
Fターム[2F129BB46]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | DGPS (289)
Fターム[2F129BB46]に分類される特許
181 - 200 / 289
移動体用測位システム及びこれに用いる装置

【課題】早期に擬似距離のばらつきを収束させること。
【解決手段】第1移動体に設けられ、衛星からの信号の受信結果に基づいて該衛星と該第1移動体との間の擬似距離を算出する第1擬似距離算出手段と、第2移動体に設けられ、前記衛星からの信号の受信結果に基づいて該衛星と該第2移動体との間の擬似距離を算出する第2移動体側擬似距離算出手段と、前記第1移動体及び前記第2移動体のうちの少なくとも一方の移動体に設けられ、前記第1移動体と前記第2移動体との間の距離を算出する手段と、前記算出された衛星と第2移動体との間の擬似距離、及び、前記算出された第1移動体と前記第2移動体との間の距離を用いて、前記第1移動体と衛星との間の擬似距離を算出する第2擬似距離算出手段と、前記第1及び第2擬似距離算出手段によりそれぞれ算出された擬似距離を結合して、1つの結合擬似距離を算出する結合擬似距離算出手段と、該結合擬似距離算出手段により算出された前記結合擬似距離を用いて前記第1移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム

【課題】到達可能範囲の示す到達可能時間内で辿るべき経路を示すナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供する。
【解決手段】任意の地点から所定時間内に到達可能な到達可能範囲を地図上に重畳表示するナビゲーション装置であって、任意の一地点から所定時間内に到達可能な到達可能範囲を算出する到達可能範囲算出部と、到達可能範囲算出部が算出した到達可能範囲内の経路の中から、当該到達可能範囲の示す到達可能時間内で辿るべき推奨経路を抽出する推奨経路抽出部と、到達可能範囲算出部が算出した到達可能範囲と推奨経路抽出部が抽出した推奨経路とを地図上に重畳表示する表示制御部とを備える。
(もっと読む)
認知地図形成補助装置
【課題】車両乗員の認知図作成を適切に補助することが可能な認知地図形成補助装置を提供すること。
【解決手段】車両に搭載される認知地図形成補助装置(1)であって、車両の走行環境を検知する走行環境検知手段を備え、走行環境検知手段により検知された車両の走行環境に関連付けられた地理的質問を乗員に出題することを特徴とする、認知地図形成補助装置。
本装置は、例えば、一般的な車載ナビゲーション装置のハードウエア構成を基本として構成可能である。
(もっと読む)
ナビゲーション装置
【課題】直感的に混雑度を判断できる到達可能範囲を示すナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供する。
【解決手段】任意の地点から所定時間内に到達可能な到達可能範囲を地図上に重畳表示するナビゲーション装置であって、渋滞情報を取得する渋滞情報取得部と、任意の一地点から所定時間内に到達可能な渋滞情報を加味しない第1の到達可能範囲を算出する第1の到達可能範囲算出部と、任意の一地点から所定時間内に到達可能な渋滞情報を加味した第2の到達可能範囲を算出する第2の到達可能範囲算出部と、第1の到達可能範囲算出部が算出した第1の到達可能範囲と第2の到達可能範囲算出部が算出した第2の到達可能範囲との差分情報を地図上に重畳表示する表示制御部とを備える。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム
【課題】到達可能範囲の表示を最適化することができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供する。
【解決手段】任意の一地点から所定時間内に到達可能な到達可能範囲を地図上に重畳表示するナビゲーション装置であって、任意の一地点を含む地図を表示する表示部と、表示部に表示される地図の縮尺に基づいて、任意の一地点から所定時間内に到達可能な到達可能範囲を前記表示部に表示するか否かを管理する表示管理部と、表示管理部が前記到達可能範囲を表示すると判断したときのみ、到達可能範囲を前記地図上に重畳表示する表示制御部とを備える。
(もっと読む)
運転行動推定方法および装置
【課題】運動行動の推定精度の高い運転行動推定装置を提供する。
【解決手段】自車両の現在位置を表す位置情報を求める位置算出部30と、目的地の設定や最適な経路の設定などを行う経路設定部31と、経路設定部31にて設定された経路に従って、経路中に設定される直近の対象ポイントまでの距離を算出する距離算出部32と、運転者の運転操作の傾向を表すテンプレート重み係数を記憶するパラメータ記憶部33と、運転者の運転操作が反映される車両情報及びテンプレート重み係数に基づき運転者の行動を推定する運転行動推定部35と、対象ポイントでの運転者の運転行動を認識する運転行動認識部36と、運転行動推定部35による推定結果と運転行動認識部36による認識結果とが一致した場合に、運転者の運転操作の傾向に関する学習を行うためにテンプレート重み係数の更新を行う運転行動適応部38とを備えている。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
道路のデジタルモデル構築方法
本発明は、ディファレンシャルグローバルポジショニングシステム(DGPS)を使って道路ジオメトリーに関する1番目のデータセットを収集し、グローバルポジショニングシステム(GPS)とハイブリッドさせた慣性航法装置を使って道路ジオメトリーに関する2番目のデータセットを収集し、当該1番目および2番目のデータセットの値をその信頼レベルの確定によりインデックス化し、予め定められた信頼閾値に達しない当該1番目および2番目のデータセットの値を削除し、修正された1番目および2番目のデータセットを得、当該修正された1番目および2番目のデータセットのデータを集合させ、道路デジタルモデルを得ることにあるステップを含むことを特徴とする、道路デジタルモデル構築方法に関する。ナビゲーション用道路マッピングおよび道路管理分野への、適応型局所アルゴリズム生成のためのアプリケーションである。 (もっと読む)
ナビゲーション装置
【課題】計算負荷をより低減させながらも時々刻々と変化する渋滞状況を考慮した適切な経路を運転者に提示するナビゲーション装置を提供すること。
【解決手段】探索範囲を複数のエリアR1乃至R3に分割し渋滞情報を考慮して経路探索を行うナビゲーション装置100は、交通情報に基づいて所定時刻における予測渋滞情報を生成する予測渋滞情報生成手段11と、車輌が各エリアに到達する時刻における予測渋滞情報を各エリアに適用する予測渋滞情報適用手段12とを備える。また、ナビゲーション装置100は、現在地Pを中心とする同心円群で区切られた領域を複数のエリアR1乃至R3として設定するエリア設定手段13を備え、同心円群は、地域別または時間帯別に予め定められた一定距離刻みで半径が増大する。
(もっと読む)
道路標高推測装置
【課題】地図データ、メッシュ標高データ、及び、あらかじめ把握することのできる道路設計基準データに基づいて、道路の標高を推測することによって、高い精度で道路の標高を推測することができるようにする。
【解決手段】地図情報中の道路情報を記憶する道路情報記憶手段と、道路上の実際の標高を特定することができる特定点データを記憶する特定点データ記憶手段と、地形の標高を示す標高データを記憶する標高データ記憶手段と、道路設計基準データを記憶する道路設計基準データ記憶手段とを有し、道路情報と、標高データとに基づいて各道路上の標高を推測し、特定点データと、道路設計基準データとに基づき、推測された各道路上の標高を補正して道路標高推測データを算出する。
(もっと読む)
車両用運転支援システム
【課題】渋滞の原因となる事象が突発的に発生した場合でも、迅速且つ的確に渋滞予測を行うことができる運転支援システムの実現。
【解決手段】運転支援システムを実現するECU5は、他車情報から渋滞原因の発生を検出する渋滞原因検出ブロック5A、渋滞原因が発生した路線上に存在する他車情報とその路線の道路情報とから交通密度を算出する交通密度算出ブロック5B、渋滞情報をドライバに情報提供する情報提供ブロック5Cを有する。
(もっと読む)
地上位置を決定するための方法
【課題】ナビゲーションシステムによって決定されるユーザ受信器の地上位置の精度を向上させる方法であって、移動体参照受信器が使用される方法に関する。更に対応する装置に関する。
【解決手段】複数の検知された定置ランドマークによって、移動体参照受信器の補正された地上位置と位置誤差が算定され、複数の位置誤差から平均位置誤差を算定することができる。
(もっと読む)
経路案内表示装置及び経路案内方法
【課題】自車両が走行する走行車線の路面の視認性を低下させることなく、高い視認性を確保した経路案内を実行する。
【解決手段】経路を案内する経路案内図形PL,PRを生成し、生成した経路案内図形PL,PRを、経路案内用の画像中の探索された経路に該当する道路画像上以外の領域に、道路画像を明示するように重畳させ、経路案内図形PL,PRを重畳された経路案内用の画像を表示することで実現する。
(もっと読む)
車両用運転支援システム
【課題】他車を精度良く自車の地図データ上にマッピングすることができ、他車との衝突可能性判定を精度良く行うことができる運転支援システムを実現する。
【解決手段】マッピングブロック5Aでは自車及び他車を地図DB上にマッピングし、他車交差点抽出ブロック5Bでは他車の走行路上の交差点列を抽出し、自車交差点抽出ブロック5Cでは自車前方の交差点列を抽出し、衝突交差点特定ブロック5Dでは他車交差点列と自車交差点列とを比較して、一致した交差点を衝突する可能性のある衝突交差点として特定し、情報提供ブロック5Eでは衝突交差点までの距離と車速とから衝突交差点までの到達時間を算出し、算出結果を元に情報提供する。
(もっと読む)
車両用情報提供システム
【課題】車両運転者に提供される公共交通機関に関する情報の量及び提供タイミングを適切なものとし、車両運転者に煩わしいとの印象を与えないようにした車両用情報提供システムを提供すること。
【解決手段】車両運転者に公共交通機関に関する情報を提供する車両用情報提供システムにおいて、車両運転者の公共交通機関利用予定と当該車両の現在位置とに基づいて、予定の便に間に合うか否かを判定し、間に合わないと判定されたときには、当該利用予定の重要度を判定し、該重要度が所定レベル以上と判定されたときには、間に合う別の便を検索しない。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 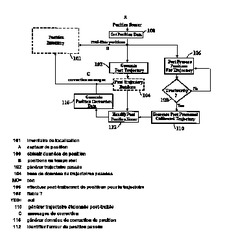 (もっと読む)
(もっと読む)
交通情報管理システム及び交通情報管理方法
【課題】今後の道路状況について知ることができるようにする。
【解決手段】情報提供者によって提供される交通情報を受信する受信処理手段91と、交通情報を蓄積データとして蓄積する情報蓄積処理手段と、ナビゲーション装置から加工指示を受信したかどうかを判断する受信判断処理手段と、加工指示を受信したと判断された場合、情報提供者から受信した交通情報及び蓄積された蓄積データを加工することによって作成された交通情報をナビゲーション装置に送信し、加工指示を受信していないと判断された場合、情報提供者から受信したままの交通情報をナビゲーション装置に送信する送信処理手段とを有する。蓄積データを加工することによって作成された交通情報を送信し、又は情報提供者から受信したままの交通情報を送信するので、操作者は、現在の道路状況及び今後の道路状況について知ることができる。
(もっと読む)
経路案内装置
【課題】ユーザの意図が適切に反映された態様で目的地案内を終了させることができる経路案内装置の提供。
【解決手段】ユーザによる情報の入力が可能な入力装置130に接続され、自車の位置を検出する自車位置検出部102と、入力手段を介して設定された目的地(以下、「設定目的地」という)まで経路案内を行う経路案内部104とを備える経路案内装置100において、経路案内部104が、自車位置が設定目的地に対して所定の第1距離L1内に至るまで経路案内を継続する第1の案内モードと、自車位置が設定目的地に対して前記第1距離よりも長い第2距離L2内になるまで経路案内を継続する第2の案内モードとを備え、入力装置130を介して入力された切替指令に応じて、経路案内部104の案内モードを切り替えるモード切替部112を備えることを特徴とする。
(もっと読む)
測位装置及び初期化方法
【課題】移動局の動きによらず、慣性航法機器の初期化を可能にする。
【解決手段】回転レバー,移動レバーの状態により、初期化方法を選択する測位装置として、直行する3軸の角速度と加速度を出力する慣性センサ手段と、測位情報の信号により位置及び速度を出力する受信手段と、クローラを稼動させる移動レバーがオフで、クローラの上にある筐体を回転させる回転レバーがオンである場合、受信手段からの出力位置をもとに筐体の位置,方位及び姿勢を計算し、移動レバーがオンである場合、受信手段の出力位置及び速度,慣性センサ手段の出力角速度及び加速度をもとに出力角速度及び加速度のドリフト量と、位置,速度,方位及び姿勢の誤差量を計算し、ドリフト量及び誤差量だけ補正して、筐体の位置,方位及び姿勢を計算する演算手段を備える。
(もっと読む)
全視野のコヒーレントなGPS信号擬似ランダム雑音(PRN)コード捕捉及びナビゲーション解決定のための全地球測位システム(GPS)ユーザ受信機および幾何学的表面処理
GPS装置のより強固な検出、捕捉、位置決め解能力を可能にする方法およびシステムである。システムおよび方法はGPSユーザ受信機の位置を予測するために、一度に一つのGPS信号の捕捉ではなく、同時的な全視野のコヒーレントなPRNコード信号処理方式に基づいたGPS衛星距離信号を使用する。さらに、画像処理技術、超密着結合処理技術、またはその組合せはさらにユーザ受信機の位置決定の正確性を強化するために使用される。信号処理技術はGPS衛星距離信号が個別に検出されることができないとき、或いは1または2のみの強いGPS衛星距離信号が弱い信号環境、混雑状態、その組合せにおいて個別に検出されることができるときGPSユーザ受信機の位置を決定するために使用される。 (もっと読む)
181 - 200 / 289
[ Back to top ]