
Fターム[2F129AA01]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 地上航行体 (14,245)
Fターム[2F129AA01]の下位に属するFターム
Fターム[2F129AA01]に分類される特許
41 - 55 / 55
位置推定装置、位置推定方法及びプログラム記録媒体
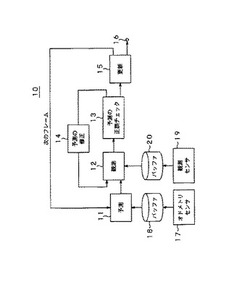
【課題】 推定値が逸脱したか否かを検査し、誤った推定値の場合は回復を試みることのできる位置推定装置を提供する。
【解決手段】 予測部11はオドメトリセンサ17が搭載された移動体の位置を予測する。観測部12は環境内の特徴点を追跡する。予測正誤チェック部13は、予測部11における位置の予測の正誤を判断する。予測修正部14は、予測を修正する。更新部15は、正しい予測に基づいて移動体の位置及び/又は姿勢を更新する。
(もっと読む)
地図更新データ作成方法及び装置並びにナビゲーション装置

【目的】地図更新する場合であっても短時間で音楽CDやDVDビデオなどの鑑賞を可能にする「地図更新データ作成方法及び装置並びにナビゲーション装置」を提供することである。
【構成】)地図データを保存する大容量記憶部に設定サイズの地図更新データコピー領域を設け、記録媒体に記録された地図更新データのうち新地図ファイルを用いて作成された地図更新データに基づいて大容量記憶部に記憶されている地図ファイルを書き換え、しかる後、該新地図ファイルを用いて作成された地図更新データを除いた地図更新データを記録媒体から大容量記憶部の地図更新データコピー領域に読み込み、ついで、該地図更新データと大容量記憶部の地図ファイルとを用いて新地図ファイルを生成して該大容量記憶部に記憶されている地図ファイルを書き換える。
(もっと読む)
経路生成装置及び経路生成方法
【課題】障害物の特性に応じて始点から終点までの経路を生成することが可能な経路生成装置及び経路生成方法を提供する。
【解決手段】まず、始点より終点への到達性を保証できる手段により経路を生成し、次に、障害物の特性に応じた境界条件を用いて経路を変形する。
【効果】始点より終点への到達性を確保しつつ、障害物の特性に応じた経路を生成できる。
(もっと読む)
無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラム
【課題】屋内外を移動する移動体の測位をGPS測位と無線LAN測位とを併用して行うにあたって、リアルタイム処理を可能とし、屋内外で連続して測位できる無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラムを提案する。
【解決手段】ある時点の融合結果の計算には、それ以前の無線LAN測位の結果、GPS測位の結果、及びGPS測位に付随して得られるDOPのみを使用することによりリアルタイム処理を可能にした。また、「無線LAN測位の結果とGPS測位の結果の重み付き平均」に替えて、理論的根拠が明確な重みを用いた重み付き平均を採用した。
(もっと読む)
位置情報通信システム、該位置情報通信システムに用いられる位置情報通信方法、送信装置、及び受信装置
【課題】
送信端末から送信された現在位置情報に基づいて同送信端末の現在位置を地図上に表示する受信端末を、比較的簡単な構成で実現する。
【解決手段】送信端末1により、同送信端末1の少なくとも緯度及び経度を含む現在位置が検出されて端末位置情報pが生成されると共に端末位置情報pに対応する現在位置が属するエリアの地図情報mが地図情報記憶部17から取得され、同端末位置情報p及び地図情報mが受信端末2へ送信される。受信端末2により、端末位置情報p及び地図情報mが受信され、地図情報mに基づいて地図が作成されると共に端末位置情報pに基づいて同地図上に送信端末1の現在位置が指定され、作成された地図及び同地図上に指定された送信端末1の現在位置が表示される。このため、受信端末2側で地図情報を記憶する記憶部を設ける必要がなく、比較的簡単な構成で送信端末1の現在位置が地図上に表示される。
(もっと読む)
端末装置
【課題】 離れた場所に対応付けられたコンテンツであっても、適切なタイミングで表示することができる端末装置を提供すること。
【解決手段】 本発明は、有効となる時刻と地理的位置が関連つけられたコンテンツに対し、現在位置からコンテンツに記載された位置までの移動所要時間を計算し、コンテンツが有効となる時刻よりも移動所要時間分前もって利用者に表示するようにした。これにより、利用者は表示されたコンテンツを参照してから移動所要時間かけてコンテンツに記載された位置に移動し、コンテンツに記載された時刻に行われるイベントを体験することができる。
(もっと読む)
走行支援装置および方法
【課題】 ドライブメモの登録地点を適切な位置に設定し、再度その位置を通るときに当該ドライブメモを有効に活用する。
【解決手段】 メモ作成指示がなされた際、車両の現在位置を読み込み、発話地点よりも手前の走行経路上の所定地点をドライブメモ登録地点として算出する。算出されたドライブメモ登録地点に対応付けて、発話内容をドライブメモとして記録する。車両がドライブメモ登録地点、もしくは手前の地点に到達したとき、該当するドライブメモを読み出して音声出力する。
(もっと読む)
ルートシミュレーション装置、ルートシミュレーション方法及びルートシミュレーションプログラム
【課題】 災害発生時における任意の地点間の道路の安全性を適切に評価することができるルートシミュレーション装置、ルートシミュレーション方法及びルートシミュレーションプログラムを提供する。
【解決手段】 操作者が操作部28から所望の出発地、目的地を入力すると、始終点取得部12が出発地を移動の始点、目的地を移動の終点として認識し、移動ルート抽出部14が、上記始点、終点間を移動できる道路を、地図情報の中から抽出する。安全性評価部16は、上記抽出された道路の安全性を、記憶部26に記憶された道路の安全性に関するデータに基づいて評価する。比較部20は、全性評価部16の評価結果に基づき、移動ルート抽出部14が抽出した道路の安全性を比較し、結果を表示部30に表示する。
(もっと読む)
加速度センサの補正装置および加速度センサの出力値補正方法
姿勢角演算器(14)は、加速度センサ(10)の出力値からロボットの姿勢角を演算する。姿勢角比較器(16)は、レジスタ(20)に設定された特定姿勢における姿勢角と検出された姿勢角とを比較し、その差を補正値演算器(18)に出力する。補正値演算器(18)は差を解消するように零点補正器(26)あるいは感度補正器(28)に補正値を出力する。レジスタ(20)に設定される姿勢角は、入力器(22)から設定してもよい。  (もっと読む)
(もっと読む)
経路検索方法及び装置
【課題】 出発地点と到着地点、及びその間の経路が判明した場合に、動的な情報データベースから経路周辺の情報を自動的に抽出し、付加し、提示する。
【解決手段】 本発明は、出発地点と到着地点に関する情報を入力し、出発地点と到着地点及び、周辺開催イベント情報を有するイベントデータベースから取得したイベント情報から、当該イベント開催地点を経由した場合の経路を検索し、検索された経路が与えられたある条件を満たすかを判定し、条件を満たす検索経路とイベント情報を出力する。
(もっと読む)
絞り込み検索用インデクス構造及び情報検索装置
【課題】
キーワードの先頭から検索する文字を入力するごとに候補文字を絞り込む絞り込み検索を高速に実行できるようにする手段とインデクス構造を提案することを目的とする。
【解決手段】
人名や住所などのキーワード文字列を格納するデータに対して、そのキーワードの文字単位に、該当するデータ件数と、その文字に続く次候補文字情報を持つようにインデクスを構成する。このインデクスを使用して、1文字入力される毎に、それまで入力された文字を先頭から持つデータのデータ件数と、次に検索候補となる文字を次候補文字情報として格納する文字の種類に応じた長さのビットマップを返却することにより抽出し、最終的に絞り込まれた目的とするキーワードデータを抽出する。
(もっと読む)
位置標定可用性を増加させるための手続
位置決定を行うために使用される方法論を所望の測位精度を達成することに関連して動的に変化させることを可能にする装置、方法およびシステムが提供される。 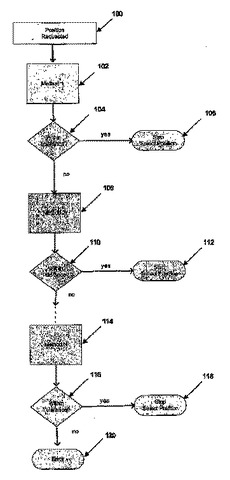 (もっと読む)
(もっと読む)
2つのアンテナまたはその同等物を使用してナビゲーションビーコン信号を検出するための方法
2つのアンテナまたは合成開口アンテナのいずれかを使用して複数の異なる測定値を受信すること、および干渉除去ビームを形成するために複数のアンテナ重み成分を使用して複数の異なる測定値を結合することにより、複数のナビゲーションビーコン信号を検出するための方法。一実施形態では、複数のアンテナ重み成分が固有値処理によって決定される。他の実施形態では、複数のアンテナ重み成分が簡略化された処理によって決定される。他の態様では、単一アンテナが最初に受信される測定値を受信するために使用される。最初に受信された測定値のコピーが作成され、空間ダイバーシティをエミュレートするために適切な時間遅延を実現するために処理される。最初に受信された測定値および処理されたコピーが干渉除去ビームを形成するために結合される。 (もっと読む)
ナビゲーション装置
【課題】ユーザの旅行目的に応じて複数の施設ジャンルを設定し、それに該当する施設を検索できるナビゲーション装置を提供する。
【解決手段】複数の施設ジャンルを設定し(ステップS1)、施設間の距離範囲を設定して(ステップS3)、その複数の施設ジャンルにそれぞれ該当する施設群を施設ジャンルごとに複数検索する(ステップS5)。そして、検索された各施設群の中から少なくとも一つ以上の施設をそれぞれ抽出し(ステップS6)、抽出された各施設間の距離が設定された距離範囲内であると判定された施設の組み合わせにより、候補エリアを設定する(ステップS8)。
(もっと読む)
測定及び記憶された重力傾度を用いて慣性航法測定値の精度を改善する方法及びシステム
【課題】 重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムを提供する。
【解決手段】 一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。その方法の一実施形態は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
(もっと読む)
41 - 55 / 55
[ Back to top ]