
Fターム[2F129BB29]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Z軸(上下方向) (278)
Fターム[2F129BB29]に分類される特許
261 - 278 / 278
ナビゲーション装置
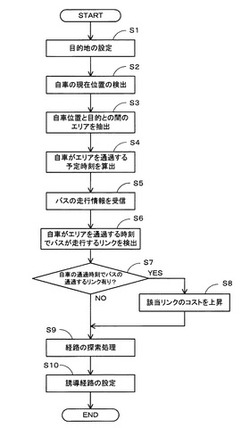
【課題】 バスの走行状況を検出し、検出されたバスの走行状況に基づいて探索コストを調整して経路探索を行うことによって、バスの走行状況を考慮した目的地までの経路の設定が可能となり、利用者の利便性を向上させたナビゲーション装置を提供する。
【解決手段】 目的地を設定した際において(S1)、バス運行管理センタ2から通信装置17を介してバスの走行状態を特定する為のバス走行情報を受信するとともに(S5)、自車の現在位置から目的地までに位置する各エリアの自車の予定通過時刻を算出し(S4)、いずれかのエリアで自社の通過予定時刻にバスが走行するリンクがある場合(S7:YES)には、該当するリンクのリンクコストを上昇させる(S8)ように構成する。
(もっと読む)
車両用運転支援装置

【課題】 走行に係り報知された事象に対する注意を何時まで払い続ければ良いのかを確実に把握できるようすること。
【解決手段】 送受信機10は、車両運転者に対して報知すべき事象(渋滞、混雑、速度規制、事故発生地点など)が存在する特定エリアまたは特定ポイントの位置を示す情報を含む道路交通情報を事象データとして取得する。制御回路2は、位置検出器3からの現在位置情報及び送受信機10からの事象データに基づいて車両の現在位置と前記特定エリアまたは特定ポイントとの位置関係を把握し、車両の進行方向に事象データにより示される特定エリアまたは特定ポイントが存在する場合に、その存在及び当該事象の種類を音声出力装置7により車両運転者に向けて報知すると共に、車両が当該特定エリアまたは特定ポイントを通過したときに、所定の通過メッセージを音声出力装置7により車両運転者に向けて報知する。
(もっと読む)
携帯機器及びその描画処理制御方法
【課題】 機器の持ち姿勢の状態変化に応じた低消費電力化、また違和感のない最適な地図画像表示をすることによってナビゲーションを可能とすること。
【解決手段】 方位角検出部13により機器の方位を検知し、この方位に基づいて、表示部に地図画像を表示する携帯機器である。機器の表示部の表示面の傾きの程度を検出する加速度検出部11と、その検出結果によって機器の保持・運搬・利用状態を判定する推定算出部16を備えている。この推定算出部16は、検出された機器の傾きが所定時間以上、所定の角度を外れるとき、利用歩行者が地図画像を視認していない使用状態と判定し、地図画像に対して、表示演算処理の休止を行なって低消費電力化を行なうとともに、その判定直前の地図画像データを保持用メモリに書き出し、その後の視認使用状態の再開時の再表示に備えるようにする。
(もっと読む)
方位及び傾斜角検出装置、方位及び傾斜角検出方法、プログラム及び携帯端末装置
【課題】地磁気成分や重力成分を検出して方位及び傾斜角の情報を検出するにあたって、重力成分に含まれる誤差の影響を抑える。
【解決手段】測定データ取り込み手段702は加速度センサや磁気センサから測定データg,hを取り込む。第1の演算手段703は測定データg,hから方位角α0や仰角β0、地磁気伏角θ0を算出する。平均化手段704は地磁気伏角θ0を蓄積し平均値をとって地磁気伏角θとする。第2の演算手段705は測定データhと地磁気伏角θとから方位角αや仰角βを算出する。複数の解が存在する場合、それぞれの解を候補値(α1,β1)(α2,β2)とする。選択手段706は上記の値α0,β0を参考値とし、候補値(α1,β1)(α2,β2)から検出値(α,β)を選択する。
(もっと読む)
加速度センサの補正装置および加速度センサの出力値補正方法
姿勢角演算器(14)は、加速度センサ(10)の出力値からロボットの姿勢角を演算する。姿勢角比較器(16)は、レジスタ(20)に設定された特定姿勢における姿勢角と検出された姿勢角とを比較し、その差を補正値演算器(18)に出力する。補正値演算器(18)は差を解消するように零点補正器(26)あるいは感度補正器(28)に補正値を出力する。レジスタ(20)に設定される姿勢角は、入力器(22)から設定してもよい。  (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】装置筐体に取り付けられた3軸加速度センサを用いて、距離センサによる走行距離の検出精度を高める。
【解決手段】ナビゲーション演算装置3は、車両への取り付け後最初に電源が投入され且つ車両が静止していることを条件に、車両に取り付けられたナビゲーション装置筐体の傾きを3軸加速度センサ4の前後、左右、鉛直方向の検出軸の出力として検出してその出力値を取付姿勢の基準値として記憶する。車両の走行中、3軸加速度センサ4の出力値の平均値と現在設定されている基準値とを加重平均することにより、基準値を車両水平状態での値に補正する。3軸加速度センサ4の出力値と補正した基準値とに基づいて車両の傾きを求め、その車両の傾きにより距離センサ6の出力による走行距離を補正する。
(もっと読む)
携帯装置
【課題】 歩行者が情報を表示する画面を目視しながら進行している場合であっても、進行方向に存在する物体を確実に検知することができる携帯装置を提供することを目的とする。
【解決手段】 利用者が進行中に情報を表示する画面を目視することが可能な携帯装置において、進行方向に基づいて所定の範囲内に存在する物体を検出する物体検出部17と、加速度を検出する加速度検出部16と、物体検出部17の物体の存在を検出する方向を変更する方向変更手段とを備え、加速度検出部16で検出した加速度に基づいて進行方向を算出し、方向変更手段は、算出した進行方向に、物体検出部17の物体の存在を検出する方向を変更する。
(もっと読む)
地図表示装置
【課題】 複数の階層を持つ施設内道路を表示する際に、道路が重畳して表示されるのを防ぐ。
【解決手段】 移動体の現在位置を検出する位置検出部と、道路地図ならびに施設内の階層情報を記憶する地図情報記憶部と、施設内の階層間の移動を検出する階層判定部と、現在位置の階層から先に移動する階層を予測する階層移動予測部と、現在位置の階層と前記階層移動予測部で予測した階層に関して地図情報を表示する表示制御部を備え、現在位置の階層と進行すると予測される階層の地図を同時に表示する。
(もっと読む)
位置情報管理方法、および、装置
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地図データをダウンロードして使う。
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
携帯装置で使用するためのパーソナルナビゲーション装置
ユーザによって使用されるナビゲーションシステムは、ナビゲーションユニットと携帯装置とを含む。ナビゲーションユニットは、ナビゲーション関連出力を生成する。ナビゲーションユニットは、無線通信リンクを介して携帯装置にナビゲーション関連出力を送信する。携帯装置は、ナビゲーション関連出力を受信し、それによって実施される処理のためにナビゲーション関連出力の少なくとも一部を使用する。一実施形態では、携帯装置は、携帯装置のユーザからユーザ入力を受信するための入力インターフェースを含む。このような一実施形態では、携帯装置は、無線通信リンクを介してナビゲーションユニットにナビゲーション関連入力を送信し、ナビゲーションユニットは、ナビゲーション関連出力を生成するため、ナビゲーション関連入力の少なくとも一部を使用する。 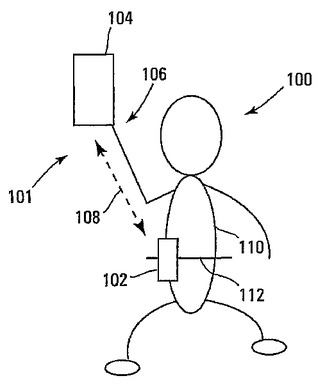 (もっと読む)
(もっと読む)
地図表示装置及び地図表示方法
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地データをダウンロードして使う。
(もっと読む)
地理的軌道の軌跡を割り出すための方法
所定の出発位置と所定の終点位置とを有する地理的軌道の軌跡を割り出すための方法は、装置の移動の間に物理的測定データをサンプルとして収集する車載同期センサ一式を備えているデータ収集装置を、前記出発位置から前記終点位置まで移動させるステップと、収集した測定データにもとづき、方位プロファイル、ピッチ・プロファイル、距離プロファイルおよびロール・プロファイルを割り出すステップと、前記方位プロファイル、前記ピッチ・プロファイル、前記距離プロファイルおよび前記ロール・プロファイルにもとづいて前記軌跡を割り出すステップとを有している。出発位置から終点位置までの装置の移動の間、前記物理的測定データのすべてが記憶される。記憶された測定データの取り出し後でかつ前記プロファイルの割り出しの前に、この方法は、前記一式のうちの第1および第2のセンサの測定データにそれぞれもとづいて、第1および第2の軌道パラメータをそれぞれ割り出し、第1の軌道パラメータを第2のパラメータにマッピングするステップと、該マッピングにもとづいて、第1および第2のセンサの測定データの誤差補償を決定するステップと、誤差補償によって第1および第2のセンサの測定データを補正するステップをさらに有している。 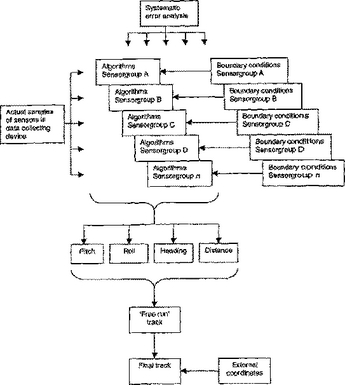 (もっと読む)
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
二重積分によって計算された測定に関連した絶対位置測定を使用することにより固体の移動を検出するための方法
本発明は、二重積分によって計算された測定に関連した絶対位置測定を使用して、固体の移動を検出するための方法に関するものであって、例えば、人体の移動の検出を意図している。本発明による方法においては、固体(2)の加速度を測定し、この測定の二重積分を行い、これにより、固体の第1並進移動に関する順次的な値を獲得し、さらに、特に回転といったような固体の少なくとも1つの第2自由度に関するの絶対位置測定を行う。本発明においては、回転測定を、並進移動測定へと変換し、並進移動測定を使用して第1並進移動を修正する。  (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
車両の情報出力システム及び情報出力方法
本発明は、車両の車両状態及び/又は環境状態を検出するための収集手段と、少なくとも2つの出力ポートを使用して情報を出力するための出力手段と、検出されたデータを処理して評価するための及びデータ評価に基づき情報を出力するための手段を制御するための評価及び制御装置とを備える車両の情報出力システムに関する。2つ以上の出力ポートの少なくとも1つを選択することができる。本発明はまた、関連の情報出力方法に関する。本発明によれば、評価及び制御装置は、検出されたデータを評価して、前記第1の情報を出力するために選択された出力ポートを介して、第1の情報の出力と第2の情報の出力との間に衝突が生じるかどうかを確かめ、衝突が検出された場合、第1又は第2の情報を出力するために出力ポートを変更する。あるいは、前記装置は、同一の出力ポートを介して第1又は第2の情報を出力するために要する時間を確認して、より短い時間を要する情報の出力に対して、より長い時間を要する情報の出力を遅らせる。必要時間が同一である場合、より高い優先性を有する情報が最初に出力される。 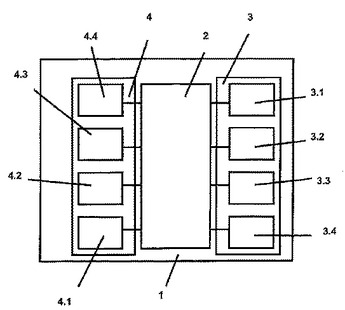 (もっと読む)
(もっと読む)
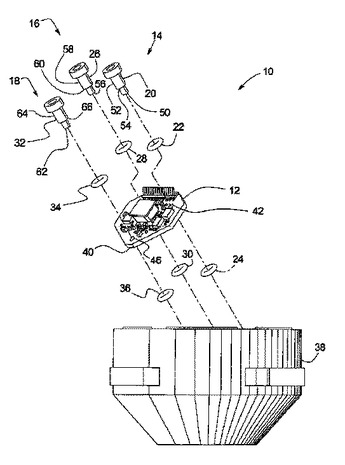
慣性センサアセンブリの弾性振動および衝撃絶縁
慣性センサシステムは、ベース、慣性センサ、および絶縁装置装着具を有する。絶縁装置装着具は、慣性センサをベースに固定し、絶縁装置装着具は、ボルトと、第1および第2振動吸収部材とを含む。ボルトは、慣性センサおよびベースを通して挿入され、第1振動吸収部材が、ボルトと慣性センサとの間にあり、第2振動吸収部材が、慣性センサとベースとの間にある。絶縁装置装着具が、ベースを通してホストシステムから伝播する振動、衝撃および/または音響雑音から慣性センサを絶縁する。
 (もっと読む)
(もっと読む)
261 - 278 / 278
[ Back to top ]