
Fターム[2F129BB22]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830)
Fターム[2F129BB22]の下位に属するFターム
Fターム[2F129BB22]に分類される特許
2,141 - 2,160 / 5,061
センター装置、情報配信システム、情報配信方法
【課題】ユーザやサービス事業者の都合に合わせて静的情報の更新を行うことができるセンター装置、情報配信システム、情報配信方法を提供する。
【解決手段】駐車場の静的情報を配信するセンター装置であって、日本地図を経線と緯線により所定の大きさに区画した地域区画ごとに駐車場情報を記憶する記憶手段と、前記駐車場情報を前記地域区画単位で前記車載器に送信する制御手段と、を有し、前記制御手段は、前記車載器から、前記駐車場情報に含まれる静的情報の更新要求があった場合は、当該更新要求に含まれる検索位置情報に基づいて前記静的情報を更新する地域区画を設定し、前記設定された地域区画に含まれるすべての駐車場の静的情報を更新する一括更新用の静的情報か、又は前記設定された地域区画に含まれる駐車場の静的情報と、前記車載器に記憶されている静的情報との差分を更新する差分更新用の静的情報を送信することを特徴とする。
(もっと読む)
位置判定システム及び方法

【課題】 車両の車載装置が自律的に有する自車位置の異常を路側で判定できるようにする。
【解決手段】 本発明は、光無線通信と電波無線通信の双方に対応する車両5の車載装置2が自律的に有する自車位置の異常を、路側で判定するための位置判定システムに関する。このシステムでは、ビーコンヘッド8に対して車載装置2が送信したアップリンク光UOに基づいてビーコンヘッド8の通信領域Aに対する車両5の通過位置X0を路側で特定し、特定された車両5の通過位置X0を利用して、ビーコンヘッド8との光無線通信の後に車載装置2が送信する電波信号S5に含まれる車両5の自車位置X1が異常か否かを、路側で判定する。
(もっと読む)
行動予測装置、行動予測方法およびナビゲーション装置
【課題】精度の高い行動予測装置を提供する。
【解決手段】被参照者の行動に基づいて予測対象者の行動を予測する行動予測方法であって、予測対象者と被参照者の行動とその日時を蓄積した行動履歴データを参照して、予測対象者と被参照者が同一場所、同一時刻に滞在した行動を同行行動として抽出し、抽出された同行行動に関して、該同行行動以前に行われた予測対象者と被参照者との行動を事前行動としてそれぞれ抽出し、予測対象者のある時点での行動を検出し、検出された予測対象者の行動が、抽出された事前行動であるか否かを判定し、事前行動であると判定された場合に、被参照者の、対応する事前行動が検出されたか否かを判定し、判定された被参照者の事前行動の有無に基づいて、予測対象者の行動を予測する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施規定の選択を取得し、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための減速制御を行う。
(もっと読む)
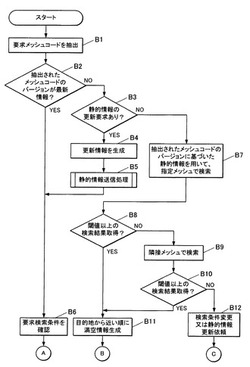
施設検索装置、プログラム、ナビゲーション装置、及び施設検索方法
【課題】より操作が容易で自由度の高い施設の検索技術を提供する。
【解決手段】地図情報に関する地図データベースと、各種ジャンルの施設に関するその位置情報を含む施設データベースと、前記地図情報に基づいて所定範囲の地図を表示する表示手段と、表示された地図上の位置の入力を行うためのタッチパネルと、音声による入力を行うための音声入力手段とを備えた施設検索装置において、任意のタイミングで所定の時間内に行われた発話及びタッチパネルのタッチのみにより音声入力及び位置入力があったことに応答して、該音声入力の内容が意味するジャンルに属し、該入力位置により特定される範囲に存在する施設を施設データベースから検索する検索手段(ステップ21〜31)を設ける。
(もっと読む)
ナビゲーション装置
【課題】従来のナビゲーション装置は、経路の高低差に関する情報を、標高のみに着目した表示画面によって提供するので、経路が描画された地図表示画面からは、経路の高低差に関する情報を読み取ることができない。
【解決手段】地図表示画面への推奨経路の描画を、経路の標高ごとに異なる描画色で行う。さらに、勾配の大きさ、勾配の長さおよび路面状態などの情報に基づいて、滑りやすい区間を強調表示する。これにより、経路選択や運転を行う際に、これらの情報を活用することが可能となる。
(もっと読む)
路上通信システム及び路上通信装置
【課題】 車載装置に正確な信号情報を提供することができる路上通信システムを提供する。
【解決手段】 交通信号制御機1aは、現時点で表示している信号灯色(以下、作成時信号灯色という)と当該作成時信号灯色が開始してからの経過時間、各信号灯色の点灯時間に基づいて、作成時信号灯色及び将来に表示する予定の各信号灯色並びにこれらの継続時間に関する信号情報を作成する。そして、交差点Iに流入する各道路に設置された各路上装置2について、当該路上装置2に対して信号情報を送信してから当該路上装置2が車載装置3に対して当該信号情報を送信するまでに要する時間ΔT(以下、通信所要時間ΔTという)を算出する。さらに、信号情報を通信所要時間ΔTに基づいて補正し、路上装置2に送信する。路上装置2は、この信号情報を車載装置3に送信する。
(もっと読む)
車両用情報呈示装置
【課題】前景と呈示情報との対応付けを容易にして、呈示情報の認知負荷を低減することを課題とする。
【解決手段】 自車両前方の事象に関する情報を自車両の乗員に呈示する車両用情報呈示装置において、自車両が走行している前景のイメージ画像に重畳して、前景の道路における左右の側線帯に対応した側線シンボルと自車両の進行方向を案内する案内シンボルとからなる道路シンボルを、自車両のフロントウィンドウの下端近傍で、かつ運転者が前景における進行方向の地平線付近を視ているときに認知可能な位置に呈示する情報呈示部100を有し、この情報呈示部100は、道路シンボルにおける左右の側線シンボルのなす角度θ31は、自車両が走行している前景の道路を運転者が視たときのイメージ画像(網膜像)における道路の左右の側線帯のなす角度θ32よりも小さくなるように側線シンボルを呈示して構成される。
(もっと読む)
センター装置、情報配信システム、情報配信方法
【課題】ユーザやサービス事業者の都合に合わせて静的情報の更新を行うことができるセンター装置、情報配信システム、情報配信方法を提供する。
【解決手段】駐車場情報を配信するセンター装置であって、日本地図を経線と緯線により所定の大きさに区画した地域区画ごとに駐車場情報を記憶する記憶手段と、前記車載器からの動的情報の取得要求に応じて、当該取得要求に含まれる検索位置周辺の駐車場の動的情報を前記車載器に送信する制御手段と、を有し、前記制御手段は、前記車載器から動的情報の取得要求を受信した際、前記取得要求に含まれる検索位置が属する第1の地域区画を決定し、前記検索位置から所定の距離内を駐車場検索対象エリアに設定し、前記第1の地域区画内の前記駐車場検索対象エリアに存在する駐車場の動的情報を取得し、車載器に送信することを特徴とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方の道路区間において運転支援制御を実施するか否かを、ユーザが選択することができなかった。
【解決手段】自車両の周辺の道路の特徴を示す特徴情報を取得し、運転支援制御を実施する候補とする道路の特徴を示す候補特徴情報を取得し、前記候補特徴情報に示される特徴と合致する特徴が前記特徴情報に含まれる場合、前記運転支援制御の実施可否を、ユーザに選択させるための案内を行い、前記ユーザの選択を示す情報を取得し、前記ユーザが前記運転支援制御の実施を許可すると選択した場合、前記運転支援制御を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施可否を示す情報を取得し、前記運転支援制御の実施可否を示す情報が示す変速比制御の実施可否に応じて、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させるための制御を行い、前記運転支援制御の実施可否を示す情報が示す制動部による減速制御の実施可否に応じて、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための制御を行う。
(もっと読む)
軌道表示のための方法及び装置
本発明の実施形態は、グラフィック情報を表示するための表示装置(14、240)と、前記グラフィック情報を表示するために、前記表示装置(14、240)を制御するためのプロセッサ(11、210)と、軌道の方向に関する情報と色との関係を表すカラーマッピング情報(20)のためのストア(12、230)と、前記判断された情報と前記カラーマッピング情報(20)に基づいて、軌道の方向に関する情報と色とを判断するための軌道-色モジュール(490)とを有し、前記プロセッサ(11、210)は前記軌道-色モジュール(490)に応答して、グラフィック構成要素の少なくとも一部を前記判断された色で表示するように、表示部(14、240)を制御することを特徴とする装置を提供する。  (もっと読む)
(もっと読む)
ハイブリッド車両の運転支援装置、運転支援方法及びプログラム
【課題】運転者に不要な運転操作等に対する注意を促すことにより、不必要な燃料消費量の増加を抑制することが可能となるハイブリッド車両の運転支援装置、運転支援方法及びプログラムを提供する。
【解決手段】CPU51は、誘導経路上のモータ走行区間において、エンジン始動があった場合には、当該エンジン4が始動した位置を表す始動位置情報を運転履歴DB46に記憶する。そして、CPU51は、液晶ディスプレイ15に表示した誘導経路上のモータ走行区間において、運転操作履歴DB46にエンジン4が始動した位置を表す始動位置情報が記憶されている場合には、このエンジン4が始動した位置を始動位置マークによって誘導経路上に表示する。
(もっと読む)
車載機器、車載システム、および、緊急時通知方法
【課題】緊急時において、利用者の家族等に適切な情報を通知することのできる車載機器等を提供する。
【解決手段】DTVチューナ10は、緊急警報放送を受信すると、検出信号をナビゲーション装置20に送信する。ナビゲーション装置20は、この検出信号を受けて、自車の位置情報、自車の速度、自車の傾き、及び、キーロック状態を含む車両情報を取得する。そして、この車両情報を含むメールデータを生成し、緊急時の通知先として登録されているメールアドレスを指定する。通信端末30は、車両情報を含む電子メールを家族等の携帯電話に送信する。
(もっと読む)
水中移動体の位置検知装置
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
車載表示制御装置、車載制御システム
【課題】表示モニタの輝度を適切に調節する。
【解決手段】ナビゲーション装置1は、ヘッドランプスイッチ2から出力されるイルミネーション信号を検出する。または、ヘッドランプ制御装置4から出力されるCAN通信データを受信する。そして、検出したイルミネーション信号、または受信した通信データに基づいて、表示モニタの輝度を制御する。
(もっと読む)
地図表示装置
【課題】ユーザにとって見やすい方角を上向きに表示するのに、ユーザに手間を取らせない装置の提供。
【解決手段】現在地からの距離が最も近い重心を持つグループデータを特定する(S450)。その特定したグループデータの重心から現在地までの距離が、所定の閾値以下であると判断すると(S460でYes)、その特定したグループデータに含まれる各基準地点情報が示す位置と現在地との重心を、表示中心点として算出する(S470)。そのグループデータに関連付けられた基準方角を上方角とした場合の、その特定したグループデータに含まれる各基準地点情報が示す位置と現在地とが表示可能、かつ、最大の縮尺値を算出する(S480)。算出した表示中心点、上方角および縮尺に基づいて地図画面を表示部14に表示する(S485)。その特定したグループデータに含まれる基準地点の名称とアイコンとを地図に重ねて表示部14に表示する(S490)。
(もっと読む)
データ通信システムおよびこれに用いる第1車載装置、第2車載装置、およびデータ記憶装置
【課題】 一の車両が走行した場所への経路案内を、他の車両にて行なうことを可能とする技術を提供する。
【解決手段】 データ通信システム1は、車両に搭載されて用いられる第1車載装置10と、第1車載装置10を搭載した車両とは異なる車両に搭載されて用いられる第2車載装置20と、携帯電話機端末30と、からなる。
第1車載装置10は、車両が走行した経路を示す経路情報を、車両の搭乗者のニックネームと関連付けて記憶する。
携帯電話機端末30は、パスワードを第1車載装置10に送信して、所定のニックネームに関連付けられている経路情報を受信する。
第2車載装置20は、携帯電話機端末30から経路情報を受信し、その経路情報に基づいて経路案内を行なう。
(もっと読む)
車両のUターン検出装置およびUターン検出方法
【目的】確実にUターンを検出することができる「車両のUターン検出装置およびUターン検出方法」を提供することである。
【構成】車両のUターンを検出する際、車両右折時における道路上の所定特徴物MKを車載のカメラで捕捉して記憶し、車両が右旋回を完了したか監視し、右旋回完了時に、特徴物MKをカメラが捕捉しているか調べ、捕捉している場合には、Uターンしたものと判定し、捕捉していない場合にはUターンでないと判定する。
(もっと読む)
精度予測装置、精度予測方法及び精度予測プログラム
【課題】後処理型の移動体自己位置計測装置において、経験のない運用者によっても計測を行えるようにすることを目的とする。また、位置の計測精度を均一化することを目的とする。
【解決手段】精度情報記憶部18は、位置を計測するための情報を観測する観測装置の過去の観測状態と、その観測状態を取得した時の位置の計測精度とを記憶する。誤差予測演算部17は、精度情報記憶部18が記憶した過去の観測状態とその観測状態を取得した時の位置の計測精度とに基づき、観測装置の現在の観測状態での位置の計測精度を予測する。運用者は、誤差予測演算部17が予測した計測精度に基づき、衛星からの電波を受信させるか否か等の判断を行う。
(もっと読む)
2,141 - 2,160 / 5,061
[ Back to top ]