
Fターム[2F112FA35]の内容
Fターム[2F112FA35]の下位に属するFターム
ウインドウ発生 (100)
パターンマッチング (364)
形状特定のためのパラメータ抽出 (80)
Fターム[2F112FA35]に分類される特許
41 - 60 / 408
情報処理装置、情報処理方法、および位置情報のデータ構造
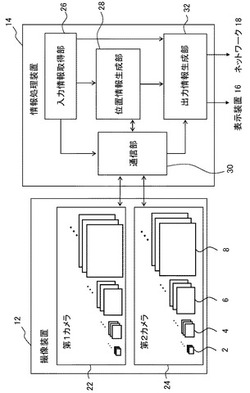
【課題】対象物の動画像から応答性よく位置情報を取得する。
【解決手段】撮像装置12は第1カメラ22、第2カメラ24を含む。各カメラはそれぞれ、既知の幅を隔てた左右の位置から同じタイミング、同じフレームレートで対象物を撮影する。そして撮影した各フレーム画像を所定の複数の解像度の画像データに変換する。情報処理装置14の入力情報取得部26は、ユーザからの指示入力を取得する。位置情報生成部28は、ステレオ画像のデータのうち低解像度、広範囲の画像で対象物の領域または動きのある領域を対象領域としておよそ見積もり、当該領域のみ高解像度の画像でステレオマッチングを行い、対象物の3次元の位置を特定する。出力情報生成部32は、対象物の位置に基づき必要な処理を行い出力情報を生成する。通信部30は、撮像装置12に対する画像データの要求および取得を行う。
(もっと読む)
視差算出装置、距離算出装置及び視差算出方法

【課題】二つの視点それぞれから得られた画像間の視差を算出する際、画像間の歪み又はずれの影響を抑え、精度の高い視差を簡易に算出する視差算出装置、距離算出装置及び視差算出方法を提供する。
【解決手段】視差算出装置100は、第一カメラ1から得られた基準画像及び第二カメラ2から参照画像を取得する。画像分割部101は、条件設定部102によって設定される分割条件に従い、基準画像及び参照画像それぞれを複数の領域に分割する。補正量決定部103は、分割された領域毎に画像ずれ量を算出し、その画像ずれ量に基づき補正量を決定する。視差算出部104は、補正量決定部103によって決定された補正量に基づいて画像分割部101から得られる分割基準画像及び分割参照画像の各領域に対して画像の補正を行い、補正後の画像に基づいて視差を求める。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
移動体検知システム
【課題】移動体に衝突されずに移動体を精度良く検知する移動体検知システムを提供する。
【解決手段】移動体検知システム1は、ステレオ動画像を撮像するステレオカメラ3と、ステレオ動画像が入力されるシステム本体4とを備える。システム本体4は、ステレオ動画像を処理する処理部6を有する。ステレオカメラ3及びシステム本体4は、移動体の移動に支障しないように移動経路外に設置される。ステレオカメラ3は、移動経路上に空間範囲として設定された検知範囲を撮像範囲に含むステレオ動画像を撮像する。処理部6は、ステレオ動画像における各フレームの画像並びにステレオカメラ3の光軸間隔及び焦点距離に基づいて、その移動体の空間位置を算出し、算出した移動体の空間位置が検知範囲内に入ったとき、その移動体を検知したと判定する。これにより、ステレオカメラ3及びシステム本体4は、移動体に衝突されずに移動体を精度良く検知する。
(もっと読む)
画像補正方法及び画像補正装置
【課題】レンズと画像センサから構成されるカメラの特性を用いて高精度の画像補正をできるようにする。
【解決手段】カメラの焦点距離、画像センサの並進量に加えて、画像センサの傾きをパラメータとして画像センサから得られた画像を補正する。レンズアレイと画像センサから構成されるレンズアレイステレオカメラの場合には、各レンズが同じ方向を向いていること、各レンズの歪み特性が同一であること等を拘束条件として、カメラキャリブレーションを行い画像を補正する。
(もっと読む)
画像処理装置および方法、ならびに移動体衝突防止装置
【課題】近距離範囲で物体を正確に認識できる画像処理装置および方法、ならびに移動体衝突防止装置を提供。
【解決手段】画像処理装置は、撮像部、および撮像部が撮像した画像を処理する画像処理部を備え、撮像部は、撮像レンズ、撮像レンズを駆動しフォーカシング距離を変更する合焦機構、および撮像素子を有する。合焦機構は、撮像レンズを駆動して撮像レンズの光軸方向における異なる位置の物体を撮像素子に鮮明に結像させるように順次フォーカシング距離を変更するフォーカススイープを行う。撮像部は、フォーカススイープにおいて複数の異なるフォーカシング距離に応じてそれぞれの画像を撮像する。画像処理部は、この撮像された複数枚の画像から、各画像において鮮明に結像された物体を認識し、それぞれの画像の撮像時のフォーカシング距離に対応してこの認識された物体の位置を表示する物体分布画像を生成する。
(もっと読む)
測距装置及び撮像装置
【課題】一対の測距用レンズが基線長方向に対して直交方向にずれが生じた場合に、誤差の大きい測距データを出力することがないようにすることができる測距装置及び撮像装置を提供する。
【解決手段】一方の基準ブロックS1内の基準像に対して他方の比較ブロックS2内の相関性の高い比較像を探索する際に、基線長に対して垂直方向に所定位置だけずらして基線長と同じ方向で探索を行い、この検索により算出された撮像データ内における基準像と比較像との間の相対位置差(マッチング値の最小値)が所定値より小さいか否かを判定し、この相対位置差が所定値より小さいと判定した場合には算出した相対位置差を測距演算に使用し、この相対位置差が所定値より大きいと判定した場合には算出した相対位置差を測距演算に使用しないようにする。
(もっと読む)
形状計測装置
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
物体検出装置及び物体検出方法
【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
測位装置、歩幅データ補正方法およびプログラム
【課題】 この発明は、移動量の計測にGPSを利用することなくユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供する。
【解決手段】 被写体の撮影を行う撮影手段と、加速度を検出する加速度センサと、方位を計測する方位センサと、歩幅データを記憶する歩幅データ記憶手段と、直線状の移動経路上の複数の地点(X1,X2)でそれぞれ行われた撮影の情報に基づき複数の地点(X1,X2)間の距離を算出する距離算出手段と、この距離とこの移動中に計数された歩数に基づいて歩幅データを補正する歩幅補正手段とを備えている。
(もっと読む)
ステレオカメラ
【課題】撮影画像から検出することが困難なカメラ光軸の傾きのずれを抑えることで、経時変化が距離測定精度に及ぼす影響を低減できるステレオカメラを提供する。
【解決手段】第1の単眼カメラ100と第2の単眼カメラ110とを一体に並設したステレオカメラであって、第1の単眼カメラ100および第2の単眼カメラ110は、光軸に直交する基準面100a,110aを有し、第1の単眼カメラ100および第2の単眼カメラ110の基準面100a,110aに当接させるとともに、この2つのカメラの光軸が同一直線上になる位置に並設させて連結するカメラステイ120と、カメラステイ120に取り付けられた第1の単眼カメラ100と第2の単眼カメラ110からの撮影画像を補正する画像補正手段(不図示)と、画像補正手段で補正された補正画像から視差を求め、被写体の距離を算出する距離算出手段と(不図示)、を備える。
(もっと読む)
電子カメラ、画像表示装置、プログラム及び記録媒体
【課題】 本発明は、装置が大型化せず、簡単な構成でサイズ情報を容易に取得し、そのサイズ情報を記録用画像に関連付ける手段を提供する。
【解決手段】 電子カメラは、撮像部と、認識部と、選択部と、第1算出部と、第2算出部と、記録処理部とを備える。撮像部は、撮影光学系を介して被写体の像を撮像する。認識部は、撮像部が生成する第1画像から主要被写体を認識する。選択部は、主要被写体に応じた複数の測定点を選択する。第1算出部は、選択部が選択した測定点ごとに、各々の測定点に対し距離を算出する。第2算出部は、第1算出部が算出した各々の距離に応じて主要被写体の大きさを示すサイズ情報を算出する。記録処理部は、撮像部が生成する記録用の第2画像とサイズ情報とを関連付けてメモリに記録する。
(もっと読む)
ステレオ画像処理装置及びステレオ画像処理方法
【課題】テクスチャの弱い領域を有する画像であっても、画像の対応付けに際しミスマッチングを軽減して高精度の視差検出を行うことができるステレオ画像処理装置、方法を提供する。
【解決手段】第一の画像と第二の画像が入力されると、第一の画像の第一の画素データを相互に異なる位置に含む複数の第一のウィンドウの各々について、当該第一ウィンドウと、指定された視差データに対応した前記第二の画像の第二のウィンドウとの間の非類似性に応じた評価値であるウィンドウコストを生成する。次に、第一のウィンドウのウィンドウコストに、第一の画素データに隣接する三以上の画素データのウィンドウコストを累積加算した累積加算コストを集計した修正コストを計算し、計算した修正コストに基づいて第一の画像の画素データそれぞれの対応点を第二の画像において求め、視差データを出力する。
(もっと読む)
光波距離測定装置
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】ディスパリティ画像を生成するためのステレオ画像を撮像するカメラの光軸のずれを補正する。
【解決手段】カメラ21−1,21−2は、異なる視点から、同一の被写体を撮像する。画像ずれ補正部22は、撮像された複数の画像を、ずれ調整部24の調整パラメータ保存部82に保存されている調整パラメータに基づいて変形し、それぞれ補正画像を生成する。マッチング部23は、ステレオマッチング処理によりディスパリティ画像を生成すると共に、複数の補正画像間の視差方向の対応付けが不能な程度を示すエラー量の全画面の積分値をマッチング評価値として算出する。ずれ調整部24は、調整パラメータのうち、視差方向の対応付けに必要とされるパラメータを変化させて、マッチング評価値が最小となるように調整パラメータを更新して、調整パラメータ保存部82に保存する。本発明は、ディスパリティ画像生成装置に適用することができる。
(もっと読む)
ステレオカメラ校正方法及び装置
【課題】複数の単眼カメラを備え、各単眼カメラから撮像された画像の視差から物体の距離を測定するステレオカメラにおいて、ステレオカメラから校正用ターゲットまでの距離を正確に測定できるようにして、ステレオカメラの校正精度を向上せしめる。
【解決手段】2つの単眼カメラ1,2と、該単眼カメラを連結するカメラステイ3でステレオカメラを構成する。該ステレオカメラの前方に校正用ターゲット30を、後方にレーザ距離計20を設置し、カメラステイの、算出距離方向と垂直に交わる面を基準面として、レーザ距離計により、基準面までの距離L1,及び校正用ターゲットまでの距離L2を測定する。そして、基準面が、算出する距離の原点と既知の位置関係にあることを利用して、測定した距離L1,L2から、ステレオカメラから校正用ターゲットまでの距離を正確に求めて、ステレオカメラのパラメータを校正する。
(もっと読む)
測距装置と方法とプログラム並びに撮像装置と方法とプログラム
【課題】 AF処理が不要な状態が検知されたときに、測距装置の動作に用いる複数の電源のうち、特定の電源供給を停止して電力消費を低減する測距装置および同装置を備える撮像装置に関する。
【解決手段】 被写体からの入射光を結像する第1測距レンズおよび第2測距レンズで結像される被写体像に応じた第1測距信号を出力する第1測距素子と第2測距素子を備え、第1測距信号と第2測距信号とに基づいて被写体までの距離を特定する主制御装置と通知可能で、第1測距信号と第2測距信号とを主制御装置のインターフェース用に変換する画像変換部と、画像変換部に供給される電力を制御する電源制御部と、を有し、電源制御部は通常モードから省電力モードに移行するときに、画像変換部への電力供給を停止する、測距装置による。
(もっと読む)
画像測定装置
【課題】高精度かつ高速なオートフォーカス処理を可能にする。
【解決手段】画像測定装置は、ワークを撮像するフレームレートが可変の撮像装置と、前記ワークに対して光を照射する照明装置と、前記撮像装置の合焦位置を制御して前記合焦位置を合焦軸方向の位置情報として出力する位置制御システムと、前記位置制御システムによる合焦位置の制御に際して前記撮像装置のフレームレートを制御すると共に、前記撮像装置のフレームレートに応じて前記照明装置の光量を調整する制御装置とを備える。
(もっと読む)
体積検出装置、及び、体積検出方法
【課題】対象物の位置や姿勢、挙動等によって隠蔽部が生じることがあっても、シート上の対象物の体積を正確に検出することのできる体積検出装置、及び、体積検出方法を提供する。
【解決手段】対象物の距離画像データを距離画像センサ4で取得する。取得した距離画像データをデータ記録手段25に記録する。可視部分から推定される対象物の体積を現在体積算出手段24によって算出する。現在と過去の距離画像データを比較し、対象物の中で距離画像センサ4の位置から隠れている部分の体積を隠蔽体積算出手段26によって検出する。現在体積算出手段24で算出した体積と、隠蔽体積算出手段26で算出した体積と、を基に対象物の体積を算出する。
(もっと読む)
画像処理装置およびプログラム
【課題】被写体および被写体外を含む視差マップを、処理量を抑えつつ得ることができる画像処理装置を提供すること。
【解決手段】少なくとも2つの視点の画像から視差マップを生成する画像処理装置であって、2つの視点の画像のうち、基準とする画像について、被写体の領域を検出する被写体領域検出部と、被写体の領域についてステレオマッチングを行い、該領域の視差マップを生成する被写体領域マッチング処理部と、被写体の領域外についてステレオマッチングを行い、該領域の視差マップを生成する被写体外領域マッチング処理部と、2つの視差マップを合成する合成処理部とを備える。
(もっと読む)
41 - 60 / 408
[ Back to top ]