
Fターム[2F129BB29]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Z軸(上下方向) (278)
Fターム[2F129BB29]に分類される特許
201 - 220 / 278
経路情報提供装置およびナビゲーション装置
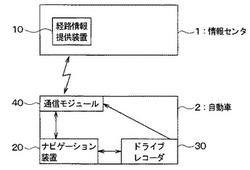
【課題】提供した予想旅行時間と実際の旅行時間との間に差異が生じた場合の原因を把握できるようにする。
【解決手段】ナビゲーション装置20により計測された道路区間の所要時間とその道路区間の予想旅行時間との差が予め定められた基準値よりも大きいことが判定された場合、周辺画像記憶装置30から経路情報提供装置10へ車両周辺の撮影画像および道路区間情報を送信するように指示される。そして、周辺画像記憶装置30から経路情報提供装置10へ車両周辺の撮影画像および道路区間情報が送信され、経路情報提供装置10の表示部に表示される(S304)。
(もっと読む)
位置検出携帯端末装置、方位決定方法および方位決定プログラム

【課題】装着者の体の向きとしての方位を簡易に決定すること。
【解決手段】磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、算出された地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定する。また、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を装着者の方位として採用して決定する。あるいは、最新方位にジャイロセンサによって取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
(もっと読む)
ポータブルナビゲーション装置
【課題】ユーザを煩わせることなくマップマッチングすべきか否かを確実に判断して好適な地図表示処理を行うポータブルナビゲーション装置を提供することにある。
【解決手段】判別手段(CPU11、判別プログラム16b2)により、加速度センサ13により検出された加速度に基づく加速度情報が、歩行時における所定の方向の加速度パターンに関する加速度情報であると判別された場合、マップマッチング制御手段(CPU11、マップマッチング制御プログラム16b3)により、マップマッチング手段(CPU11、マップマッチングプログラム16b4)によるマップマッチングを行わせないようにする。
(もっと読む)
車両用角速度センサの零点補正装置
【課題】車両に搭載される角速度センサの零点補正精度を向上させるとともに、車両が実際に使用されている状態での零点補正処理の頻度を上げる。
【解決手段】オフディレイ回路42は、イグニッションスイッチ50のオフ後にオン状態になっている所定時間にバッテリ40からイグニッションスイッチ50を迂回して3軸角速度センサ22、3軸加速度センサ24に電源+Bを供給する。この所定時間に車両停止状態検知センサ14(例えば、燃料計)の出力変化に基づいて車両が停止していると判断したとき、零点補正手段30が、3軸角速度センサ22の出力を更新後の零点補正値として記憶手段28に記憶し、更新後の零点補正値により3軸角速度センサ22の検出値を補正する。
(もっと読む)
飛しょう体及び飛しょう体に搭載される慣性装置の調定方法
【課題】 飛しょう体が備える慣性装置の調定を短時間で行うこと可能にする。
【解決手段】 飛しょう体の胴体外周に複数設けられた赤外線センサからの出力情報に基づき前記飛しょう体のロール角を求めるロール角推定手段と、前記飛しょう体の位置座標とピッチ角とヨー角とを算出するGPSジャイロとを有する姿勢角初期推定手段と、前記姿勢角初期推定手段から入力した前記ロール角に基づき、前記GPSジャイロがGPS衛星からのGPS信号を受信可能な姿勢に制御する操舵装置制御手段と、前記飛しょう体に搭載した慣性装置から入力した慣性情報と、前記姿勢角初期推定部から入力した前記飛しょう体の位置座標とロール角とピッチ角とヨー角とに基づき、前記慣性装置を調定して前記飛しょう体の位置と姿勢角を算出する航法装置とを備えるようにした。
(もっと読む)
走行情報データベース作成装置
【課題】走行道路と、当該走行道路における地点と、車両情報とを間違いなく関連付けて記憶することができるようにする。
【解決手段】制御回路2は、決定した走行道路が誤決定の可能性がないと判定したときには当該決定走行道路と自車両位置の地点と現在の車両情報とを関連付けて走行情報データベース用記憶部6に記憶し、また、狭角分岐路通過直後や広い交差点通過時点のような場合では、走行道路誤決定の可能性があると判断し、この時点での車両情報を仮記憶しておき、現時点から自車両が所定距離走行したときに決定した走行道路と、当該決定走行道路を前記所定距離戻った地点と、前記仮記憶しておいた車両情報とを関連付けて走行情報データベース用記憶部6に記憶する。
(もっと読む)
マルチセンサデータの収集/処理
ここに開示される主題は、デバイス内のマルチプルセンサの制御および利用に関するものである。例えば、デバイスの動きはデバイス内に配置された第1センサからの信号受信に応答して検出することができ、そのデバイス内に配置された第2センサのパワー状況は検出された動きに応答して変化させることができる。 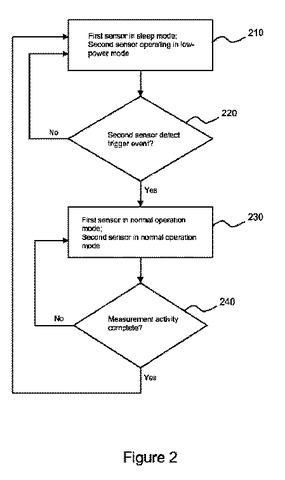 (もっと読む)
(もっと読む)
現在地測位装置及び方法
【課題】ナビセンサ14(GPSセンサ)による現在地測位不調期間では、Gセンサ15の出力に基づき現在地を測位するポータブルナビゲーション装置10において、現在地の精度を改善する。
【解決手段】ナビセンサ14の検出信号をカルマンフィルタにより処理して、該検出信号中の白色性ノイズを除去して、最適推定加速度を抽出する。最適推定加速度に基づき、移動量を算出する。ナビセンサ14による測位正常期間の所定の現在地を始点に設定し、該始点からの移動量に基づき現在地を測位する。
(もっと読む)
携帯型メディアコンテンツ再生システム、携帯型メディアコンテンツ再生装置およびメディアコンテンツ配信サーバ
【課題】メディアコンテンツのパートを組み合わせて再生することにより、交通機関で移動中に所望のメディアコンテンツを楽しみつつアナウンスも聞こえるようにしたメディアコンテンツ再生システムを提供する。
【解決手段】一コンテンツのメディアコンテンツを構成する複数に分割されたパートからなるメディアコンテンツを記憶する記憶手段C7と、交通機関を利用して所定の駅から次の駅まで移動した場合の駅間所要時間を示す駅間所要時間情報を取得する取得手段C5と、前記駅間所要時間情報に応じて、前記記憶手段に記憶されているメディアコンテンツのパートを編集する編集手段C12と、利用した交通機関の移動開始を検出する検出手段C10と、前記交通機関の移動開始を検出した場合に、前記編集手段C12で編集されたメディアコンテンツパートを再生する再生手段C13と、を備えた。
(もっと読む)
地図表示システム、携帯端末装置、地図スクロール方法
【課題】装置本体の傾きに応じて地図画像をスクロールする場合、傾斜スクロールモードに設定されたまま携帯端末装置が傾斜状態で放置された場合に、スクロールが連続して指示されないようにする。
【解決手段】携帯端末装置20は、傾斜スクロールモード設定手段210と、地図を表示する表示手段212と、傾斜を検出する傾斜検出手段204と、傾斜検出手段204の検出出力に基づいて傾斜の変位を検出する傾斜変位検出手段205と、傾斜変位検出手段205が検出した傾斜の変位に応じて表示手段212に表示された地図画像をスクロールさせるスクロール要求を出力するスクロール要求手段213と、を備え、傾斜スクロールモードが能動化され、傾斜変位検出手段205が携帯端末装置20本体の傾斜の変位を検出した場合に、スクロール要求手段213からのスクロール要求を制限するスクロール制限手段214を更に備えた。
(もっと読む)
道路形状算出装置及び車両センサ補正装置
【課題】車両の走行環境や走行状態に関わらず最適に道路形状を算出することが可能な道路形状算出装置を提供する。
【解決手段】道路の形状(θ)を算出する道路形状算出装置であって、車両の前後方向に働く実際の前後加速度と前記車両の前後方向に働く加速度を検出する前後加速度検出手段の検出値との間の第1関係式と、前記車両の横方向に働く実際の横加速度と前記車両の横方向に働く加速度を検出する横加速度検出手段の検出値との間の第2関係式と、前記車両の前後方向に働く実際の前後加速度及び前記車両の横方向に働く実際の横加速度と前記車両の前後方向に働く加速度を検出する前後加速度検出手段の検出値及び車両の横方向に働く加速度を検出する横加速度検出手段の検出値との間の第3関係式とから導かれる前記道路の形状(θ)に相当する加速度を算出するアルゴリズムに基づいて、前記道路の形状(θ)を算出する(S104)。
(もっと読む)
通信端末、測位システム及び測位方法
【課題】 GPSを用いることなく通信端末の現在位置を取得すること。
【解決手段】 携帯電話機10は、自端末の加速度を検出し、検出された加速度と検出時刻とを対応付けることで加速度データを生成する加速度データ生成部11と、生成された加速度データを複数保持する加速度データ保持部12と、保持された複数の加速度データを予め定められた経路上の各位置に対応する加速度の時系列変化パターンと照合することで得られた現在位置を取得する現在位置取得部15とを備えることを特徴とする。
(もっと読む)
ナビゲーション装置及びナビゲーション装置の制御方法
【課題】人間が携帯しながら携帯用ナビゲーション装置としても、また車内に持ち込んで車載用ナビゲーション装置としても、両方共に十分有効に利用することができる操作性が良好なナビゲーション装置及びナビゲーション装置の制御方法を提供する。
【解決手段】移動体の加速度を検出する第1検出手段14と、移動体の進行方向を検出する第2検出手段16と、移動体の三次元位置を検出する第3検出手段18と、第1、第2及び第3検出手段14,16,18の出力から移動体の位置を推定する位置算出手段20と、位置算出手段20で推定された移動体の位置と地図とを照合して移動体の現在位置を求める照合手段と、を有し、位置算出手段20は、モード選択手段を含み、モード選択手段は、移動体の移動方法から、移動体の適切な位置推定方法を選択する。
(もっと読む)
移動体位置測位装置
【課題】停車判定を適切に行い、停車状態に起因した移動体位置情報の変動を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星航法と慣性航法とを併用して移動体位置情報を導出する移動体位置情報導出手段と、加速度センサ及び/又は角速度センサの出力値に基づいて移動体が停止しているか否かを判定する第1移動体停止判定手段と、車速を表すことができる車載センサの出力値等に基づいて移動体が停止しているか否かを判定する第2移動体停止判定手段と、前記第1移動体停止判定手段により移動体が停止していると判定されたとき、そのときの前記移動体位置情報を記憶する記憶手段と、前記第1移動体停止判定手段により移動体が停止していると判定された後に前記第2移動体停止判定手段により移動体が停止していると判定された場合に、前記記憶手段に記憶された移動体位置情報を、現在の移動体位置情報として出力する。
(もっと読む)
歩行ナビゲーション方法、システムおよびプログラム
【課題】 自律航法による歩行ナビゲーションの精度を向上させる。
【解決手段】 単位質量に作用する重力と慣性力の合成ベクトルを示すデータを加速度データとして出力する三次元加速度センサから前記加速度データを任意区間内の離散時間に取得し、前記加速度データに基づいて前記三次元加速度センサの加速度の水平成分と鉛直軸成分とを導出し、前記加速度の水平成分の分布の長軸である水平振動軸の前記三次元加速度センサの姿勢を基準とする傾きを統計演算により導出し、前記加速度の前記水平振動軸成分の振動位相と前記加速度の鉛直軸成分の振動位相とのずれに基づいて前記水平振動軸に平行な二方向のうちいずれか一方向を前記任意区間における前記三次元加速度センサの姿勢を基準とする歩行方向として判定する、ことを含む。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
ナビゲーションシステムおよび案内経路の更新方法
【課題】簡単な作業により、探索した案内経路を変更すること。
【解決手段】ナビゲーションシステム1は、携帯入力装置4と、ナビゲーション本体2と、を有する。携帯入力装置4は、複数の座標パターン13と重ねて地図が印刷された印刷物5の紙面を読み取った軌跡を示す複数の読取座標データ51を有する読取データ46を生成する。ナビゲーション本体2は、案内地点の設定に基づいて案内経路72を生成する案内経路生成手段132と、携帯入力装置4が生成した読取データ46の複数の読取座標データ51に基づいて、案内地点とは異なる地図中の指定通過地点あるいは指定通過経路を特定する指定特定手段134と、案内経路生成手段132により生成された案内経路72を、指定特定手段134により特定された地図中の指定通過経路あるいは指定通過地点を通過する案内経路72へ更新する案内経路更新手段132と、を有する。
(もっと読む)
運転支援装置
【課題】注意力が欠如した運転者が注意力を回復させた場合に、自身が置かれた状況を迅速かつ適切に認識できるよう支援する運転支援装置を提供すること。
【解決手段】運転支援装置Sは、運転者の注意力を判定する注意力判定手段11と、注意力判定手段11により運転者の注意力が欠如していると判定された場合に運転者に運転情報を通知する運転情報通知手段12とを備える。また、運転支援装置Sは、運転者の注意力を喚起する注意力喚起手段13を備え、注意力喚起手段13により運転者の注意力が喚起されたときに運転情報通知手段12が運転情報を通知するようにしてもよい。運転情報通知手段12は、複数の運転情報を所定の優先順位に基づいて順次通知し、運転情報には、先行車の有無に関する情報が含まれ、先行車がある場合には、先行車と自車との間の距離に関する情報が含まれる。
(もっと読む)
歩行者用の経路案内装置及び携帯電話機
【課題】自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る歩行者用の経路案内装置を提供すること。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
(もっと読む)
ナビゲーション装置、位置検出方法及び位置検出プログラム
【課題】測位情報を取得できないときであっても、移動体の速度及び現在位置を高精度に算出できるようにする。
【解決手段】自律速度算出ユニット11は、クレードル着脱検出部16からの着脱情報CDを基に、ナビゲーション装置1がクレードル4に装着されている場合、学習した取付傾きを用いて高精度な自律速度Vtを算出することができ、一方ナビゲーション装置1がクレードル4から取り外されたことを認識した場合、学習したセンサ座標系が変化したことを認識して学習結果である加速度センサ14の取付傾きを用いた自律速度Vtの算出を中止するため、誤った自律速度Vtの出力を未然に防止することができ、ナビゲーションユニット12における現在位置の算出精度を低下させずに済む。
(もっと読む)
201 - 220 / 278
[ Back to top ]