
Fターム[2F112FA35]の内容
Fターム[2F112FA35]の下位に属するFターム
ウインドウ発生 (100)
パターンマッチング (364)
形状特定のためのパラメータ抽出 (80)
Fターム[2F112FA35]に分類される特許
161 - 180 / 408
物体検出装置

【課題】距離検出手段が検出した距離データを的確にグループ化して物体を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、距離検出手段6の検出領域の区分dnごとに得られた距離データdpnをグループ化して物体を検出する物体検出手段11と、撮像された画像T上で隣接する複数の画素pを各画像データDに基づいて画素領域gに統合する統合処理手段10と、画像Tを距離検出手段6と同様に区分し、画像T中に占める物体の範囲内に存在する画素領域gの画像データに基づいて、範囲に属する区分dnごとに一つ以上の代表画像データDnを割り当てる割り当て手段12と、区分dnごとの代表画像データDnに基づいて距離データdpnのグループ化の閾値ΔXth、ΔZthを可変させる閾値可変手段13と、可変された閾値に基づいて再度距離データdpnをグループ化して物体の検出を行う再検出手段14とを備える。
(もっと読む)
空気調和機

【課題】熱画像上で検出された人体の詳細な奥行き方向の位置を考慮した精度のよい気流制御を行うことができる空気調和機を提供する。
【解決手段】この発明に係る空気調和機は、本体の前面に所定の俯角で下向きに取り付けられ、温度検出対象範囲を左右に走査して温度検出対象の温度を検出する赤外線センサと、赤外線センサにより人体や発熱機器の存在を検知して、当該空気調和機の制御を司る制御部とを備え、制御部は、赤外線センサを走査して部屋の熱画像データを取得し、部屋の奥行き方向の赤外線センサの視野角の中心座標に直立する人体の足元温度に相当する赤外線センサの出力を基準としたとき、部屋の奥行き方向の人体の立ち位置により変わる足元温度に相当する赤外線センサの出力の基準との差の基準に対する比率により人体の当該空気調和機からの奥行き方向の距離の詳細を求めるものである。
(もっと読む)
光学式変位計
【課題】種々の状況でピークレベルを適正に調整することが可能な光学式変位計を提供する。
【解決手段】第1の制御モードでは、光の走査の各往路および各復路において、ピークレベルが不適正になる毎にカウンタの値がインクリメントされる。すなわち、光の走査の往路および復路毎に、ピークレベルが不適正になる回数が記憶される。そして、1つの往路または復路においてピークレベルが不適正になる回数が一定回数以上になると、第2の制御モードに切り替えられる。
(もっと読む)
口腔内測定装置及び口腔内測定システム
【課題】装置のサイズを大きくすることなく、口腔内を高精度に測定することを可能にする口腔内測定装置及び口腔内測定システムを提供する。
【解決手段】口腔内の少なくとも歯を含む被測定物に光を照射する投光部と、前記被測定物で反射された光を集光させるレンズ系部と、前記レンズ系部が集光した光の焦点位置を変化させる焦点位置可変機構と、前記レンズ系部を通過した光を撮像する撮像部と、を備える。
(もっと読む)
距離計測装置及び距離計測方法
【課題】エッジ検出の精度に依存することなく高精度に距離を計算できるようにした、距離計測装置及び距離計測方法を提供する。
【解決手段】カメラ101、201、301と、カメラ101、201、301により取得された画像を用いて距離を算出するマイクロプロセッサ106、210とを有し、少なくとも3個以上のレーザ光を発生させるレーザ発生装置102、202、302と、レーザ発生装置の照射面とカメラのレンズ面とが同一面となるように配置される冶具103、203とを備えて構成する。
(もっと読む)
列車の停止検知システム並びに列車の移動速度及び位置検出システム
【課題】地上子位置からの列車の移動距離が長いと停止位置の検出精度が悪く、停止位置から反対方向への移動量に制限があり、また、列車の停止判定時に所定速度以下が検知できず数秒間の待ち時間によるタイムラグにより、ラッシュ時の列車の運転密度が低下する問題点があった。
【解決手段】列車の停止検知システムが、列車に搭載され画像信号を周期的に撮影する撮像部と、各駅の検出物体のテンプレート画像と、検出物体から停止位置までのオフセット距離を保持する検出物体情報保持部と、撮像部により撮影された画像から検出物体を検出して検出物体までの距離を元にして列車位置を検出する列車位置検出部と、撮影部により撮影された画像から列車の走行速度を検出する移動速度検出部と、列車位置検出部と移動速度検出部の結果を用いて列車が規定の停止位置に停車したことを判定する列車停止判定部とを有する。
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
キラルの光学系を備えた光学式距離計および結像装置
本発明は、光学式距離計に関係し、光学式距離計は、光検出部自身へ投影された画像を電子画像に変換する光検出部と、物体の画像を上記光検出部に投影する、上記光検出部上の画像を形成する入射した光ビームを調整する結像システムと、上記光検出部上の画像を形成する入射光を調整する光学系と、上記画像の空間スペクトルを提供する手段と、そして、上記画像の焦点ずれの程度に基づき、物体から当該光学式距離計までの距離を導き出す手段とを、備え、上記光学系は、焦点画像面に相関した光検出部上の画像の焦点ずれの程度が、結果として基準パターンに相関した上記画像の空間スペクトルの変位になるように、入射光を調整し、そして、上記距離計は、変位の上記程度から、焦点ずれの程度を導き出す手段を備えている。  (もっと読む)
(もっと読む)
距離測定器及び物体移動速度測定器
【課題】
カメラで撮影した画像内から人物や車両等の特定のオブジェクトを抽出し、該撮影したカメラと該抽出した特定のオブジェクトとの間の距離、または該抽出した特定のオブジェクトの移動方向及び速度を測定する。
【解決手段】
被写体からの光を所定の焦点距離に結像するレンズ群と、該レンズ群からの入射光を光電変換し画像信号を生成する撮像手段と、該画像信号から予め定められた特徴情報を含むオブジェクトを検出し該オブジェクトの一部またはすべてを含む領域の位置情報を生成するオブジェクト抽出手段と、前記画像信号と該位置情報を基に前記オブジェクトの一部またはすべてを含む領域に合焦させるとともに合焦時の焦点距離情報を算出するオートフォーカス手段と、該オートフォーカス手段からの焦点距離情報を基に前記レンズ群から前記オブジェクト抽出手段により抽出したオブジェクトまでの間の距離を算出する距離算出手段とで構成する。
(もっと読む)
マシンビジョンを用いたオブジェクトの3次元アライメントのためのシステムと方法
本発明はモデル化されたオブジェクトまたはシーンの3次元アライメントを決定するためのシステムおよび方法を提供する。校正後、3D(ステレオ)センサスシステムはオブジェクトを観測して、当該オブジェクトを包含するシーンの実行時3D表現を導出する。各ステレオヘッドからの修正画像は、それらのエッジ特徴を強調するために前処理される。次に少なくとも2個(1対)の前処理された修正画像で、所定の特徴を最初の画像上に特定し、次いで同じ特徴を別の画像中に特定することによりステレオマッチングプロセスが同時に実行される。各対のカメラについて3Dポイントが計算されて3Dポイントクラウドが導出される。3Dポイントクラウドは各カメラ対の3Dポイントをワールド校正からワールド3D空間に変換することによって生成される。ポイントクラウドからの3Dデータの量は、より高水準の幾何学形状(HLGS)、たとえば線分を抽出することによって削減される。実行時に検出されたHLGSがモデルのHLGSに対応させられて、候補3D姿勢を生み出す。粗い採点で姿勢の数を減らす。さらに残った候補姿勢は一層精緻なプロセスに入れられる。次にこれらの残った候補姿勢は、たとえば候補姿勢の検出された3Dまたは2Dポイントをより大きいセットの対応する3次元または2次元モデルポイントに適合させることによって検証され、その場合に最も近いマッチが最良の精緻な3次元姿勢である。 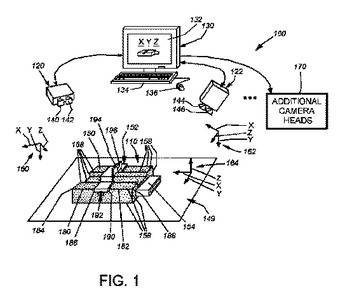 (もっと読む)
(もっと読む)
高解像度三次元撮像のシステムおよび方法
本発明の実施形態は、広い視野および精密なタイミングを用いた三次元撮像のためのシステムおよび方法を提供する。一側面によれば、三次元撮像システムは、広い視野を有する現場を照射するのに十分な発散で光パルスを放出するように構成される、照射サブシステムを含む。センササブシステムは、場面によって反射または散乱された光パルスの部分を広い視野にわたって受容するように構成され、時間の関数として、受容された光パルス部分の強度を変調し、変調された受容された光パルス部分を形成するように構成される、変調器と、受容された光パルス部分に対応する第一の画像、および変調された受容された光パルス部分に対応する第二の画像を生成するための手段とを含む。プロセッササブシステムは、第一および第二の画像に基づいて、三次元画像を取得するように構成される。  (もっと読む)
(もっと読む)
物体検出装置および情報取得装置
【課題】目標領域に投射された光を適正に受光でき、よって、目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、所定波長帯域の光を出射するレーザ光源11と、レーザ光源11からの光を目標領域に向けて投射する投射レンズ12と、目標領域から反射された反射光を受光して信号を出力するCMOSイメージセンサ16と、反射光をCMOSイメージセンサ16へと導く撮像レンズ14と、レーザ光源11からの光を透過させるためのフィルタ15を具備し、さらに、フィルタ15を傾けるアクチュエータ50を有する。フィルタ制御回路26は、透過波長帯域がレーザ光源11からの光の波長帯域に近づくよう、フィルタ15を傾ける。
(もっと読む)
混雑検知装置
【課題】混雑度をより正確に把握することが可能な混雑検知装置を提供する。
【解決手段】エスカレータ10の乗降口等に、手すり12や床面14を含まない範囲で監視空間16を設定し、上方に設置された2台のカメラ18,20で撮影された画像から、監視空間16内の人物集団の三次元形状および/または人物集団の動きを表わす複数のベクトルを決定し、それに基いて体積占有率および/または三次元フローを算出して混雑度を判定する。
(もっと読む)
カメラで撮影した画像を用いた視程判別システム
【課題】既存のインフラ(ITVカメラやWEBカメラ)を有効利用して、視程障害発生時に画像を解析処理し、定量的な視程値として算出し、道路管理に用いる。
【解決手段】視覚刺激を定量化するMichelsonコントラストを利用して、ITVカメラやWEBカメラ画像の任意に示した一定空間のコントラスト差により視程値を定量的に求め、速度規制や道路規制の自動制御システムのセンサーとして活用する。
(もっと読む)
距離情報取得装置、撮像装置、及びプログラム
【課題】所望のシーンにおける被写体距離情報を高速且つ高精度に取得することが可能な距離情報取得装置、撮像装置、及びプログラムを提供すること。
【解決手段】互いに異なる複数の焦点位置での撮像で取得された複数の画像データについて、所定位置の画素を含むカーネル領域を設定し、該カーネル領域内の画素を対象として画像処理を実行して前記複数の画像データ間のぼけの相関量を算出して撮像対象の被写界までの距離を表す距離情報を算出するDFD測距手段を具備する距離情報取得装置に、被写界を写した画像データを複数の測距対象領域に分割する測距領域分割手段と、前記被写界領域を示す画像データ上に設置する総測距点数を決定する測距点数制御手段と、各々の前記測距対象領域に設置する測距点密度を決定する制御手段と、前記総測距点数及び前記測距点密度に基づいて、前記測距対象領域に測距点を配置する測距点設置手段と、を具備させる。
(もっと読む)
撮像装置及び半導体回路素子
【課題】高速で高精度な視差演算を可能とする撮像装置を提供する。
【解決手段】複数のレンズ部と、それらのレンズ部に一対一に対応して設けられ、光軸方向に対して略垂直な受光面有する複数の撮像領域と、生成された撮像信号の入力を受ける撮像信号入力部133と、撮像信号入力部133へ転送される撮像信号の転送範囲を決定する転送範囲決定部144と、転送範囲決定部144により決定された転送範囲に応じた撮像信号を撮像信号入力部133へ転送するように前記撮像領域を駆動する撮像領域駆動部132と、撮像信号入力部133に転送された撮像信号に基づき視差を演算する視差演算部142とを備えており、転送範囲決定部144は、前記複数の撮像領域のうち少なくとも2つの撮像領域で生成される撮像信号を転送範囲と決定する第1の動作モードと、第1の動作モードとは異なる撮像信号を転送範囲と決定する第2の動作モードとを切り替える。
(もっと読む)
高速光学コード読取
光学コードリーダにおいて、少なくともAGC処理とオートフォーカス制御のうちの選択された一つが光学コードのデコードと並行して実行される。選択された処理は、デコードを開始するどの信号よりも先に開始されるとよい。選択された処理はまた、デコードを開始するどの信号からも独立して周期的に実行されるのがよい。実施形態においては、デコードと選択された処理とは、並行動作する異なる第1及び第2のプロセッサによってそれぞれ実行され、第2のプロセッサは選択された処理を実行し、第1のプロセッサは選択された処理の実行に対していかなる制御も行わない。 (もっと読む)
物体形状評価装置
【課題】測定装置の測定技術上の条件から、特定の測定領域でその測定誤差が大きくなるような場合においても測定点群と基準点群との合同変換が適正に行われ、その結果、測定対象物の物体形状評価が適正に行われる物体形状評価装置を提供する。
【解決手段】 測定対象物の形状に対応する多数の測定点と、測定対象物の基準形状に対応する多数の基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせし、位置合わせ後の測定点データと基準点データとに基づいて測定対象物の形状を評価する物体形状評価装置。位置合わせ処理において、隣接する前記測定点の間の隣接点間距離又は隣接する前記基準点の間の隣接点間距離に基づいて隣接点間距離重み係数を決定し、当該隣接点間距離重み係数が逐次収束処理における逐次収束評価値を求める際に用いられる。
(もっと読む)
距離計測装置および距離計測方法
【課題】観測領域に存在する物体までの距離を確実に計測することができる距離計測装置および距離計測方法を提供する。
【解決手段】車両前方の観測領域に対して投光器10から空間パタン光を照射して、この空間パタン光を照射した観測領域の画像をカメラ20で撮像する。このカメラ20の撮像画像を演算ユニット30に入力し、その撮像画像上の各ドットパタン光をデコードしてその照射方向を検知するとともに、各ドットパタン光の画像上の座標位置からその撮像方向を検知する。そして、カメラ20の撮像画像上の各ドットパタン光の照射方向と、各ドットパタン光の撮像方向と、投光器10とカメラ20との相対位置関係とに基づいて、三角測量の原理により、観測領域に存在する物体までの距離を計測する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】位相シフト法を用いて測距を行う際に、誤測距を防止する。
【解決手段】照射部16が、強度が周期的に変化する縞パターン光を、パターンの位相をπ/2ずつ移動させつつ被写体に照射する。撮像部2が縞パターン光の移動の周期における0、π/2、π、3π/2の4つの位相において反射光を受光して受光信号F1,F2,F3,F4を得る。距離画像生成部31が、第1の加算信号(F1+F3)と第2の加算信号(F2+F4)との差分値の絶対値を算出し、絶対値をしきい値Th1と比較し、絶対値がしきい値Th1未満となる受光信号を取得した受光素子においてのみ距離情報D1を算出する。
(もっと読む)
161 - 180 / 408
[ Back to top ]