
Fターム[2F112FA19]の内容
Fターム[2F112FA19]の下位に属するFターム
アナログで記憶するもの (2)
デジタルで記憶するもの (572)
Fターム[2F112FA19]に分類される特許
1 - 20 / 107
測距システム、画像処理装置、コンピュータプログラム及び測距方法
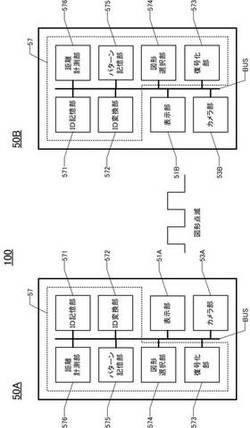
【課題】撮影部と表示部とを有する携帯端末で、それらの端末間の距離を計測する測距システムを提供する。
【解決手段】 測距システム(100)は、所定の時系列で所定の図形を表示する表示部(51B)を有する計測対象物(50B)と、所定の図形を撮影する撮影部(53A)と、撮影部(53A)により撮影された所定の図形と予め記憶された所定の図形の設計値とに基づいて、計測対象物から撮影部までの距離を計測する距離計測部(576)と、を備える。
(もっと読む)
対象物検出装置

【課題】光検出手段としてフォトダイオードやフォトトランジスタを用い、光検出手段と電極間とのインピーダンスから、測定対象物の電気特定及び光特性を同時に測定する対象物検出装置を提供する。
【解決手段】測定対象物20の方向に対して光を照射するLED3aと、照射した光の反射光を受光して電気的な信号に変換するフォトダイオード3bと、フォトダイオード3bに並列に接続し、所定の間隔で離隔配設される1対の電極2a,2bと、フォトダイオード3a及び電極2a,2bに接続する交流電源と、並列に接続されるフォトダイオード3a及び電極2a,2b間のインピーダンスを測定するインピーダンス測定部42と、測定対象物20の電気特性及び光特性に関する情報を予め記憶する対象情報記憶部45と、測定したインピーダンスの値と、記憶されている測定対象物20に関する情報とから、測定対象物20の材質及び/又は接近距離を判別する対象物判別部43とを備える。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
距離測定装置
【課題】光検出器のダイナミックレンジを簡易な構成で拡大することができ、測定対象物までの距離に拘らず、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、測定対象物で反射された反射光を集光する集光光学系と、一定の受光感度を有する複数の受光素子が被照射面内に配置された光検出器と、集光光学系と光検出器との間に配置された光量分布変換素子と、複数の受光素子から検出信号を取得し、取得された複数の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。光量分布変換素子は、被照射面において、複数の受光素子の各々が配置される位置に応じて、予め定めた光量分布が得られるように、集光光学系で集光された反射光の光量分布を変換する。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
位置特定装置、位置特定方法、及びプログラム
【課題】基準位置からのベースライン長を十分に確保できない位置での撮像画像を用いて行うステレオ視による対象物の位置特定の精度を向上させる。
【解決手段】撮像位置特定部1は、位置情報が既知である基準位置の当該位置情報と、当該基準位置で対象物を撮像して得た基準位置画像と、任意の撮像位置で当該対象物を撮像して得た撮像位置画像とに基づいて、当該撮像位置の位置情報の特定を行う。対象物位置特定部2は、既知位置の位置情報と、当該既知位置で当該対象物を撮像して得た既知位置画像と、当該撮像位置の位置情報と、当該撮像位置で該対象物を撮像して得た撮像位置画像とに基づいて、当該対象物の位置情報の特定を行う。なお、既知位置とは、撮像位置特定部1で位置情報が特定された撮像位置からの距離が前述の基準位置よりも大きい地点に位置しており、且つ、位置情報が既知である位置のことである。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が存在しない状態でも、光源部における発光強度に対応する強度の光をデフォルト光として受光部に入射させることができ、かかるデフォルト光の受光結果に基づいて、光源部での駆動電流と受光部での受光強度との関係を適正に初期設定することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、光源部12を点灯させた際の受光部30での受光結果に基づいて対象物体Obの位置を検出する。光学ユニット11のハウジング16の前側ハウジング部分163、164には、対象物体Obが存在しない状態でも、受光部30にデフォルト光DLを入射させるデフォルト光生成用反射部166、167が構成されている。従って、デフォルト光DLの受光結果に基づいて、光源部12での駆動電流と受光部30での受光強度との関係を適正に初期設定することができる。
(もっと読む)
光位相差検出式の物体検知センサ
【課題】
電気回路の温度ドリフト等による距離測定値が変動を補正し、数センチ単位の距離変動を検出することのできる光位相差検出式の物体検知センサを提供すること。
【解決手段】
検知領域に向けて検出光を投光する投光素子と、検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、検知領域内に物体が有ると判定する判定手段を備えた光位相差検出式の物体検知センサに、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段を加え、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正を実行させるようにした。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離を表す距離情報と、測定点毎の受光量を表す受光量情報と、を取得する光学式距離測定部と、受光量情報において、光量が閾値を超える測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、対象判定部によって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、当該ローカル座標系における位置と、同一の対象物のグローバル座標系における位置とに基づいて、較正を行う較正ステップと、を備える。
(もっと読む)
飛行時間撮像装置
【課題】飛行時間測定を使用した深度図を生成するための改良された解法に関し、特に飛行時間撮像装置およびより精度良い飛行時間撮像方法を提供する。
【解決手段】飛行時間撮像装置6のセンサ5の画素アレイ内の伝播遅延を考慮した、深度修正プロファイルは測定された深度図に応用される。前記深度修正プロファイルは、2つのn次元多項式の重ね合わせである。
(もっと読む)
クロマティック共焦点センサ光学ペン
【課題】スペクトルピーク信号のSN比を上げることができるクロマティック共焦点センサ光学ペンを提供すること。
【解決手段】 中央光束遮光開口要素208がクロマティック測距用のクロマティック共焦点センサ光学ペンに用いられる。中央光束遮光開口要素は、遮光板208Bにより、他の方法ではクロマティック共焦点センサ光学ペンを通過する光軸近傍の光を遮光する。これにより、光学ペンの有効光束の平均開口数が増加し、クロマティック共焦点センサシステムの分光器に光学ペンが与える対応するスペクトルピークの幅が小さくなり、全体の測定解像度が向上する。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
変位センサ
【課題】安定的なフィードバック制御が可能な変位センサを提供する。
【解決手段】制御部は、複数の画素の第2の方向Yに沿った複数の走査線T毎に受光信号を読み取り、該受光信号に基づいて得られる受光波形のピークに基づく光量レベル(ピーク値又は飽和画素の個数)を走査線T毎に検出し、複数設定された光量レベルの所定の範囲毎の走査線Tの個数をカウントし、その個数が最も多い光量レベルの範囲に基づいてフィードバック制御を行う。
(もっと読む)
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び電子機器
【課題】ユーザを撮像して得られる撮像画像に基づいて、ユーザまでの距離を精度良く検出する。
【解決手段】LED21aは、被写体に対して第1の波長の光を照射し、LED21bは、被写体に対して第1の波長とは異なる第2の波長の光を照射し、カメラ22は、第1の波長の光が照射されている被写体を撮像して第1の撮像画像を生成し、第2の波長の光が照射されている被写体を撮像して第2の撮像画像を生成し、2値化部43は、第1及び第2の撮像画像に基づいて、被写体の肌領域を検出し、座標検出部44は、第1及び第2の撮像画像上の肌領域における、対応する画素の輝度値どうしの差分絶対値に基づいて、被写体までの距離を算出する。本発明は、例えば、ユーザを撮像して得られる撮像画像から、ユーザまでの距離を算出するコンピュータ等に適用できる。
(もっと読む)
飛行時間範囲探知システムのための複数の同期化光源
TOFシステムの光パワーが、ワイヤレスとすることができる補助光放出器(WOE)ユニット、またはプラグ有線接続とすることができる補助光放出器(PWOE)を使用して増大される。WOEユニットは、放出されたTOFシステムの光エネルギーSoutを感知し、周波数および同位相に関してWOEによって受け取られるときのSoutに好ましくは動的に同期された光エネルギーSout−nを放出する。各WOEは、Soutを検出するための少なくとも1つの光センサーと、WOEの放出したSout−n光エネルギーの周波数および位相がTOFの放出したSout光エネルギーの周波数および位相に動的に同期されることを保証する内部フィードバックとを含む。PWOEユニットは内部フィードバックを必要としないが、PWOE放出の光エネルギーの周波数および位相とTOFシステムの一次光源によって放出されるものとを精密に一致させるようにTOFシステムによって較正される。PWOEが別個に使用される場合、PWOEとTOF一次光エネルギー光源との間の遅延差はソフトウェア補償することができる。  (もっと読む)
(もっと読む)
対象物特定システム、対象物特定装置、制御方法、及びプログラム
【課題】赤外線撮影手段が撮影した画像に基づいて対象物を特定すること。
【解決手段】対象物に設けられる赤外線放射体であって、赤外線放射量が異なる複数の領域を表面に有する赤外線放射体と、赤外線撮影手段300と電気的に接続された対象物特定装置110とを備え、対象物特定装置110は、赤外線撮影手段300が撮影した画像によって示される赤外線放射量の分布に、所定の異なる赤外線放射量の組合せの分布が含まれているか否かを判定する判定部114と、所定の異なる赤外線放射量の組合せの分布が含まれていると判定部114が判定した場合に、当該赤外線放射量の組合せのように赤外線を放射する複数の領域を表面に有する赤外線放射体が設けられている対象物を特定する対象物特定部115とを有する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】車載単眼カメラを用いて、道路上にある案内看板や標識など対象物との距離を高精度に測定できる距離計測装置及び方法を提供する。
【解決手段】距離計測装置は、単眼カメラが撮影した異なるフレームの画像が入力され、その画像から対象物を検出する対象物検出部101と、対象物の2フレーム以上の画像を蓄積する対象物検出結果蓄積部102と、検出した対象物の画像上の長さまたは画素数などを算出する対象物スケール算出部103と、対象物の向きを対象物の特徴点から算出する対象物向き算出部104と、算出した対象物の向きおよび入力される車速センサーの車速情報に基づいて、車両が対象物に指向する速度を算出する対象物指向速度算出部105と、算出した対象物指向速度および算出した対象物の画像上のスケールに基づいて、対象物までの距離を計算し出力する対象物距離算出部106とを有する。
(もっと読む)
1 - 20 / 107
[ Back to top ]