
Fターム[2F112FA35]の内容
Fターム[2F112FA35]の下位に属するFターム
ウインドウ発生 (100)
パターンマッチング (364)
形状特定のためのパラメータ抽出 (80)
Fターム[2F112FA35]に分類される特許
141 - 160 / 408
画像センサとその画像センサに用いられる受光装置
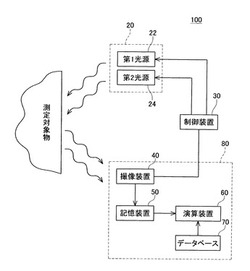
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
内視鏡装置

【課題】観察対象物と内視鏡遠位端部との距離を相対的に表示することが可能な内視鏡装置を得る。
【解決手段】スコープコントローラ231は、観察画像を仮想的に複数のメッシュに区分する。そして、メッシュの中心点Oに向けてレーザ光照射部215にレーザ光を照射させる。レーザ光受光部216は中心点Oからの反射光を受光して、反射光の位相を検出する。スコープコントローラ231は、照射したレーザ光と反射光との位相差を用いて、メッシュの中心点Oから遠位端部211までの距離を算出する。システムコントローラ301が、受信した距離に応じて、等距離線を作成し、表示画像に合成する。そして、表示画像を表示部400に表示させる。遠位端部211から最も距離が近い部位を取り囲む等距離線は、最も濃い色で描かれ、遠位端部211から距離が離れるにつれて等距離線を表す色が薄くなる。
(もっと読む)
空間情報検出装置
【課題】複数台の空間情報検出装置が存在する場合でも、独立して空間情報を検出する。
【解決手段】空間情報検出装置は、対象空間に投光する発光源2と、発光源2から投光する光の強度を変調する発光制御部3と、対象空間からの受光光量に応じた電荷を生成する光検出素子1と、光検出素子1の出力から対象空間に存在する物体Obまでの距離を求める距離演算部4とを備える。発光制御部3は、投光期間と休止期間とを設けるように発光源2を制御する。距離演算部4は、休止期間の電荷から環境光成分における変動成分の存否を判定する干渉判定部を備える。距離演算部4は、光検出素子1が受光する環境光成分のうち特定の2種類の位相区間の差分の積算値を所定の積分時間において求め、干渉判定部において積算値の差分が環境光成分の影響を受けていると判定した場合は当該差分を採用せず、差分が閾値以下の場合に当該差分を用いて空間情報としての距離を求める。
(もっと読む)
被写体距離推定装置
【課題】像倍率を変えずに合焦位置の異なる画像を得ることができ、光路長を長く取る必要がなく、演算量を低減でき、搭載機器の低背化、小型化を図ることが可能な被写体距離推定装置を提供する。
【解決手段】撮像レンズ111,121と、撮像レンズを通過した被写体像を撮像する撮像素子112,123と、撮像レンズ121と撮像素子123の光路中に挿入される高屈折率材料体122と、撮像素子112,123から得られた画像データを処理・解析する距離推定部13と、を有し、距離推定部13は、高屈折率材料体122の挿入によって、撮像素子に結像する被写体像の像倍率は略同一で合焦位置のみが異なる複数の撮像画像を取得し、その複数の撮像画像の焦点のボケ状態を比較することにより、被写体距離が予め定められた所定値以下であるか否かを判定する。
(もっと読む)
画像処理装置および画像処理方法
【課題】従来の画像処理装置の構成を大きく変えることなく、軽量でしかも小型な構成で被写体の距離情報を取得する。
【解決手段】画像処理装置は、回折格子と撮像光学系を介して得られる対象物体の像を撮像部を用いて撮像することにより得られた回折画像を取得し、回折画像の輝度勾配から実像を検出し、回折画像において、前記検出された実像と、この実像に対応する虚像との距離を算出し、第1算出手段で算出された距離を用いて対象物体と前記回折格子との奥行き距離を算出する。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】2以上の画像の間において対応点を迅速且つ精度良く探索することが可能な技術を提供する。
【解決手段】同一の被写体を各々とらえた第1画像と第2画像とを含む複数の画像を取得し、第1画像に対して第1および第2探索基準点を含む複数の探索基準点を設定する。次に、第2画像について第1探索基準点に対応する第1対応点と第2探索基準点に対応する第2対応点とを探索することで、第1画像と第2画像との間における第1探索基準点に係る第1視差および該第1視差に係る第1信頼度と第2探索基準点に係る第2視差および該第2視差に係る第2信頼度とを導出する。そして、第1視差、第1信頼度、第2視差、および第2信頼度に基づき、第1画像において第1探索基準点と第2探索基準点とによって挟まれる演算基準点について、第1画像と第2画像との間における推定視差を決定する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】対象物の検出誤差に起因する距離検出精度の劣化を十分に抑え、撮像した対象物との距離を高精度に計測する距離計測装置及び距離計測方法を提供する。
【解決手段】第1〜第3部位検出部101〜103は、対象物の撮像画像から、対象物に含まれる、サイズが既知である複数部位の部位画像を検出する。相対誤差比較部104は、部位検出部101〜103により検出された複数部位の画像サイズD1〜D3と、複数部位において既知であるサイズに関する情報とを用いて、画像サイズD1、D2、D3と画像サイズに含まれる誤差d1、d2、d3との割合である相対誤差d1/D1、d2/D2、d3/D3を最も小さくする部位画像サイズを選択する。距離推定部105は、選択された部位画像サイズを用いて対象物の距離を算出する。
(もっと読む)
撮像装置、画像処理装置及び距離計測装置
【課題】受動的方法による距離計測に利用できる撮像装置を提供する。
【解決手段】1つの広角レンズと複数のミラーを用いた撮像装置であって、広角レンズを囲むように、広角レンズの周囲に複数のミラーを配置するように構成されており、撮像対象を直接に撮像する1つの中央領域(実カメラ画像)と、広角レンズの周囲に配置された複数のミラーの反射像を撮像する複数の周辺領域(複数の仮想カメラ画像)を同時に1枚の画像中に撮像する。
(もっと読む)
画像認識装置及び車外監視装置
【課題】単純な構成で被写体の三次元画像を撮像し、撮像した画像から距離情報を有する距離画像を求め、求めた距離画像から被写体までの距離を計測する。
【解決手段】画像認識装置1の1つの撮像装置2で入射した光を水平偏光成分の光と垂直偏光成分の光に分離して水平偏光画像と垂直偏光画像を撮像し、撮像した水平偏光画像と垂直偏光画像を画像信号処理装置3で処理して偏光比画像又は偏光差分画像を生成し、生成した偏光比画像又は偏光差分画像から三次元の距離情報を有する距離画像を求め、視差ずれ補正などの処理を不要にして処理の簡略化して三次元の距離情報を得る。
(もっと読む)
校正目標検出装置と、校正目標を検出する校正目標検出方法と、校正目標検出装置のためのプログラム
【課題】記憶容量を増加せず、低コストで実現可能な校正目標検出装置を提供する。
【解決手段】校正目標検出装置200は、長尺状の測光領域を設定する測光領域設定部22と、測光領域の測光情報を検出する検出部21と、所定の一方向を長尺方向とする長尺状の測光領域が、一方向に直交する他方向に沿って走査され、当該他方向の測光情報の変化を示す第1プロファイルを生成すると共に、他方向を長尺方向とする長尺状の測光領域が、一方向に沿って走査され、当該一方向の測光情報の変化を示す第2プロファイルを生成するプロファイル生成部23と、第1プロファイル及び第2プロファイルの特徴点に基づいて車載カメラ20により取得された撮像画像に含まれる車載カメラ20の校正に用いられる校正目標の位置、または、当該校正目標の所定部位の位置を算定する位置算定部30と、を備える。
(もっと読む)
測距装置および撮像装置
【課題】 本発明は、測距装置および撮像装置に関し、偏光に起因する測距不能状態に対処することを目的とする。
【解決手段】 対物レンズの瞳と共役な面の互いに異なる位置に配置され、互いに偏光特性が異なる第1および第2の偏光素子と、前記第1の偏光素子を通過した第1の光束と前記第2の偏光素子を通過した第2の光束とを分離する偏光分離素子と、前記第1の光束による第1の像を撮像する第1の撮像素子と、前記第2の光束による第2の像を撮像する第2の撮像素子と、前記第1の像と前記第2の像との相対的なズレに基づいて焦点状態を検出する焦点検出手段とを備え、前記焦点検出手段は、前記焦点状態の検出が不能な場合に距離情報が得られない偏光物体領域を求めることを特徴とする。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
被写体距離計測装置
【課題】光路長を長く取る必要がなく、搭載機器の低背化、小型化を図ることが可能な被写体距離計測装置を提供する。
【解決手段】撮像レンズ111,121と、撮像レンズを通過した被写体像を撮像する撮像素子112,123と、撮像レンズ121と撮像素子123の光路中に挿入される高屈折率材料体122と、撮像素子112,123から得られた画像データを処理・解析する距離推定部13と、を有し、距離推定部13は、高屈折率材料体122の挿入によって、撮像素子に結像する被写体像の像倍率は略同一で合焦位置のみが異なる複数の撮像画像を取得し、その焦点のボケ状態の違いから被写体の距離を推定する。
(もっと読む)
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】一様な被写体で複数のカメラ映像間における対応点が複数存在する場合であっても、奥行値の誤推定を軽減することが可能な奥行推定装置を提供する。
【解決手段】奥行推定装置1は、基準映像と、複数の隣接映像とを入力する映像入力手段10と、仮定奥行値ごとに、基準映像の各画素の画素値と、当該画素の仮定奥行値の視差に対応する複数の隣接映像の各画素の画素値との差分絶対値である隣接映像差分値を演算する対応画素差分演算手段20と、隣接映像差分値を、基準映像の画素位置ごとに加算することで差分加算値を演算する隣接映像差分加算手段30aと、差分加算値を、仮定奥行値と基準映像の画素位置とに対応付けて記憶する記憶手段40と、画素位置ごとに、差分加算値が最小となる仮定奥行値を記憶手段40において探索し、当該画素位置の奥行値とする奥行値決定手段60と、を備えることを特徴とする。
(もっと読む)
距離計測装置、合成画像生成装置及び距離計測プログラム
【課題】移動する複数の被写体間の実空間上の距離情報を、簡素な構成で迅速に取得可能な距離計測装置、距離計測プログラムを提供することを目的とする。また、複数の被写体間の実空間上の距離情報を画像に合成表示することが可能な合成画像生成装置を提供することを目的とする。
【解決手段】本発明の実施形態に係る距離計測装置1は、複数の被写体を撮影する撮影手段10と、距離計測装置1からの実空間上の距離を、画像の水平座標に対応付けて計測する測距手段20と、画像を表示する表示手段30と、外部から、表示手段30に表示された画像上の被写体を指定する操作信号の入力を複数受け付け、この操作信号により指定された各指定位置の画像座標を順次取得する測距対象指定手段40と、この各指定位置の水平座標に対応付けられた各実空間上の距離に基づいて、指定された被写体間の被写体間距離を演算する距離演算手段50とを主に備える構成とした。
(もっと読む)
撮像装置及びその制御方法
【課題】装置の大きさやパノラマ合成といった犠牲を払うことなく、全方位撮影と距離測定とを行う。
【解決手段】全方位ステレオ撮像装置1は、距離撮像部10と全方位撮像部20とが機械式支持体30を介して垂直に配置されて構成されている。全方位撮像部20には、全方位ステレオ撮像装置1の水平方向の全方位を撮像可能となるように、6つの撮像部21a〜21fが全方位撮像部20の外周に沿って円周状に配置されている。距離撮像部10は、1つの撮像部11を備え、図示しないレンズの光軸が全方位撮像部20の所定の撮像部の光軸と平行となるように機械式支持体30に支持されている。全方位撮像部20により全方位画像を撮像することができ、距離撮像部10により視差画像を撮像し、被写体との距離を算出することができる。
(もっと読む)
移動体検出システム及び移動体検出方法
【課題】車両の周囲の移動体を検出する移動体検出システム及び移動体検出方法において、移動体検出の処理負担を軽減することにある。
【解決手段】移動体検出システムAは、外界カメラ20と、位置検出センサ21と、データベース11〜13と、位置検出センサ21により検出された車両の現在位置とデータベース11〜13により記憶された地物画像、距離画像、及び撮像位置とに基づいて、地物画像を車両の現在位置から見える画像に視点変換することにより、車両の現在位置の地物画像を作成して、外界カメラ20により車両の現在位置で撮像された撮像画像と車両の現在位置の地物画像とを差分処理して移動体を抽出する移動体抽出処理部25dと、車両の現在位置の距離画像を作成して、距離画像に基づいて、移動体抽出処理部25dにより抽出された移動体の接地部分までの距離を算出する移動体距離算出処理部25eとを備えている。
(もっと読む)
物体検出装置
【課題】距離検出手段が検出した距離データを的確にグループ化して物体を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、距離検出手段6の検出領域の区分dnごとに得られた距離データdpnをグループ化して物体を検出する物体検出手段11と、撮像された画像T上で隣接する複数の画素pを各画像データDに基づいて画素領域gに統合する統合処理手段10と、画像Tを距離検出手段6と同様に区分し、画像T中に占める物体の範囲内に存在する画素領域gの画像データに基づいて、範囲に属する区分dnごとに一つ以上の代表画像データDnを割り当てる割り当て手段12と、区分dnごとの代表画像データDnに基づいて距離データdpnのグループ化の閾値ΔXth、ΔZthを可変させる閾値可変手段13と、可変された閾値に基づいて再度距離データdpnをグループ化して物体の検出を行う再検出手段14とを備える。
(もっと読む)
141 - 160 / 408
[ Back to top ]