
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
2,201 - 2,220 / 2,582
施設表示装置
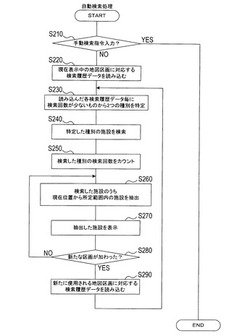
【課題】 使用者に対して、より多くの施設の情報を効率よく知らせることが可能な施設表示装置を提供する。
【解決手段】 ナビゲーション装置1は、手動検索処理及び自動検索処理にて、施設の検索を行う度に、その検索した施設の種別に対応する検索回数をカウントする。そして、自動検索処理の実行時には、その検索回数が最も少ない方から2つの種別の施設を施設データの中から検索して、その検索した施設を表示部16に表示する。よって、ナビゲーション装置1によれば、自動検索処理の実行時には、検索回数が最も少ない方から2つの種別の施設を表示部16に表示していくので、使用者に対して、より多くの施設の情報を効率よく知らせることができる。
(もっと読む)
ナビゲーションシステム、及び、地図表示方法

【課題】目的地として直接設定することが困難或いはできない地点を目的地として設定するときのユーザの操作負担を軽減する。
【解決手段】所定のユーザ・オペレーションに応じて該目的地の位置修正を行う位置修正手段と、位置修正手段による該目的地の修正位置情報をその修正前の位置情報に関連付けて記憶する修正情報記憶手段と、地図データ検索時において検索対象の目的地と関連付けられた修正位置情報が修正情報記憶手段に記憶されているか否かを判定する修正情報判定手段とを備え、修正情報判定手段により該修正位置情報が記憶されていると判定される場合、当該修正位置を目的地としてその周辺の地図を抽出して表示するナビゲーションシステムを提供する。
(もっと読む)
駐停車違反抑止システム
【課題】ユーザが道路交通法の定める駐停車禁止区域で駐停車しようとした場合に、より効果的に駐停車違反を抑止する駐停車違反抑止システムを提供する。
【解決手段】標識や信号などの路上施設にRFIDタグを埋め込み、車速が所定の閾値以下になった場合(S110)に車両からタグ内に記憶された標識情報を読み取る(S120)。その中に駐停車禁止情報がある場合(S130:yes)で、且車両が駐停車している場合(S140:yes)には、駐停車違反を行った旨をユーザに報知し(S150)、さらには近くにある駐停車可能区域への表示・音声案内・経路案内を行う(S160)。
(もっと読む)
車両走行位置推定システム及び車両走行位置推定方法
【課題】マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても車両の正確な道路の幅方向の走行位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法を提供する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
(もっと読む)
測位装置及び測位方法
【課題】電波航法により絶対位置、絶対速度を得ることができない場合、或いは、電波航法による測位精度が低い場合でも、自律航法における測定誤差を的確に推測する。
【解決手段】電波を受信している衛星の数や配置等に基づいて、電波航法で得られる絶対測位情報が高信頼度であるかを判定し(ステップS2)、高信頼度であるときには、電波航法による絶対測位情報を利用して、自律航法による測位結果の測定誤差を推定する(ステップS4)。電波航法による絶対測位情報が高信頼度でない場合は、捕捉衛星の中から受信パワーや仰角がしきい値よりも大きい高信頼度衛星を選択し(ステップS5)、この高信頼度衛星との間の擬似距離及びドップラ周波数を算出しこれを利用して、自律航法による測位結果の測定誤差を推定する(ステップS6)。そして推定した測定誤差を用いて自律航法による測位結果を補正し、測位装置10本体の測定位置を得る。
(もっと読む)
運転支援画像表示装置及びプログラム
【課題】交差点での右折時における運転支援画像の表示について、自車両前方や右折先の様子を運転者がより認識しやすい状態で運転支援画像を表示するための技術を提供することを目的とする。
【解決手段】自車両の走行に伴い通常のナビゲーション画面を表示する(S10)。ここで、交差点手前の支援開始ポイントに到達したと判定した場合(S20:YES)、路上に設置されている路側機及び自車両周辺の他車両から提供情報を受信し、これに基づいて運転支援画像(初期視界)の表示を開始する(S50)。初期視界での運転支援情報の表示開始後、所定の視界移動開始時期なったと判定した場合(S60:YES)、S70〜100において運転支援画像の視界を初期視界から所定のタイミングで徐々に移動させることで、画面上で自車両前方の対向車線又は右折先の車線が表示される範囲を広げて運転支援画像を表示する。
(もっと読む)
経路探索装置、ナビゲーション装置および交通情報収集装置
【課題】実際の道路事情に合わせて交差点の通過し易さを考慮した案内経路を探索する。
【解決手段】プローブカーの走行によって収集された各地の交差点内の進入リンクに対する退出リンク毎の通過時間に応じた交差点内通過コストを格納するデータベース3aを備え、このデータベース3aに格納された交差点内通過コスト含むノードコストと交差点間のリンクのリンクコストを用いて経路コストを算出し、出発地から目的地までの経路コストが最小となる経路を探索する(S400)。
(もっと読む)
車両用ナビゲーション装置盗難防止システム
【課題】車両用ナビゲーション装置の盗難を防止できるシステムを提供する。
【解決手段】ETCカードが着脱自在に装着されるETC車載器と、車両用ナビゲーション装置とを備える。また、ETC車載器に前記ETCカードが装着されているか否かを判断する装着状態判断手段と、ETC車載器に前記ETCカードが装着されていないと判断された場合車両用ナビゲーション装置の機能を制限する機能制限手段とを備える。車両用ナビゲーション装置のみ盗難されても利用できなくなるため、盗難防止に役立つ。
(もっと読む)
車両位置予測方法及び装置
【課題】GPS三次元測位が不能になった後三次元測位が再開されたとき、その間の勾配が大きくても正確な車両位置の選択が可能な車両位置予測方法及び装置とする。
【解決手段】GPSで三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、走行履歴と車速データにより現在の車両位置から移動する可能性のある予測移動範囲を演算し、GPSによる三次元測位が行われないとき、二次元測位、或いはジャイロと車速信号により車両位置を予測する。GPS測位車両位置が前回演算した予測移動範囲に存在するときには、通常その車両位置を採用し、存在しないときには前記予測した車両位置を採用する。しかし、三次元測位から二次元測位等に切り替わり再度三次元測位を行うとき、その間の距離が所定以上で勾配が所定以上の時には、三次元測位再開時の測位地点が予測移動範囲に存在しないときでも三次元測位位置を選択し、以前の走行履歴を削除する。
(もっと読む)
位置情報取得システム
【課題】GPSを利用した位置情報取得システムでありながら、誤差の少ない正確な位置情報の取得を実現できるようにする。
【解決手段】圃場の進入口に配置され且つ識別情報IDを有するRFIDタグ41と、RFIDタグ41の識別情報を読み取るタグリーダ42と、人工衛星STからの電波にて自己の測定位置情報を検出する移動局ユニット43と、RFIDタグ41の基準位置情報を識別情報に対応させて予め記憶した外部サーバ44と、トラクタ1に搭載したコントローラ40とを備える。タグリーダ42と移動局ユニット43とはトラクタ1に搭載する。コントローラ40は、トラクタ1が圃場の進入口にあるときに基準位置情報を外部サーバ44から取得し、このときの測定位置情報と基準位置情報とから補正情報を算出し、補正情報と測定位置情報とに基づいて、トラクタ1の現在の自己位置情報を算出する。
(もっと読む)
ナビゲーション装置
【課題】ユーザが疑問に感じた現象が発生した場合に、その現象の解析結果を速やかに得ることができるナビゲーション装置を提供する。
【解決手段】指示を入力する入力手段3と、自車の位置および方位を検出する位置方位検出手段2と、地図情報を取得する地図情報取得手段1と、地図情報取得手段で取得された地図情報に基づき、位置方位検出手段で検出された位置から、入力手段から入力された目的地までの最適経路を計算する経路探索手段4と、この最適経路を含む情報を処理するためのアプリケーションプログラムを実行する制御手段5と、アプリケーションプログラムの処理結果を出力する出力手段6と、アプリケーションプログラムの処理において発生されたナビゲーション情報および自車の状態を表す車両情報をログ情報として記憶する記憶手段7と、入力手段からの指示に応じて、記憶手段に記憶されているログ情報を外部に送信する送信手段8を備えている。
(もっと読む)
省エネ運転支援システム
【課題】燃費が悪い運転をしている運転者に対してリアルタイムで通知して、運転技術を改善する省エネ運転支援システムを提供する。
【解決手段】車両用ナビゲーション装置2から、車両の現在位置情報と、目的地までのルートの地形情報を取得する。これらの情報を使って、車両の燃費が最もよくなるギア操作位置またはエンジン回転を算出し、運転者に通知する。これにより運転者は、燃費が最もよくなるギア操作位置とエンジン回転数をリアルタイムで知ることができ、運転技術の向上が図れる。
(もっと読む)
地図表示システム、地図配信装置および地図表示装置ならびに地図表示方法
【課題】ユーザが所望する案内情報を見やすい形で表示することができる地図表示システムを提供する。
【解決手段】地図表示システム10は地図表示装置20と地図配信装置30からなる。地図配信装置30のアイコンデータベース38には、ノード属性情報に対応した動画で構成されたアイコンのデータを蓄積し、地図表示装置20から要求された地図データと、ノードの属性情報に応じて移動手段が変わるノードを案内ポイントとして当該ノードの属性に応じたアイコンを当該地図表示装置20に配信し、地図表示装置20は、地図を表示する表示部23を備え、地図配信装置30から受信した地図データおよび案内ポイントに基づいて、表示部23に地図を表示するとともに、当該案内ポイントに応じたアイコンを表示する。
(もっと読む)
情報処理装置及び補正値複合方法及びプログラム
【課題】差動衛星測位方式による測位の精度を向上することを目的とする。
【解決手段】補正値生成局200において、基準局通信局210は各基準局100から観測値を収集する。生成局220は各基準局100の観測値を基に各基準局100の補正値を生成する。さらに複数種設定した基準局の組合せに対して、その組合せ内で各基準局の補正値を比較して基準局に依存する異常値を検出し除去する。さらに生成局220は、異常値が除去された補正値をその組合せ内で複合して高品質な複合補正値を生成する。移動局300または補正値生成局200は、移動局300の概略位置を囲むような基準局の組合せを抽出する。その組合せリストの中から、過去にその移動局300に対して配信した複合補正値の基準局組合せと比較して閾値以下の数だけ異なる基準局組合せを選択する。その複合補正値を移動局300に配信する。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】トラクタ10に設けた電子制御機器(ECU)11は、GPS13からの電波の受信により割り出して得られる各圃場ごとに圃場NOを付与した地図情報上のトラクタの所在する圃場NOを情報端末モニタ画面12に表示できるようにし、トラクタのECUと、該ECUに接続された携帯端末から無線通信により前記圃場NOを含む各種情報を基地局に発信する。携帯端末が基地局へ各種情報を送信する時に自動的に無線通信を開始し、基地局での前記各種情報の受信完了時点で無線通信を自動的に切断する携帯端末の通信制御機構と、前記圃場NOが携帯端末から入力されると、GPSからの電波の受信により割り出した農業機械の圃場識別情報を正しい圃場NO情報に補正してトラクタの情報端末モニタ画面に表示させる指令を基地局に送る圃場識別情報補正制御機構とを備えている。
(もっと読む)
ナビゲーション・システム内での反復拡張カルマン・フィルタを実施する方法及び装置
【課題】慣性測定装置、位置決め装置及び処理装置(70)を備える車両用のナビゲーション・システム(10)を提供する。
【解決手段】慣性測定装置は、車両の運転に関する第1のセットのデータを提供するように構成され、位置決め装置は、車両の運転に関する第2のセットのデータを提供するように構成れる。処理装置は、慣性測定装置及び位置決め装置が提供するデータのセットを受信するように構成され、処理装置は誤差処理装置を備える。誤差処理装置は、処理装置が受信したデータのセットに関係する時間更新誤差状態及び測定更新誤差状態を用いてプログラムされるものであり、第1の基準に基づいて時間更新誤差状態及び測定更新誤差状態の双方を繰り返し、第2の基準に基づいて測定更新誤差状態のみを繰り返すように構成される。
(もっと読む)
トンネル内位置検出装置
【課題】 GPS衛星からの電波が受信できないトンネル内でも、自車位置が正確を正確に検出することができる「トンネル内位置検出装置」を提供する。
【解決手段】 マイクロコントローラ112は、光センサ106の出力に基づき、車両がGPS衛星からの電波が受信できないトンネル内に進入したと判定すると、トンネル内位置検出プログラムを起動する。これにより、車両に設置された撮像カメラ102、104はトンネル内を撮像し、画像処理部110によってトンネル内の照明と自車位置との相対的な位置関係を検出する。この相対的な位置関係に基づき、それぞれの照明間における自車の左右位置、前後位置を算出することで、トンネル内の自車位置を検出する。これにより、トンネル内での正確な自車位置が特定され、ユーザに対して正確な誘導案内を提供することを可能にする。
(もっと読む)
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部220による探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置が得られると、再ルート探索条件設定部231が、センサデータ処理部210から報告された移動状況情報を検出するセンサの検出結果精度に基づいて、マップマッチング位置の精度が低いと評価できるか否かを判定する。この判定の結果が否定的であった場合には、再ルート探索条件設定部231は、通常の再ルート探索条件である第1再ルート探索条件を設定する。一方、当該判定の結果が肯定的であった場合には、再ルート探索条件設定部231は、第1再ルート探索条件よりも条件満足までに時間がかかる第2再ルート探索条件を設定する。設定された再ルート探索条件が満足されると、再ルート探索が行われる。
(もっと読む)
ナビゲーション装置、オーディオ装置、カーオーディオシステム、これらの制御方法及び制御プログラム
【課題】一般道又は高速道といった道路種別に応じ、オーディオ装置のイコライザー設定を自動的に変化させることにより、音量や音質を安定させながら、音響の聴き易さを効果的に確保すること。
【解決手段】判断送信手段73は、自車位置取得手段71の判断した位置情報と、地図データ記憶部50に記憶された地図データ5と、に基いて、現在走行中の道路区間が少なくとも一般道か高速道かを含む道路種別を判断し、その道路種別を表す情報を接続部16及び信号伝達路Rを経てオーディオ装置2に送信する。オーディオ装置2の切替手段81は、受信した前記情報の表す道路種別に応じた前記イコライザー設定パタン、すなわち、一般道用パタンP1、又は高速道用パタンP2などを設定記憶部80から読み出すとともにイコライザー部23に設定適用する。
(もっと読む)
N分割巡回経路探索システム、経路探索サーバ、N分割巡回経路探索方法
【課題】巡回すべき多数の地点を複数の分割グループに分け、各分割グループ内の各地点を巡回する分割巡回経路のコストがほぼ均等になるように、同時に各分割巡回経路を探索する。
【解決手段】地点分割手段210が分割数に従って巡回対象の各地点を分割グループに分け、巡回対象の全ての2地点間の最短経路を探索し記憶しておき、GA処理手段155が遺伝アルゴリズムを用いて分割グループ内の各地点の巡回経路の評価値を経路コストの和として算出し、評価値が既存集団における遺伝子より良い評価値であれば遺伝子集団に加えて分割巡回経路探索を進め、SA処理手段211がシミュレーテッドアニーリング法により、所定の試行回数に達するか、指定試行回数の間、前記最良解が更新されなくなるまで、任意の複数の分割グループ内の任意の各1つの地点を選択して分割グループを入れ換え、GA処理手段155が探索した評価値を評価して前記最良解を更新する。
(もっと読む)
2,201 - 2,220 / 2,582
[ Back to top ]