
Fターム[2F129BB15]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 標識・目印 (372)
Fターム[2F129BB15]の下位に属するFターム
灯台 (1)
Fターム[2F129BB15]に分類される特許
161 - 180 / 371
車両位置提示方法、及びカーナビゲーション装置
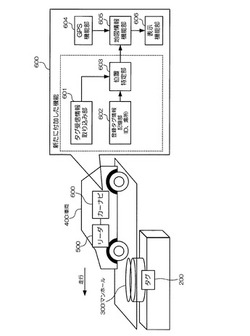
【課題】衛星が見渡せない場所であっても車両の現在位置を特定し、かつ、車両の現在位置の特定精度を向上させる。
【解決手段】タグ200は、各所に設けられたマンホール300内に設置されている。走行する車両400のリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取る。位置特定部603は、読み取ったタグ受信情報(ID)と登録タグ情報記憶部602の登録タグ情報(のID)とを照合し、対応するタグ200の設置場所(経度、緯度)を特定する。地図情報機能部605は、位置特定部603から供給されるタグの設置場所(緯度、経度)を補正情報として、GPS機能部604から供給される現在位置(経度、緯度)とともに地図情報上にプロットし、表示機能部606により表示する。
(もっと読む)
ナビゲーション装置

【課題】現在走行中の車両位置が所定エリア内であることを正確に判断し、自車両位置の判定精度を向上させることができるナビゲーション装置を提供する。
【解決手段】車両に搭載されたカメラ6が路面を撮像し、画像処理手段7が撮像画像から路面上の特徴物を抽出し、分類手段9が抽出された特徴物は車両の側方に向けて延びている特定の特徴物であるか否かを分類し、記憶手段10が特徴物の分類結果と特徴物が撮像されたときに、位置情報検出手段20により検出された位置情報とを対応付けて記憶し、判断手段11が特定の特徴物に対応付けられた位置情報に基づき特定の特徴物が車両の前後方向に所定の間隔毎に複数存在するか否かを判定し、所定の間隔毎に複数存在すると判定したときは、車両は所定エリアを走行していると判断する。
(もっと読む)
マーカ素子の設置方法及び識別方法
【課題】
マーカ素子の判別精度を格段に向上させ、マーカ素子の利用環境を拡大することが可能なマーカ素子の設置方法及び識別方法を提供すること。
【解決手段】
M系列状に配列されるマーカ素子を地面に設置するマーカ素子の設置方法において、該マーカ素子は、1つのブロック体のみ又は複数のブロック体を組み合わせることにより、サイズが異なる複数種類の四角形の表面を有するマーカ素子が少なくとも形成され、同一のサイズの該マーカ素子(a)を直線状に連続して配置する基準列と、該基準列の少なくとも一方の側に、該基準列に使用したマーカ素子と異なるサイズのマーカ素子(b)〜(d)をM系列状に配列するデータ列とを有することを特徴とする。
(もっと読む)
視覚無しでの方向誘導システム
【課題】人の頭部が向く方向との差異を抑制した方向を検知し、その方向を基に誘導する方向を人が視覚以外の感覚で認識できる態様で伝えて、人を誘導する視覚無しでの方向誘導システムを提供する。
【解決手段】視覚無しでの方向誘導システム10は、(1)フレーム21、ジャイロセンサ11、第1、第2の加速度センサ12、13、並びに複数の方向指示手段14〜20を有する方向検知指示装置22と、(2)第1、第2の加速度センサ12、13で測定した出力データからベクトル変換手段26で算出したベクトルデータを基に、ジャイロセンサ11の出力を方向変化データとして採用するか否かの判定をし、方向変化データを算出する方向変化データ採用判定算出手段27と、方向変化データにより更新される方向データを記録する方向データ記録手段30と、方向指示手段14〜20のいずれか1を作動させる方向指令手段31とを有する制御装置24とからなる。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】出発地または経由地から、目的地までの誘導経路を引かずに経由地の案内を行う場合であっても経由地通過判定でき、また、現在位置が経由地に接近しつつある状況ではなく、現在位置が経由地近傍を通過して遠ざかりつつある状況のときに経由地通過判定を行いことができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、端末装置から送信される、当該端末装置にて入力される経由地情報と、端末装置にて取得される端末装置の現在位置情報と、に基づき、記憶された地図データに基づく地図上において、端末装置にて取得された2つの現在位置情報に基づく閉曲線の内部領域に、経由地情報に基づく経由地が存在する場合、経由地を通過したと判定する。
(もっと読む)
ナビゲーションシステム装置
【課題】従来のものに比べ、目的位置を精度良く特定するとともに指示できるナビゲーションシステム装置を提供する。
【解決手段】ナビゲーションシステム装置1は、案内の目標又は目的となる対象物の位置を示す対象物位置情報17Aと、形状を示す対象物形状情報17Bとを記憶する記憶部17と、外部から取得した位置情報及び進行方向から現在位置及び進行方向を判定する現在位置判定部15と、撮像して得られた複数の映像から対象物となりうる物体像を抽出し、物体像の相対位置を測定する映像物体位置測定部18と、現在位置判定部15が判定した現在位置及び進行方向と位置情報とから対象物の相対位置を算出し、物体像と対象物の相対位置とが一致するとともに、対象物形状情報17Bと物体像の形状とが一致するとき物体像が対象物であると判定する対象物判定部14と、対象物を映像において強調表示するハイライト表示・ナビ情報生成部13とを有する。
(もっと読む)
位置情報を送信する位置情報送信システム及び位置情報送信装置
【課題】ユーザの携帯端末が予め周囲の端末との近距離通信の許可を行うことなく、当該装置の運営側がインセンティブを持って携帯端末を所持するユーザに現在位置を知らせることができるシステム及び装置を提供すること。
【解決手段】位置情報送信システム20は、所定の場所に設置される自動販売機が備える位置情報送信装置10及び携帯端末装置50を含み、携帯端末装置50は、GPS信号が受信できないことを判定した場合にGPS信号と同一のインターフェースで位置情報を要求する信号を発し、位置情報送信装置10は、位置情報を位置情報記憶部31に記憶し、携帯端末装置50をかざして行う非接触通信を含む、ユーザからの購入申込を受け付け、購入申込を受け付けたことに応じて、位置情報を要求する信号を受信した場合に、記憶した位置情報をGPS信号と同一のインターフェースをエミュレートして非接触通信により携帯端末装置50に送信する。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】車両が進入できない道路が分岐点に接続されている場合であっても、自然でユーザに違和感を与えることのない案内を行うことができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、道路網データに基づく、誘導経路上の分岐点の進入路と脱出路とのなす角度が所定の角度より小さいか否かの判定と、分岐点に対して誘導経路以外に接続する接続道路が存在するか否かの判定と、接続道路が進入路から進入可能な道路であるか否かの判定と、に基づき、分岐点の前後において誘導経路が道なりであるか否かについての判定結果を生成し、分岐点に対応する判定結果が道なりでないとの結果である場合、分岐点における進行方向に対応する案内データを、出力部を介して出力することにより、案内を実行する。
(もっと読む)
車両支援装置及びその方法
【課題】
車両の位置評定に光ビーコン装置を利用することにより、車両の前進方向に対する角度を算出し、車両の位置評定の精度を向上させる車両支援装置を提供する。
【解決手段】
車両支援装置は、路側装置の発光手段1からの複数の拡散光線を受光手段2が受光し、光情報検出手段3が当該受光した光量を検出し、光情報記憶手段4がこの光量を記憶し、変化量演算手段5がこの光量の変化量を演算し、移動方向予測手段7が移動速度計測手段6により計測された移動速度及びこの変化量に基づいて車両の移動方向を予測し、表示手段8がこの予測結果を表示するものであり、発光装置1からの拡散光線の変化量により車両の移動角度を算出して移動方向を予測することで車両の位置評定の安定化及び高精度化を図ることができる。
(もっと読む)
車両位置測定装置及び車両位置測定プログラム
【課題】車両の位置を高精度に特定することができるようにする。
【解決手段】レーザーレンジファインダ3により距離が測定された地物のカメラ画像上での位置を特定し、その地物のカメラ画像上での位置から上記地物の形状及び色を検出する形状色検出部19と、形状色検出部19により検出された地物の形状及び色が基準地物の形状及び色と一致する場合、位置情報記録部11から上記基準地物の正確な位置情報を取得する位置情報取得部20とを設け、車両位置算出部21が位置情報取得部20により取得された基準地物の正確な位置情報とレーザーレンジファインダ3により測定された地物までの距離から車両1の位置を算出する。
(もっと読む)
自車位置認識装置及び自車位置認識方法
【課題】低コストで高精度な地物情報を収集することが可能な地物情報収集装置及び地物情報収集方法を提供する。
【解決手段】自車両の現在位置を表す自車位置情報Pを取得する自車位置情報取得手段16と、自車両の周辺の画像情報Gを取得する画像情報取得手段12と、画像情報Gに含まれる認識対象の画像認識処理を行う画像認識手段18と、自車位置情報Pに基づいて、画像認識手段18による認識対象の認識結果を表す認識情報を、当該認識対象の認識位置の情報Aaと関連付けて記憶する認識結果記憶手段DB3と、同じ場所の画像情報が複数回画像認識されることにより認識結果記憶手段DB3に記憶された、同じ場所に関する複数の認識情報に基づいて、繰り返し画像認識することが可能な認識対象を学習地物として抽出し、学習地物の位置情報Aaと共に出力する学習地物抽出手段31と、を備える。
(もっと読む)
車両ドライバーを補助するための方法およびデバイス
【課題】車両のドライバーを補助するための方法およびデバイスを提供すること。
【解決手段】車両(100)の外部の車両環境を表現するビデオ信号を生成することと、ビデオ信号から少なくとも1つの特徴を抽出することと、抽出された特徴を少なくとも1つの基準特徴と比較することであって、基準特徴は、複数の予め計算された基準特徴から選択され、複数の予め計算された基準特徴は、マップデータベース(220)内に位置属性として格納されている、ことと、抽出された特徴と基準特徴との比較に基づいて、車両環境内のオブジェクトを識別することと、識別されたオブジェクトに基づいて、車両(100)のドライバーに指示を提供することと、を含む、ドライバー補助方法。
(もっと読む)
電子式案内システムとそのプログラム
【課題】GPSと、無線タグから位置情報を取得する携帯端末の省電力化を図ること
【解決手段】定期的に位置情報を送信する無線タグ2と、前記無線タグ2から位置情報を受信する無線タグ受信手段31と、GPS衛星1からのGPS信号を受信するGPS受信手段32と、前記GPS信号から位置情報を算出する第2の制御手段33と、位置情報を記憶する記憶手段35と、表示報知手段34とを具備した携帯端末とから構成され、前記無線タグ2から出入り口以外の情報を受信した直後に出入り口の情報を受信した時点で、前記GPS受信手段32の動作を開始、あるいは、前記無線タグ2から出入り口の情報を受信した後に出入り口以外の情報を受信した時点で、前記GPS受信手段34の動作を停止する電子式案内システム。
(もっと読む)
位置識別子間の関係を管理するための方法及びシステム
【課題】位置と関連付けられた位置識別子間の関係を管理するための方法及びシステムを提供すること。
【解決手段】位置と関連付けられた位置識別子間の関係を管理するための方法及びシステムを提供する。位置識別子間の関係を管理するための方法及びシステムが開示される。関係は発信識別子及び目標識別子を含む。固有の関係は、発信識別子及び目標識別子と関連付けられた位置コード及び位置関係により定められる。同義語サービス、翻訳サービス、及び検証サービスは、関係を関係記憶装置に格納する前に新しい又は修正された関係を分析する。グラフサービス、統計サービス、及び報告サービスは、関係記憶装置に格納された関係を分析する。
(もっと読む)
自車位置測定装置
【課題】本発明は、自車位置測定装置に係り、自車位置の精度をある程度高精度に維持しつつ地物認識の処理負担を軽減することにある。
【解決手段】自車両が今後走行する領域において出現すると推定される地物候補のうちから特徴量の多い地物を抽出すると共に、その抽出される地物によって、自車位置補正のために認識すべき地物が十分に満たされるか否かを判別する。その結果、自車位置補正のために認識すべき地物が十分に満たされないと判別される場合には、上記の如く抽出される地物の数が増えるように抽出範囲を拡大する。一方、自車位置補正のために認識すべき地物が十分に満たされると判別される場合には、上記の如く抽出される地物を認識すべき地物として設定する。そして、その設定された地物を認識し、その認識結果に基づいて自車位置をGPS及び走行軌跡に基づくものから補正する。
(もっと読む)
目的地予測システム、目的地予測方法及びプログラム
【課題】良い位置精度を常に得ることが難しい携帯電話等の端末でも目的地を予測できる目的地予測システム、目的地予測方法及びプログラムを提供すること。
【解決手段】本発明は、端末の予測位置とその測定誤差とを検出する位置情報検出手段と、予測位置と測定誤差と地図データベースとに基づいて、端末がどのエリアに属するかを確率的に計算するエリア存在確率検出手段と、日時と、エリアと、日時に端末がエリアに存在する存在確率との履歴情報に基づいて、端末の時系列の移動パタンを検出するエリア存在手段付学習手段と有する。
(もっと読む)
目的地予測システム、目的地予測方法及びプログラム
【課題】良い位置精度を常に得ることが難しい携帯電話等の端末でも目的地を予測できる目的地予測システム、目的地予測方法及びプログラムを提供すること。
【解決手段】本発明は、端末の予測位置とその測定誤差とを検出する位置情報検出手段と、前記予測位置と測定誤差との複数の時系列の測定結果に基づいて、複数の測定結果の間を補間する位置情報補間手段と、前記複数の測定結果が補間された軌跡に属するエリアを通過した確率を計算するエリア存在確率分布検出手段とを有する目的地予測システムである。
(もっと読む)
情報表示装置、情報表示方法及び情報表示用プログラム
【課題】使用者において、自己の現在位置の確認等の処理を正確に行わせることが可能な情報表示装置等を提供する。
【解決手段】交差点等に関係する複数の道路夫々の風景を示す画像で構成され、当該交差点等に対応付けられた画像グループと、一の交差点等に対応付けられた一の画像グループと当該一の交差点等に関係する複数の道路上の夫々を当該一の交差点等から移動したときに到達する他の交差点等の夫々に対応付けられた他の画像グループの夫々と、を関連付けるポインタと、を記憶しておく。
自身の現在位置を探索するための初期画像を検索する場合、GPSの検出誤差に相当する誤差円ECと交差する道路D14乃至D19に対応する画像を当該初期画像PLG1乃至PLG6とする。
(もっと読む)
情報表示装置、情報表示方法、情報表示用プログラム及びデータ構造
【課題】使用者において、自己の現在位置の確認等の処理を正確に行わせることが可能な情報表示装置等を提供する。
【解決手段】交差点等についての複数の道路D夫々の風景を示す画像で構成され、当該交差点等に対応付けられた画像グループGGと、一の交差点等に対応付けられた一の画像グループGGと、当該一の交差点等に関係する複数の道路上の夫々を当該一の交差点等から移動したときに到達する他の交差点等の夫々に対応付けられた他の画像グループGGの夫々と、を関連付けるポインタ12と、を記憶しておく。
自身の現在位置を探索する場合、過去に記憶している交差点等に対応する画像グループGGを先ず検索し、その後はポインタ12により示される他の交差点等に対応する画像グループGGを呼出ながら、自身の現在位置までの過去の軌跡を辿る。
(もっと読む)
目的地を判定するためのベクトルを有する地図データベース、及びベクトル判定方法
方法、データベース、メモリ、コンピュータが読取可能な媒体、及びナビゲーション装置が開示される。少なくとも1つの実施形態において、本方法は、複数の投影点を作成するために、複数の既知の住所地点を、地図データベースの住所セグメント・ベクトルに投影するステップ(S1)と、対応する複数の補間点を作成するために、当該複数の住所地点の住所について位置を補間するステップ(S2)と、投影点と対応する補間点との距離が閾値距離を上回る場合に、当該住所セグメント・ベクトルを、複数の住所サブセグメント・ベクトルに分割するステップ(S3)とを含む。実施形態は、住所セグメント・ベクトルが分割された場合に、本方法における複数の住所サブセグメント・ベクトルを、対応する住所セグメント・ベクトルの代わりに、及び対応する住所セグメント・ベクトルとともに、のうちの少なくとも1つにより格納したデジタル地図アプリケーション・データベースを含むメモリ(230)と、当該メモリ(230)を含むナビゲーション装置(200)と、複数の住所セグメント・ベクトル及び複数の住所サブセグメント・ベクトルを含むデジタル地図アプリケーション・データベースと、当該デジタル地図アプリケーション・データベースを含むコンピュータ可読媒体と、を含む。 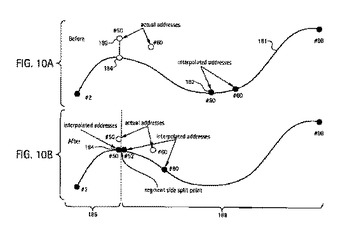 (もっと読む)
(もっと読む)
161 - 180 / 371
[ Back to top ]