
Fターム[2F129BB29]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Z軸(上下方向) (278)
Fターム[2F129BB29]に分類される特許
101 - 120 / 278
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム
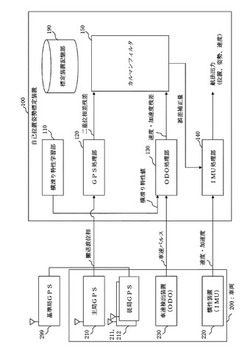
【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
(もっと読む)
歩行計測装置、歩行計測方法およびプログラム

【課題】 歩行体の左右の歩行動作に非対称性があっても、正確な移動方向の計測が可能な歩行計測装置、歩行計測方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて移動方向に関する物理量を検出する検出手段(ステップS1)と、この検出手段の検出により得られる前記物理量を表わす検出データのうち、左足を踏み出す歩行動作の際に得られる検出データと、右足を踏み出す歩行動作の際に得られる検出データとの何れか又は両方を、左右の歩行動作の大きさの違いに基づく前記検出データの差異を均衡させる方向に補正する補正手段(S9〜S11)と、この補正手段により補正された前記検出データに基づいて前記歩行体の移動方向を算出する移動方向算出手段(S12,S13)とを備えている。
(もっと読む)
速度算出装置及び速度算出方法並びにナビゲーション装置及びナビゲーション機能付携帯電話機
【課題】車両の速度を高精度に算出できるようにする。
【解決手段】PND1の制御部12は、自律速度算出部22により、加速度αz及びピッチレートωyの相互相関ρα,ωを用いて当該加速度αz及びピッチレートωyの相関が最も高くなるような時間差ΔTを算出し、設置距離Dを当該時間差ΔTで除算することにより時間差速度VTを算出する。この結果PND1は、GPS信号を受信することができない場合であっても、車両9の速度として当該時間差速度VTを用いることができる。さらにPND1は、時間差速度VTを基に車両9の現在位置を高精度に算出することができ、適切な範囲の地図画面を表示部2に表示できると共に正しい経路案内を行うことができる。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】 移動体の移動速度が様々に変化する場合でも、常に適切な間隔で位置データを記録していくことのできる測位装置、位置データの記録方法およびプログラムを提供する。
【解決手段】 移動体に保持されて現在位置の測定が可能な測位手段と、この測位手段による現在位置の測定を所定間隔で行わせる測位制御手段(S1〜S11)と、前記測位手段の測定によって順次取得される一連の位置データのうち一部の位置データの記録を省いて一部の位置データの記録を行う記録制御手段(S12〜S16)とを備え、移動体の移動速度が大きいときには位置データの記録を省く割合が大きくなり、前記移動体の移動速度が小さいときには位置データの記録を省く割合が小さくなるように、前記一連の位置データの記録制御を行う。
(もっと読む)
停車判定装置
【課題】取り付ける車両によらず適切な停車判定を行うことが可能となる停車判定装置を提供する。
【解決手段】フラッシュメモリ28に閾値が設定されていなければ、ROM16bから初期値の閾値を読み出し、ジャイロセンサ12および加速度センサ13の各軸について検出された動き量が読み出された閾値以下の状態が所定時間継続した場合、停車していると判定し、検出された動き量に基づき閾値を決定し、決定された閾値をフラッシュメモリ28に更新記憶させ、次回はフラッシュメモリ28から閾値を読み出して停車判定を行う。
(もっと読む)
移動体搭載用機器
【課題】移動体への取り付け状態によらず、移動体の移動により移動体の或る軸回りに角速度が発生した場合に、その軸とは異なる軸回りの角速度を精度良く得ることが可能となる移動体搭載用機器を提供する。
【解決手段】重力加速度算出部181が出力する重力加速度と、車体加速度算出部182が出力する車体加速度とに基づき、ジャイロセンサ132のピッチ軸と車体の鉛直軸とのなす角度を算出する取り付け角度算出部183と、ジャイロセンサ132が検出するヨー軸回りの角速度と、取り付け角度算出部183が算出した角度とに基づき、ジャイロセンサ132が検出するピッチ軸回りの角速度に含まれる不要成分を算出し、ジャイロセンサ132が検出するピッチ軸回りの角速度から、算出された不要成分を減算する補正部133と、を備える構成とした。
(もっと読む)
慣性測定ユニット(IMU)のための空間整合判断
本明細書で開示する主題は、慣性測定ユニット(IMU)の空間整合を判断するためのシステムおよび方法に関する。例として、第1のビークルベース方向を識別し、第1のビークルベース方向を地球ベース座標フレームに変換可能な第1の方向に関連付ける方法について説明する。第1の方向に少なくとも部分的に基づいてIMUの空間整合を判断する。 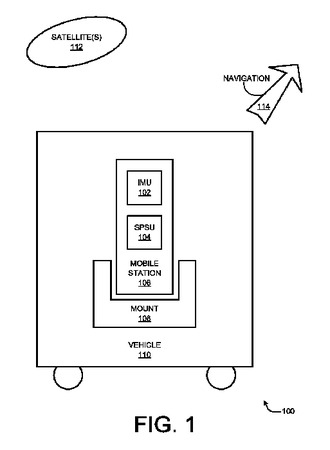 (もっと読む)
(もっと読む)
携帯電子機器
【課題】携帯電子機器において、ユーザの注意を喚起する。
【解決手段】携帯電子機器1は、自身の現在位置の情報である現在位置データを取得する位置取得部17,18と、安全な場所と安全でない場所とを判別可能な地図データ31を記憶する記憶部20と、地図データ31に基づいて、現在位置データが示す現在位置が安全な場所内であるか否かを判定する安全性判定部42〜44と、現在位置が安全な場所内でないと判定された場合に報知を行う報知部13とを有する。
(もっと読む)
多次元センサのオフセット、感度、および非直交性の較正
多次元センサ、磁気計、または加速度計が、センサによって提供される生データに基づいて較正される。生データが収集されると、これを使用して2次元センサまたは3次元センサのそれぞれ楕円パラメータまたは楕円体パラメータを生成することができる。例えば決定された楕円パラメータまたは楕円体パラメータなど、生データに基づいてオフセット較正係数が計算される。次いでこのオフセット較正計数および生データに基づいて、感度較正係数が計算される。次いでこの計算されたオフセットおよび感度較正係数に基づいて、非直交性較正係数を計算することができる。オフセット、感度、および非直交性較正係数を使用して生データを補正し、較正されたデータを生成することができる。  (もっと読む)
(もっと読む)
携帯機器
【課題】各種センサを備えた携帯機器の使用時の姿勢角度の変動を精度良く検出でき、正確にセンサからの出力を補正することが可能な携帯機器を提供する。
【解決手段】携帯機器の3軸方向への加速度を検出する加速度センサ131と、3軸方向の加速度成分に基づいて、前記携帯機器の回転軸を検出する回転軸検出部182と、検出された回転軸周りの携帯機器の回転角を算出する回転角算出部183と、算出された回転角の大きさに応じて、3軸方向の加速度成分の論理値を交換する軸交換手段133と、を備えるように構成する。
(もっと読む)
三次元画像表示プログラム、三次元画像表示機能を備えた携帯電話機等の携帯デバイス、及び三次元画像の表示方法
【課題】 携帯電話機等の携帯デバイスのディスプレイに、ディスプレイを仮想透視した三次元画像を表示する三次元画像表示プログラム等を提供する。
【解決手段】 地図情報サーバから携帯デバイスの周囲にある表示対象物のGPS情報を取得し、携帯デバイスのGPS情報を基準にした各々の対象物の相対座標を三次元データとして記憶する。この対象物の位置を示す三次元データを、三軸の加速度値と方位値から把握される携帯デバイスの姿勢に対応して変換するが、併せて、携帯デバイスのディスプレイに垂直な軸の加速度からディスプレイの地面に対する傾きを把握し、これに対応して対象物に対するユーザの視点を上方に移動させ、三次元データを変換することによって、ディスプレイを地面の方向に傾けた場合の視野を拡大する。携帯デバイスの姿勢をクォータニオンで表すことによって、姿勢の変化の判定や、画像を変化させる際の補間にかかる演算を効率化する。
(もっと読む)
移動体搭載用機器
【課題】低コストかつ簡単な演算で精度良く移動体の移動距離を算出するようにした移動体搭載用機器を提供する。
【解決手段】移動体の加速度を検出する加速度センサ131と、検出される加速度について動的加速度と静的加速度とを判別するための条件を記憶する閾値記憶部191と、判別条件に基づいて、加速度センサ131から出力された出力信号から動的加速度を判定する動的加速度判定部181と、判定された動的加速度に基づいて、移動体の移動距離を算出する移動距離算出部183と、を備えるように構成する。
(もっと読む)
速度算出装置、速度算出方法及びナビゲーション装置
【課題】本発明は、道路環境に関わらず、全ての道路環境下で移動体の速度を高精度に算出する。
【解決手段】本発明は、移動体に搭載されたPND50本体の取付使用角度に応じて、垂直方向の加速度αzに混入した進行方向の加速度αxの混入度合を相関係数Kとして求め、その相関係数Kに基づいて算出した垂直方向の加速度αzに混入している進行方向の加速度αxを当該垂直方向の加速度αzから減算することにより真の垂直方向の加速度αz´を求めた後、真の垂直方向の加速度αz´及び水平軸周りの角速度ωyに基づいて移動体の進行方向の速度Vを算出することができるので、PND50本体の取付使用角度が傾けられた状態でも、傾けられていないときと同様の正確な速度Vを算出することができる。
(もっと読む)
ナビゲーション装置、動作制御方法及び携帯端末装置
【課題】電力消費を低減する。
【解決手段】PND1は、当該PND1に作用する地磁気値Mを検出する地磁気センサ8を設けると共に、当該PND1がクレードル3に装着されているか否かをクレードル検出部17により判定する。PND1がクレードル3に装着されている場合、動作制御部29は、地磁気センサ8、方位算出部28及び姿勢角検出部27を動作させる。一方PND1がクレードル3に装着されていない場合、動作制御部29は、地磁気センサ8、方位算出部28及び姿勢角検出部27の動作を停止させる。これによりPND1は、車両9から取り外された場合は地磁気センサ8を動作させると共に、正しい方位を表す地磁気値Mを検出することが困難である車両9に取り付けられた場合は地磁気センサ8の動作を停止させることができる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーション機能付携帯電話機
【課題】本発明は、GPS信号を受信できない環境下においても移動体の現在位置を高精度に通知できるようにする。
【解決手段】本発明は、GPS信号に基づいて現在位置を測位し、現在位置を示す自車マークPMを周辺地図に重ねて表示し、現リンクに対する次リンクの属性情報を読み出し、当該次リンクに対して衛星信号の受信感度が悪いと想定されるエリアであると判断した場合、現リンクから次リンクへ移った後はGPS信号に基づく現在位置を用いるのではなく、自律的に推測した現在位置に従って自車マークPMを止めることなく周辺地図に表示し続けるようにする。
(もっと読む)
ナビゲーション装置、補正値初期化方法及びナビゲーション機能付携帯電話機
【課題】地磁気センサによる方位の検出精度を高め得るようにする。
【解決手段】PND1の制御部11は、サスペンド状態から電源オン状態に切り替えられた際、地磁気センサ8から得られた地磁気データTMDを補正するための補正値を含む学習値LN及びその変動幅を制限する学習レベルLLについて、方位算出部28により初期化処理を行う。これにより方位算出部28は、サスペンド状態への移行直前と比較して周囲の磁場が大きく異なる場合や、サスペンド中にPND1内の金属部品等における磁化が変化した場合にも、学習値LNおよび学習レベルLLを確実に最初の値に戻し、学習し直すことができる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】検出された歩数に歩幅データを掛け合わせることで自律航法機能における移動量の計測を行うとともに、任意の移動経路を移動しながらGPSによる測位を間欠的に行って、上記の歩幅データを補正することのできる測位装置、測位方法、およびプログラムを提供する。
【解決手段】自律航法機能の測位が行われる移動経路(T1)の後端地点でGPSによる測位を行い、この後端地点におけるGPSによる測位結果(B)と自律航法機能による測位結果(B1)との差異量を表わすベクトル(Vb)に基づき、自律航法機能により求められた移動経路(T1)の情報を補正し、さらに、自律航法機能により計測された移動経路(T1)の総移動量と、補正された移動経路(T2)の経路長との比較に基づいて、自律航法機能の演算処理で使用する歩幅データの補正を行う。
(もっと読む)
速度算出装置、速度算出方法及びナビゲーション装置
【課題】本発明は、道路環境に関わらず、全ての道路環境下で車両の速度を高精度に算出する。
【解決手段】本発明は、路面のうねりによって発生するZ軸方向の加速度αz、及び路面のうねりによって発生するY軸周りのピッチレートωyをそれぞれ3軸加速度センサ4及びY軸ジャイロセンサ5により検出し、当該加速度αz及びピッチレートωyを用いて速度Vを算出し、さらに速度に応じて速度Vを補正することにより、全ての道路環境下で速度Vを正確に算出することができる。
(もっと読む)
デッドレコニング装置
【課題】歩行者に装着されたセンサシステムによって人の歩行動作を計測、解析し、その移動方位と歩幅を装着型計算機システムが推定することにより、その歩行者に対して道案内などのアプリケーションを提供するために利用するデッドレコニング装置を提供する。
【解決手段】歩行動作に基づいて基準位置からの相対移動ベクトルを出力するデッドレコニング装置において、歩行動作を計測、解析して一歩ごとに歩行動作の移動方位と歩幅を推定して出力する手段と、前記出力された移動方位と前記出力された歩幅の信頼性を算定して出力する手段と、前記出力された移動方位と前記出力された歩幅に基づいて基準位置からの相対移動ベクトルを推定して出力する手段と、前記出力された移動方位と前記出力された歩幅、前記出力された移動方位の信頼性、前記出力された歩幅の信頼性に基づいて、前記出力された相対移動ベクトルの信頼性を算定して出力する手段を備える。
(もっと読む)
測位装置及びプログラム
【課題】 使用者が意識的に装置本体の姿勢を修正しなくとも、GPS衛星からの測位用電波を良好に受信できるようにする。
【解決手段】 測位手段と、を有する測位装置として用いられるコンピュータに、
測位装置本体が移動していることを検出すると、3軸加速度センサにより検出された3軸方向の加速度に基づいて重力方向の加速度を検知するとともに、当該重力方向とは逆方向を天面方向として検出する。そしてGPS衛星からの測位用電波を受信する複数のアンテナから、この検出された天面方向と最も近い方向を向いているアンテナを選択し、この選択されたアンテナにて受信された測位用電波に基づいて現在位置を測位する。
(もっと読む)
101 - 120 / 278
[ Back to top ]