
Fターム[2F112FA35]の内容
Fターム[2F112FA35]の下位に属するFターム
ウインドウ発生 (100)
パターンマッチング (364)
形状特定のためのパラメータ抽出 (80)
Fターム[2F112FA35]に分類される特許
61 - 80 / 408
距離測定装置
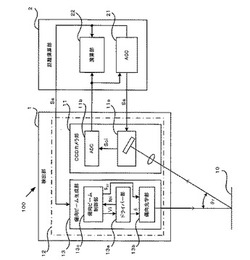
【課題】本発明は、複数ビームを使用した3角測量方式による距離測定装置において、複数ビームの山部のプロファイルの非対称性による測定精度のバラツキを軽減した距離測定装置を提供する。
【解決手段】レーザビームを偏向して、複数点を時分割で同じ時間、且つ、同じ間隔で測定物表面を照射する偏向ビーム生成部13とレーザビームの反射光を1つの走査信号として、レーザビームの偏向タイミングと同期して受光するCCDカメラ部11と、偏向ビーム生成部とCCDカメラ部とを固定する検出基盤部12とを備える検出部1と、CCDカメラ部の出力を一定に制御するAGC21と、当該出力のビームプロファイルの形状と位置の変化から、測定物10表面と検出部1との距離を求める演算部22とを備える。
(もっと読む)
画像処理装置およびその方法

【課題】撮像データから被写体の実距離を高精度に推定する。
【解決手段】距離推定部200は、符号化開口を有する絞りを備えた撮像光学系を用いて撮像された撮像データを入力し、撮像データを撮像した前記撮像光学系の撮像パラメータを取得する。スペクトル計算部701は、撮像データのスペクトルを算出する。スペクトルモデル生成部702は、撮像パラメータおよび被写体距離に対応する光学特性情報、並びに、スペクトルモデルを用いて、撮像データに対応するスペクトルモデルである予測モデルを生成する。評価関数生成部707は、撮像データのスペクトルおよび予測モデルを使用して評価関数を生成する。距離推定部200は、評価関数から撮像データが表す画像に含まれる被写体の実距離を推定する。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】異なる場所から検出した特徴点の見え方が各検出場所で変化する場合であっても、移動体の位置を推定することが可能な、移動体位置推定装置及び移動体位置推定方法を提供する。
【解決手段】撮像部2が撮像する周囲画像の撮像範囲内へ投光した線状光が屈曲している部分である折曲部において折曲部平面から予め設定した角度で立ち上がる立ち上がり線を算出する立ち上がり線算出部16と、撮像部2が撮像する周囲画像の撮像範囲の変化に応じて、立ち上がり線算出部16が算出した立ち上がり線と、撮像部2から特徴点までの距離に基づいて、撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部とを照合する特徴点照合部20と、特徴点照合部20が照合した撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部との位置の変位量に基づいて、車両Vの位置を推定する移動体位置推定部22を備える。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
測距装置および撮像装置
【課題】 2つの測距用撮像素子のそれぞれから出力される画像データの出力タイミングを補正することで、精度を向上させることができる測距装置および同装置を搭載した撮像装置に関する。
【解決手段】 被写体像に応じた画像信号を出力する第1撮像素子および第2撮像素子を第1の制御信号を用いて駆動したとき、第1撮像素子が出力を開始した時から第2撮像素子が出力を開始した時までの第1時間と、第2撮像素子が出力を開始した時から第1撮像素子が出力を開始した時までの第2時間と時間を計測し、この計測された時間が一定値以上か否かを判定することで、第1撮像素子と第2撮像素子の駆動タイミングの補正値を決定し、第1撮像素子と第2撮像素子の画像出力タイミングを合わせる測距装置による。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
空間光パターンに基づく深さデータの生成
空間光パターンに基づいて深さデータを生成するための技術について一般に説明される。いくつかの例では、深さデータを生成する方法が、空間光パターンが投射される1つまたは複数の物体の画像を取得することであって、画像内の空間光パターンのぼやけが深さ方向に単調に増加または減少する、取得することと、対象画素周りの局所画像領域にある画像の空間周波数成分値を算出することと、深さと空間周波数成分値との事前に設定した関係を用いて、算出した空間周波数成分値に対応する深さデータを求めることとを含む。 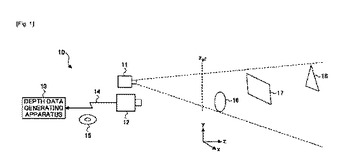 (もっと読む)
(もっと読む)
測位処理装置、測位処理方法、画像処理装置および画像処理方法
【課題】互いに異なる視点から撮影された複数の撮影画像に基づいて測位対象の位置を測定する場合に、カメラ内部パラメータを用いなくても、簡易にかつ高精度に測位対象の位置を測定する。
【解決手段】互いに異なる視点から撮影された複数の入力画像に基づいて、測位対象の3次元位置を測定する測位処理装置100であって、各入力画像に対応する光学系に入射する光線の進行方向を示す光線ベクトルを各入力画像内の各画素に対応付けた光線情報を保存している光線情報保存部102と、光線情報保存部102に保存されている光線情報を用いて、測位対象の3次元位置を測定する測位部110とを備える。
(もっと読む)
固体撮像装置
【課題】被写体までの距離の分解能が高い固体撮像装置を提供する。
【解決手段】本実施形態の固体撮像装置は、それぞれが複数の画素を含む複数の画素ブロックを有する撮像領域を備えた撮像素子と、被写体からの光を結像面に結像する結像レンズと、前記複数の画素ブロックに対応して設けられ、それぞれが開口部と遮蔽部とを有する複数のアパーチャ要素を含んでいる。各アパーチャ要素は前記結像レンズからの光をフィルタリングする、アパーチャと、前記複数のアパーチャ要素に対応して設けられた複数のマイクロレンズを有している。各マイクロレンズは、対応するアパーチャ要素によってフィルタリングされた光を前記撮像領域に結像するマイクロレンズアレイと、前記撮像領域に撮像された画像の信号を処理し、前記被写体までの距離を推定する信号処理回路と、を備えている。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備えている。フォトゲート電極PGは、光入射面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から裏面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
校正装置、距離計測システム、校正方法および校正プログラム
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
車載カメラを用いた測距装置
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
光センサー
【課題】光センサーの光学系において光源光の使用波長が変動しても、1/4波長板が確実に直線偏光を円偏光に変換して、良好なセンサー感度を確保維持する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び二次元イメージセンサー6,14を備える。波長板ユニットは、構造性複屈折を利用した1/4波長板7と、反射面を有する振動板8との一体構造からなる。二次元イメージセンサーは受光面6a,14aに同心で異なる半径の円形ビームスポット形状が振動板の反射面8aの位置に対応して入射し、その出力信号からビームスポット形状の面積又は半径を測定して振動板の位置又は変位量を検出する。
(もっと読む)
3次元形状取得装置および3次元形状取得プログラム
【課題】複数の画像から高い精度で奥行き情報を生成する3次元形状取得装置および3次元形状取得プログラムを提供する。
【解決手段】3次元形状取得装置は、基準画像および参照画像からブロック画像を、それぞれ基準ブロック画像および参照ブロック画像として切り出すブロック画像切出手段と、基準ブロック画像における所定の色を基準色として特定し、基準ブロック画像および参照ブロック画像において、基準色に所定の範囲内で類似する色の画素を対象領域として抽出する対象領域抽出手段と、基準ブロック画像における所定の色を対象領域の背景をマスクする置換色として特定し、基準ブロック画像および参照ブロック画像において、対象領域に含まれない画素の色を置換色で置き換える色置換手段と、位相限定相関法により視差を計測する視差計測手段と、視差計測手段が計測した視差から3次元座標位置を生成する3次元座標位置生成手段とを備えることを特徴とする。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】照明部と撮像部の校正時からの変化を異常として検知する。
【解決手段】対象物体の三次元形状モデルの情報を保持する保持部と、撮像部により撮像された対象物体の距離情報を取得する距離情報取得部と、撮像部により撮像された対象物体の濃淡画像を取得する濃淡画像取得部と、保持部に保持された三次元形状モデルの情報と、距離情報とに基づいて対象物体の位置および姿勢を推定する第1位置姿勢推定部と、保持部に保持された三次元形状モデルの情報を濃淡画像上に投影した投影情報と、濃淡画像の幾何特徴とに基づいて対象物体の位置および姿勢を推定する第2位置姿勢推定部と、第1位置姿勢推定部により推定された第1推定値と第2位置姿勢推定部により推定された第2推定値との差分値が閾値より大きいか判定する判定部と、判定部により差分値が閾値より大きいと判定された場合に、撮像部による撮像条件の校正が必要な状態であることを報知する報知部と、を備える。
(もっと読む)
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
61 - 80 / 408
[ Back to top ]