
Fターム[2F112FA35]の内容
Fターム[2F112FA35]の下位に属するFターム
ウインドウ発生 (100)
パターンマッチング (364)
形状特定のためのパラメータ抽出 (80)
Fターム[2F112FA35]に分類される特許
21 - 40 / 408
撮像装置
【課題】 被写体をステレオ撮影時にズーム調整が可能であり、撮影したステレオ画像から被写体の3次元位置情報を高精度で取得できる撮像装置を実現する。
【解決手段】 被写体を第1の方向から撮像する第1の撮像手段と、被写体を第1の方向とは異なる第2の方向から撮像する第2の撮像手段とを備え、第1の撮像手段により撮像された第1の画像と、第2の撮像手段により撮像された第2の画像を用いて、被写体の3次元位置情報を取得する撮像装置であって、撮像装置は、第1の画像および第2の画像をズーム調整して結像させるズーム光学系を有し、ズーム光学系は、焦点距離を検出する焦点距離検出手段を有することを特徴とする。
(もっと読む)
撮像装置および距離情報取得方法

【課題】撮影画像各部における被写体までの距離を正確に把握し、距離に基づきぼかし処理を施す。
【解決手段】測光スイッチS1がオンされると(S100)、レンズを駆動し複数の位置に焦点を合せながら各位置でのスルー画像をメモリに記憶する(S102)。AF処理における合焦位置にフォーカス(S104)する。レリーズスイッチS2がオンされると同合焦位置で主画像の撮影を行う。記憶された複数のスルー画像の各々を手ブレに応じた大きさの領域に分割し、撮影画像における各領域に対応する被写体までの距離情報を把握し、距離マップを作成する(S114)。距離マップに基づきマスクを作成し(S116)、被写体までの距離に応じたぼかし処理を施す(S118)。
(もっと読む)
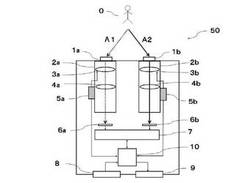
測距システム、画像処理装置、コンピュータプログラム及び測距方法
【課題】撮影部と表示部とを有する携帯端末で、それらの端末間の距離を計測する測距システムを提供する。
【解決手段】 測距システム(100)は、所定の時系列で所定の図形を表示する表示部(51B)を有する計測対象物(50B)と、所定の図形を撮影する撮影部(53A)と、撮影部(53A)により撮影された所定の図形と予め記憶された所定の図形の設計値とに基づいて、計測対象物から撮影部までの距離を計測する距離計測部(576)と、を備える。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
障害物検出方法及び障害物検出装置
【課題】レーザ光の照射効率を向上させるとともに、垂直方向の分解能を向上させることができる障害物検出方法及び障害物検出装置を提供する。
【解決手段】レーザ光を投受光するレーザレーダ1を設置する設置工程(SP101)と、監視範囲Aに向かってレーザ光を照射して監視範囲Aの位置を特定する監視範囲位置特定工程(SP102)と、レーザレーダ1の俯角φ0を調整する俯角調整工程(SP103)と、監視範囲Aにおける垂直走査角度の最小値φminを算出する最小値算出工程(SP104)と、監視範囲Aにおける垂直走査角度の最大値φmaxを算出する最大値算出工程(SP105)と、垂直走査角度の最小値φmin及び最大値φmaxに基づいてレーザレーダ1の垂直画角Δφを設定する垂直画角設定工程(SP106)と、を有し、垂直画角Δφの範囲内でレーザ光を垂直方向に走査させて障害物Tを検出する。
(もっと読む)
3次元計測方法
【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
撮像装置及び眺望判定方法
【課題】 任意の被写体を含む空間の眺望の程度を判定することができる撮像装置を提供する。
【解決手段】 任意の被写体を含む空間を撮像する撮像部8と、前記任意の被写体を含む空間の基準画像を取得する基準画像取得部4と、前記撮像部により撮像された撮影画像と前記基準画像とを比較することにより前記撮影画像における前記任意の被写体の眺望の程度を判定する眺望判定部4とを備える。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
測距装置
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】単一の撮像部の画角よりも広い画角を有するとともに距離精度の高い距離画像を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】同一方向に向けて配置される複数のカメラユニット10A〜10Dと、これらの制御および取得される複数の距離画像に対する演算処理を行う演算制御ユニット15とを備える。各カメラユニット10は、対象物へ向けて光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報と前記反射光の強度を示す輝度情報とを画素毎に有する距離画像を取得する撮像部12とを有する。演算制御ユニット15は、第1距離区間探索部、最近接距離区間選択部、第2距離区間探索部、距離情報置換部、2次元位置補正部および距離画像合成部とを有しており、複数の距離画像を合成した際の距離データのばらつきなどを補正する。
(もっと読む)
撮像モジュール、撮像装置、画像処理装置及び画像処理方法。
【課題】 複数の光学ユニットを有する撮像モジュールにおいて鏡面反射による影響を抑制することを目的としている。
【解決手段】 複数の光学ユニットを有する撮像モジュールであって、複数の光学ユニットのうちの少なくとも一部の光学ユニットに対して偏光フィルタを備え、偏光フィルタを備える光学ユニットにより得られる画像データに基づいて、被写体までの距離情報を推定する。
(もっと読む)
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム
【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
距離画像カメラおよびこれを用いた距離測定方法
【課題】箱などの物体の表面反射率が低い場合であっても、その物体までの距離を極力正確に測定することが可能な距離画像カメラおよびこれを用いた距離測定方法を提供する。
【解決手段】認識対象物体へ光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された画素P毎に有する距離画像Gdと、前記反射光の受光強度を示す受光レベル情報を画素P毎に有する受光レベル画像Gaとをそれぞれ取得する撮像部12と、これらの制御および演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は、受光レベル画像Gaを2値化した2値化受光レベル画像Gbを得る2値化処理部と、2値化受光レベル画像Gbに含まれる1つ以上の同一物体をそれぞれ認識する領域化を行う領域化部と、認識された同一物体毎に対応する各画素Pの距離情報を平均化する距離平均化部とを有する。
(もっと読む)
21 - 40 / 408
[ Back to top ]