
Fターム[2F112FA35]の内容
Fターム[2F112FA35]の下位に属するFターム
ウインドウ発生 (100)
パターンマッチング (364)
形状特定のためのパラメータ抽出 (80)
Fターム[2F112FA35]に分類される特許
101 - 120 / 408
撮像装置

【課題】複数台の撮像装置を使用して、カラーの合成画像と距離情報を得ることができる撮像装置において、解像度の低下を招くことなく感度を向上し、さらには多くの色情報の取得が可能な撮像装置を提供する。
【解決手段】カラー画像を取得するとともに、被写体までの距離情報を取得するために、入射した光を光電変換して画像信号を出力する2系統の撮像素子と、2系統の画像信号に基づき被写体までの距離情報を求める距離情報取得部と、2系統の画像信号を合成してカラー画像を得る合成部とを備える撮像装置であって、撮像素子のうち第1の撮像素子は透明画素と光の3原色のうち第1の原色画素と第2の原色画素とを一組とした画素構成を有し、第2の撮像素子は透明画素と光の3原色のうち、第3の原色画素と、第1または第2のいずれかの原色画素とを一組とした画素構成を有している。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム

【課題】複数の画像を対象とした対応点の探索処理における精度の維持と速度の向上とを両立させることが可能な対応点探索技術を提供する。
【解決手段】次の処理が行われる。第1画像の第1領域が第1周波数成分情報に変換されるとともに、第2画像の第2領域が第2周波数成分情報に変換される。第1および第2周波数成分情報に基づき、第1領域と第2領域との相関を示す第1相関値が算出される。第1相関値に基づき、相関演算部での演算における周波数成分情報の使用が制限される周波数の使用制限範囲が設定される。第1画像に対応する第3画像の第3領域が第3周波数成分情報に変換されるとともに、第2画像に対応する第4画像の第4領域が第4周波数成分情報に変換される。第3および第4周波数成分情報のうちの使用制限範囲外の周波数に係る周波数成分情報に基づき、第3領域と第4領域との相関を示す第2相関値が算出される。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、レーザ光を前記目標領域に向けて投射する投射光学系10と、前記目標領域からの反射光を受光して信号を出力するCMOSイメージセンサ125とを有する。レーザ光が出射されたときにCMOSイメージセンサ125から出力される第1の撮像データから、レーザ光が出射されていないときにCMOSイメージセンサ125から出力される第2の撮像データが減算され、減算結果が、メモリ25に記憶される。3次元距離演算部21cは、メモリ25に記憶された減算結果に基づいて、3次元距離情報を演算し取得する。
(もっと読む)
測距装置及び測距方法
【課題】測定対象物までの距離の測定精度を向上させる。
【解決手段】LDモジュール11,12は、原点から所定の位置の平面S1上において、z軸を中心とする対称位置に2つの投光スポットP2,P1が形成されるように、光を投光する。カメラ13は、z軸方向に配置された測定対象物上に、LDモジュール11,12が投光することにより形成された2つの投光スポットを受光する。距離取得部14は、原点から4mの位置における投光スポットP1,P2の位置関係と、カメラ13が受光することによって得られた測定対象部上の2つの投光スポットの位置関係を比較し、比較結果に基づいて、原点から測定対象物までの距離を取得する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】テンプレートマッチングによる対応点探索を行なうステレオマッチング手法において、隠れ領域が存在する場合でも簡易な処理で精度の高いマッチングを行なう。
【解決手段】境界画素指定部21は、被写体の影響によって第1の画像および第2の画像のいずれかにおいて写っていない領域である隠れ領域といずれにも写っている領域である非隠れ領域との境界に対応する1または複数の画素である境界画素を第1の画像および第2の画像においてそれぞれ指定する。相関計算範囲決定部22は、第1の画像および第2の画像における各境界画素に基づいて相関計算範囲を決定する。相関計算部13は、第1の画像における複数のブロック画像と第2の画像における複数のブロック画像との間のすべてまたは一部の組み合わせごとに、相関計算範囲に従って画素値の相関係数を算出する。
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第1の画像データの少なくとも1つの領域内の第1のシャープネス情報および前記第2の画像データの少なくとも1つの領域内の第2のシャープネス情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。 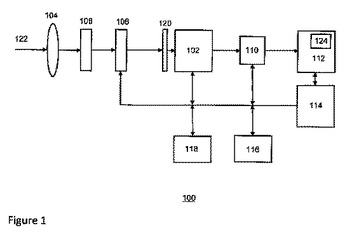 (もっと読む)
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び電子機器
【課題】ユーザを撮像して得られる撮像画像に基づいて、ユーザまでの距離を精度良く検出する。
【解決手段】LED21aは、被写体に対して第1の波長の光を照射し、LED21bは、被写体に対して第1の波長とは異なる第2の波長の光を照射し、カメラ22は、第1の波長の光が照射されている被写体を撮像して第1の撮像画像を生成し、第2の波長の光が照射されている被写体を撮像して第2の撮像画像を生成し、2値化部43は、第1及び第2の撮像画像に基づいて、被写体の肌領域を検出し、座標検出部44は、第1及び第2の撮像画像上の肌領域における、対応する画素の輝度値どうしの差分絶対値に基づいて、被写体までの距離を算出する。本発明は、例えば、ユーザを撮像して得られる撮像画像から、ユーザまでの距離を算出するコンピュータ等に適用できる。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
距離情報抽出方法及び該方法を採用した光学装置
【課題】距離情報抽出方法及び該方法を採用した光学装置を提供する。
【解決手段】数学的に理想的な波形ではない実際の非線形的波形を考慮し、光学装置と被写体との間の距離を決定する方法及び装置が開示され、該方法と装置は、被写体に投射された波形の類型の制限を受けることなく正確な距離情報を抽出でき、歪曲及び非線形性がほとんどない高価の光源や光変調素子を使用する必要がなく、複雑な誤差補償手段が要求されない。また、既存の光源、光変調素子及び光学装置をそのまま利用でき、追加コストがかからない。さらに、あらかじめ計算された距離情報が保存されているルックアップテーブルを使用するために、距離情報を抽出するにおいて演算量が非常に小さいので、リアルタイム距離情報映像の撮影が可能である。
(もっと読む)
撮像装置
【課題】撮像素子により撮像された遮光壁の輝度情報に基づいて、各レンズの位置を計算することで温度変化による影響を取り除いて、環境変動に強い撮像装置を提供する。
【解決手段】この撮像装置50は、被写体(図示せず)に対向する位置に配設され、複数のレンズ1a、1bをアレイ状に配列したレンズアレイ1と、レンズアレイ1の像面側に設けられ、複数のレンズにより結像された被写体の縮小像(以下、個眼像と呼ぶ)の集合である複眼像を撮像するCMOSセンサ(撮像素子)4と、CMOSセンサ4により撮像された複眼像を処理する演算器10と、レンズアレイ1を構成する隣接する各レンズ間での光線のクロストークを防止する遮光壁2と、を備えて構成されている。
(もっと読む)
マルチフォーカス検査装置及びマルチフォーカス検査方法
【課題】 マルチフォーカス検査装置及びマルチフォーカス検査方法に関し、1回のスキャンで高速且つ高精度の全面外観検査を可能にする。
【解決手段】 測定対象物を撮像する測定ヘッドと、前記測定対象物と前記測定ヘッドを平面内において互いに相対的に移動させる移動機構と、前記測定対象物に光を照射する光源とを備え、前記測定ヘッドは、前記測定対象物に対向して配置された撮像レンズと、前記撮像レンズの合焦面が、前記測定対象物の移動方向に対して直交する平面内或いは前記直交する平面から±45°の範囲内で前記測定対象物の移動方向に傾斜させた平面内に存在するように調整する光学部材と、前記光学部材からの光の結像位置に焦点面が位置するよう配置したイメージセンサとを少なくとも有する。
(もっと読む)
内視鏡装置
【課題】照射光を被観察部に照射する内視鏡挿入部を備えた内視鏡装置において、撮像中においても内視鏡挿入部の先端と被観察部との間の距離情報を簡易な構成で取得する。
【解決手段】被観察部の近傍に設置される処置具に設けられたマークの像Mを撮像し、その撮像されたマーク画像の大きさに基づいて、内視鏡挿入部先端と被観察部との距離情報を取得する。
(もっと読む)
距離計測装置、距離計測方法、及びプログラム
【課題】テクスチャ情報の少ない被写体を高密度に距離計測することを目的とする。
【解決手段】光源から照射される光が投影光学系のレンズを透過する透過率を空間的に符号化する符号化素子を含む投影部と、投影部により光が投影された距離計測対象を撮像する撮像部と、撮像部により撮像された撮像画像と、予め定められた距離ごとに撮像部により予め撮像された複数のキャリブレーション画像との類似度を示す相関値を算出する算出部と、算出部により算出された相関値が最大となるキャリブレーション画像に対応する距離を距離計測対象までの距離として決定する決定部と、を備える。
(もっと読む)
物体検知装置
【課題】可動部がなく耐久性や信頼性が高く、広範囲の対象空間を設定することを可能にしながらも投光に要するエネルギーを低減可能な距離センサを提供する。
【解決手段】発光源1は、強度が時間経過に伴って変化する変調光を投光する。演算処理部7は、発光源1による投光から撮像素子2による受光までの時間差に相当する情報を変調光の時間変化と撮像素子2の各受光領域での受光強度とから抽出し、距離を画素の値とする距離画像を生成する。発光源1の前方には、変調光をスリット光として対象空間に投光するスリット光形成部3bと、変調光をスポット光として対象空間に投光するスポット光形成部3cとを備えた投光光学系3が配置される。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 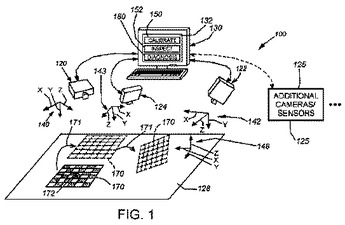 (もっと読む)
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】撮影対象空間内の対象物に応じて、効率よく高い品質の距離画像を得る。
【解決手段】光電変換素子で受光した受光量に応じた電荷量から各画素の強度値を算出し、強度が所定以下の画素についてのみ補正を行う。補正は、同一画素の電荷量を時間方向に過去に遡り加算することにより行う。加算は、加算後の電荷量から算出した強度値が所定以上となるまで行う。そして、補正後の電荷量から、距離値を算出し、距離画像を生成する。
(もっと読む)
距離画像入力装置と車外監視装置
【課題】画角が等しく、それぞれ異なる距離に焦点があった複数のステレオ画像ペアを取得して距離精度と位置精度が高い距離画像を検出する。
【解決手段】撮像装置2で被写体を撮像して、それぞれ異なる距離に焦点があった複数のステレオ画像を出力する。演算処理ユニット3の視差検出部13は撮像装置2から出力する各ステレオ画像の焦点が合う距離の範囲に基づいて視差を計算して視差情報を有する複数の視差画像を出力し、この複数の視差画像を視差合成部14で合成して合成視差画像を出力する。距離算出部15は視差合成部14から出力する合成視差画像から被写体までの距離を算出して距離画像を出力する。
(もっと読む)
物体の改善されたステレオ画像を得る方法およびシステム
注目の物体のステレオ画像に関する改善された深さ精度を得る方法であって、
第1の位置から注目の物体の第1の画像を撮像すること、
第1の位置とは異なる第2の位置から注目の物体の第2の画像を撮像することを含み、
第1の画像および第2の画像に基づいて、注目の物体に関する深さの概略推定を求めること、
深さの概略推定に基づいて、注目の物体に関する改善された深さ精度に対応する改善された撮像位置のセットを求めること、
改善された撮像位置のセットから改善された画像を撮像すること、
改善された画像に基づいて改善された深さを求めること
を含む方法を開示する。
関連するシステムも説明している。  (もっと読む)
(もっと読む)
撮像装置
【課題】撮影対象となる被写体の状態が変化することなく、投光状態の異なる画像を取得することができる撮像装置を提供する。
【解決手段】 被写体Xを投光する投光手段5と、被写体Xを撮影して画像データを取得する撮像手段3と、投光手段5の投光タイミング及び撮像手段3の撮影タイミングを制御するタイミング制御手段6と、取得した画像データを蓄積する画像データ蓄積手段7と、該画像データ蓄積手段7に蓄積された画像データをコンピュータ11へ転送するインターフェース12と、を備え、タイミング制御手段6は、撮像手段3に連続撮影させるとともに、投光手段5による投光状態を連続撮影に同期させて切り替え、画像データ蓄積手段7は、連続撮影された画像データを蓄積し、連続撮影が終了すると、画像データ蓄積手段7に蓄積された画像データをインターフェース12を介してコンピュータ11へと転送する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1BK及び光入射面1BKとは逆側の表面1FTを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備える。フォトゲート電極PGは、表面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から光入射面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
101 - 120 / 408
[ Back to top ]