物体からの反射光を受光する受光部5と、投光及び受光タイミングに基づき物体までの距離を計測する測距部6と、投光タイミングと、入射光線ベクトルと、光走査部の2軸回りの各揺動振幅とを含む変換パラメータを用いて測距部6からの距離データを点群データに変換するデータ変換部7と、基準特徴度データと実測特徴度データとの誤差が閾値以内であるか否かを判定する判定部8と、誤差が閾値より大きい場合、各揺動振幅の実際の値を決定する第1及び第2駆動信号の電流値の少なくとも一方を、判定部8により誤差が閾値以内であると判定されるまで、変更設定可能な設定変更部9と、を備えて構成する。
(もっと読む)
体積検出装置、及び、体積検出方法
【課題】対象物の位置や姿勢、挙動等によって隠蔽部が生じることがあっても、シート上の対象物の体積を正確に検出することのできる体積検出装置、及び、体積検出方法を提供する。
【解決手段】対象物の距離画像データを距離画像センサ4で取得する。取得した距離画像データをデータ記録手段25に記録する。可視部分から推定される対象物の体積を現在体積算出手段24によって算出する。現在と過去の距離画像データを比較し、対象物の中で距離画像センサ4の位置から隠れている部分の体積を隠蔽体積算出手段26によって検出する。現在体積算出手段24で算出した体積と、隠蔽体積算出手段26で算出した体積と、を基に対象物の体積を算出する。
(もっと読む)
測距装置、測距方法および撮像装置、撮像方法
【課題】 カメラやビデオカメラ等において、被写体となる対象の距離を測定する測距装置、測距方法および同装置を備える撮像装置、撮像方法に関する。
【解決手段】 所定の間隔を設けて配置された複数の撮像素子と、各撮像素子上に測距の対象の像を結像させるレンズと、各撮像素子に設定される複数の測距エリアから結像に応じて出力される画像信号に基づいて、測距の対象までの距離を各測距エリアごとに算出する距離算出手段と、算出された距離の分布を生成する距離分布生成手段と、生成された距離の分布に基づいて測距の対象が存在する測距エリア内の位置を特定する測距対象位置特定手段と、を有する測距装置による。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
画像処理装置およびその方法
【課題】撮像データから被写体の実距離を高精度に推定する。
【解決手段】距離推定部200は、符号化開口を有する絞りを備えた撮像光学系を用いて撮像された撮像データを入力し、撮像データを撮像した前記撮像光学系の撮像パラメータを取得する。スペクトル計算部701は、撮像データのスペクトルを算出する。スペクトルモデル生成部702は、撮像パラメータおよび被写体距離に対応する光学特性情報、並びに、スペクトルモデルを用いて、撮像データに対応するスペクトルモデルである予測モデルを生成する。評価関数生成部707は、撮像データのスペクトルおよび予測モデルを使用して評価関数を生成する。距離推定部200は、評価関数から撮像データが表す画像に含まれる被写体の実距離を推定する。
(もっと読む)
画像処理装置およびその方法
【課題】撮像データから被写体の実距離を高精度に推定する。
【解決手段】距離推定部200は、点対称性をもたない開口を有する絞りを備えた撮像光学系を用いて撮像された撮像データを入力し、撮像データを撮像した前記撮像光学系の撮像パラメータを取得する。スペクトル計算部701は、撮像データのスペクトルを算出する。スペクトルモデル生成部702は、撮像パラメータおよび被写体距離に対応する光学特性情報、並びに、スペクトルモデルを用いて、撮像データに対応するスペクトルモデルである予測モデルを生成する。評価関数生成部707は、撮像データのスペクトルおよび予測モデルを使用して評価関数を生成する。距離推定部200は、評価関数および統計的手法を用いて、撮像データが表す画像に含まれる被写体の実距離を推定する。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
61 - 80 / 360
[ Back to top ]