
Fターム[2F129BB46]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | DGPS (289)
Fターム[2F129BB46]に分類される特許
261 - 280 / 289
IP及びVOIPデバイスの位置を求めるシステム及び方法
汎用IPネットワーク接続デバイスの位置を正確に特定する方法及びシステム。本方法は、戦略的ネットワークポイントに配置されるリモートインテリジェンスを使用して、関連補助データを受信機内蔵IPデバイスに配信する。補助手段を調整して、物理タイミング、周波数及び時刻信号ステータスデータを、汎用ブロードバンド通信プロトコルを使用して供給する。関連補助データによって、信号処理利得による補償が可能になる。信号処理利得は、微弱な又は歪んだ建物内のGNSS信号を獲得及び測定し、更に最終的に対応する疑似距離時刻成分を抽出するために必須である。本方法では、長期間に渡って観測される一連のGNSS測定値を標準の衛星航法方式を使用しながら収集し、一旦、これらの測定値が蓄積されると、標準の方式を使用して、各疑似距離を、正確な地理的位置を既知の確度で計算するために使用される利用可能な経路距離に変換する。  (もっと読む)
(もっと読む)
測位システム、情報提供装置、端末装置、情報提供装置の制御方法、情報提供装置の制御プログラム、情報提供装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体

【課題】通信基地局の大幅なシステム変更を必要とすることなく、測位端末による測位計算の誤差を低減することができる通信基地局からの信号の送信タイミングの補正値を提供することができる測位システム等を提供すること。
【解決手段】通信基地局20は、基地局タイミング信号TS1及び通信信号CS1を送信する信号送信手段を有し、端末装置20は、基地局タイミング信号TS1と基準タイミング信号TS2とのタイミング差分である総遅延dtを示す総遅延情報を生成する総遅延情報生成手段等を有し、情報提供装置60は、端末装置40の現在位置と通信基地局20の位置との間の距離Lを示す距離情報を生成する距離情報生成手段と、通信信号CS1が距離Lを伝搬するために必要な伝搬遅延時間dt3を示す伝搬遅延情報を生成する伝搬遅延情報生成手段と、伝搬遅延時間dt3以外の遅延を示す装置固有遅延情報を生成する装置固有遅延情報生成手段等を有する。
(もっと読む)
乗車位置案内システム、経路探索サーバおよびプログラムならびに乗車位置案内端末

【課題】 歩行者がタクシーで移動する場合に、目的地への有利な経路を選択できるよう、その乗車位置を案内できるようにした乗車位置経路探索システムを提供する。
【解決手段】 経路探索サーバ30は、道路ネットワークデータと歩行者ネットワークデータを含む探索用ネットワークデータ35と、経路探索手段33と、リンク抽出手段39と、乗車位置情報作成手段40を備え、リンク抽出手段39は、乗車位置案内端末20から受信した出発地に基づいて、当該出発地の位置からの距離が所定の範囲内の道路ネットワークデータ上の道路を特定して当該道路のリンクを抽出し、経路探索手段33は、リンク抽出手段39が抽出したリンクをそれぞれ出発リンクとして目的地までの経路を探索して推奨経路を決定し、乗車位置情報作成手段40は、推奨経路の情報と出発地と出発リンクの位置を乗車案内位置として含む乗車位置案内情報を作成する。
(もっと読む)
交通システム
【課題】車両とD−GPS基準局との距離にかかわらずGPS衛星からの信号に基づく車両の位置情報の補正ができ、この補正により車両の正確な位置情報が取得可能な交通システムを提供する。
【解決手段】車載器2と通信可能な複数の地上装置3を備え、車載器2は、車両GPS情報をGPS衛星からの信号を受けて取得すると共に車両GPS情報を地上装置3に送信し、地上装置3は、地上装置GPS情報をGPS衛星4からの信号を受けて取得する地上装置用GPS情報取得手段31と、地上装置GPS情報と予め設定された地上装置3の位置情報とに基づいて地上装置GPS情報に対する誤差情報を取得する地上装置用誤差情報取得手段351と、車両GPS情報を車載器2から受信する地上装置用通信手段32と、受信された車両GPS情報を誤差情報に基づいて補正する地上装置用補正手段36とを有する。
(もっと読む)
位置特定システム及び位置特定方法
移動体コントローラ装置(200)は、無線位置特定システム(204)と双方向通信システム(202)とを有し、ローバ装置(214)も、無線位置特定システム(218)と双方向通信システム(216)とを有する。コントローラ装置(200)は、ローバ装置(214)にその位置データを、ローバ装置を位置特定し、所望の場合には、迷子や落し物などにおいて探索することが可能であるように送信することを命じることが可能である。コントローラとローバとの間の相対位置を、コントローラ上に、ローバの場所を示す矢印、更には、それの移動速度、その移動の追跡や他のデータとともに表示(208)することが可能である。システムは、PDEを有するネットワーク・システム(212)と、通信機能及び算出機能の一部を行うアプリケーション・サーバ(210)とをともに動作することも可能である。 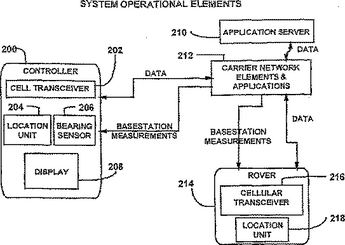 (もっと読む)
(もっと読む)
車両の運行管理システム及び車両の運行管理方法
【課題】一定のエリア内を移動する各車両を管理対象として、各車両に補正計算機能付きの高価なGPSレシーバを設けることなく、各車両と位置補正サーバとの間の位置データを補正するための無線のやり取りも行なうことなく、車両台数にかかわらず、簡単かつ安価に管理端末側で各車両の位置の精度の高い管理が行なえるようにする。
【解決手段】運行管理エリア8内の各車両6のGPSレシーバ7a及び基準点9のGPSレシーバ7bの受信位置データが無線伝送される運行管理サーバ10の位置補正部10bにより、基準点9の受信位置データと真位置データとの誤差に基づいて運行管理エリア8内に存在する各車両6の受信位置データの誤差を補正し、運行管理サーバ10のデータ配信処理手段により、各車両6の管理端末装置5に各車両6それぞれの補正後の位置データを提供する。
(もっと読む)
補正情報配信装置及び補正情報配信方法及び補正情報配信プログラム及び配信システム及び測位端末
【課題】 基準局がカバーする誤差平面エリアの境界を行き来する場合、測位結果の段差を少なくすることを目的とする。
【解決手段】 補正情報配信装置200aは、基準局U1等から個別衛星情報を受信する配信側基準局情報受信部201aと、確定位置を記憶する配信側確定位置記憶部202aと、基準局ごとに、個別衛星情報と確定位置とを使用して衛星と基準局との幾何学距離を算出し、個別衛星情報を使用して衛星と基準局との擬似距離を算出し、幾何学距離と擬似距離との差分を示す確定位置付随誤差を算出する配信側付随誤差算出部203aと、測位端末100aから測位位置を受信する配信側通信部204aと、確定位置と確定位置付随誤差とのなかから測位位置に基づき所定の確定位置と確定位置付随誤差とを選択し、選択した確定位置と確定位置付随誤差と測位位置とに基づき、測位位置を補正する補正値を算出する配信側補正値算出部205aとを備えた。
(もっと読む)
傾斜角算出装置及びナビゲーション装置
【課題】 車両自体の傾斜角を求めて、道路のみの傾斜角を正確に算出可能とする。
【解決手段】 ナビゲーション装置1は、車両の前後に取り付けるステレオカメラ10、11を具備し、水平的な姿勢における各ステレオカメラ10、11による算出距離に対応した基準距離D1、D2及び各ステレオカメラ10、11のレンズ中心間の水平距離を記憶部9に予め記憶している。各ステレオカメラ10、11が撮像した画像情報に基づき画像演算処理部8は地面までの距離を求め、求めた距離と基準距離との差及びレンズ中心間の水平距離等より三角関数を用いて車両自体の傾斜角(車両傾斜角)を算出する。算出した車両傾斜角で3Dジャイロセンサー5の検出結果より求めた傾斜角を補正して道路のみの傾斜角を得る。
(もっと読む)
車載ナビゲーション装置
【課題】 地図データに道路として登録されていない位置が推定現在位置となった場合の処理を改善したナビゲーション装置を提供する。
【解決手段】 推定現在位置zを道路上の位置にマップマッチングすることが非現実的な場合には、前回マップマッチング位置xと、推定現在位置z及び今回マップマッチング位置yそれぞれとの間の距離に基づいて、推定現在位置zと今回マップマッチング位置yとのいずれが実際の位置である可能性が高いかを判定し、推定現在位置zが実際の位置である可能性が高い場合には地図データに登録されていない道路が存在すると判断する。
(もっと読む)
測位システム及び測位方法及び移動体端末及び地図サーバ装置
【課題】 例えば、移動体端末がより短時間で測位衛星を捕捉することを目的とする。また、例えば、移動体端末が閉空間から開放空間に移動した直後の測位精度を向上させることを目的とする。
【解決手段】 受信装置700は、GPS衛星500から航法データを受信し、航法データの軌道情報を送信する。無線LANアクセスポイント600は、受信装置700が送信した軌道情報を携帯電話機300に伝送する。携帯電話機300は、無線LANアクセスポイント600から軌道情報を受信する。携帯電話機300は、閉空間から開放空間に移動すると、GPS衛星500から航法データを受信する。携帯電話機300は、受信装置700から受信した軌道情報とGPS衛星500から受信した航法データとを用いて測位を行う。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 状況に応じて精度の高い測位結果を取得する。
【解決手段】 測位サーバ100において、通信部110は移動体の擬似距離と擬似距離補正値とを受信する。擬似距離補正測位部120は擬似距離補正値で擬似距離を補正し、補正した擬似距離を用いて測位する。また、通信部110は基準局の擬似距離と移動体の単独測位の結果とを受信する。単独測位部130は基準局の擬似距離を用いて基準局についての単独測位を行う。位置補正データ生成部140は基準局の単独測位結果と正確な座標値との差分から位置補正値を算出する。位置補正データスムージング処理部150はこれまでの位置補正値を平滑化した位置補正値を算出する。位置補正測位部160は位置補正値で移動体の単独測位の結果を補正して測位する。そして、測位結果選択部170は擬似距離補正測位部120の測位結果と位置補正測位部160の測位結果とで精度の高い方の測位結果を選択し出力する。
(もっと読む)
衛星信号から導かれるドリフト推定を使用したGPS受信機の調整可能クロック
ナビゲーションシステムは、少なくとも1つの全地球測位衛星信号を受信して、全地球測位衛星情報を出力するための全地球測位衛星受信機を備える。ナビゲーションシステムはさらに、ソフトウェアを実行するために、全地球測位衛星受信機に通信できるように結合された、プログラム可能プロセッサを備える。ナビゲーションシステムはさらに、プロセッサクロック情報を出力するために、プログラム可能プロセッサに通信できるように結合されたクロックを備える。ソフトウェアは、GPS情報を使用してプロセッサクロック情報内のドリフトの量を推定し、調整済みプロセッサクロック情報を生成するために、ドリフトの量に対してプロセッサクロック情報を調整する。ソフトウェアは、少なくとも全地球測位衛星情報と調整済みプロセッサクロック情報の関数としてナビゲーション解を生成する。  (もっと読む)
(もっと読む)
位置情報管理方法、および、装置
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地図データをダウンロードして使う。
(もっと読む)
自律型GPSの高度化方法および装置
リモート受信機を測位する方法および装置を記述している。一実施例では、長期衛星追跡データがリモート受信機で得られる。移動衛星測位システム(SPS)衛星が検出される。上記リモート受信機から上記検出されたSPS衛星への擬似距離が決定される。上記擬似距離および上記長期衛星追跡データを用いて上記リモート受信機の測位が計算される。SPS衛星は、すでに計算された測位を用いて計算される捕捉支援データおよびブラインドサーチの少なくともいずれか一方を用いて検出される。長期衛星追跡データを使用することにより、上記リモート受信機が、上記衛星からのエフェメリスをデコードすることの必要性を取り除いている。さらに、上記リモート受信機の測位は、サーバまたはネットワークから初期推定測位を得ずに計算される。 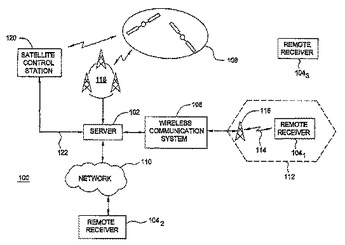 (もっと読む)
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
車両用ナビゲーション装置及び道路地図配信システム
【課題】車両が地図データにない道路を走行した場合に、その走行軌跡を高精度に求め、また、その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成すること。
【解決手段】位置検出器1からの信号に基づいて算出される自車位置の位置情報、及びマップマッチング処理によって自車位置を道路上の位置に修正したマップマッチング位置の位置情報がメモリに記憶される。これら自車位置及びマップマッチング位置に関する位置情報を用いて、自車両が地図データに記憶されている記憶道路を逸脱した地点、及び記憶道路に復帰した地点を決定する。この結果、車両が記憶道路を逸脱してから記憶道路に復帰するまでの走行軌跡を高精度に求めることができる。その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成できる。
(もっと読む)
移動端末装置及び地図データ管理方法
【課題】 移動体の過去の移動実績に基づき複数の移動ルートの中から移動に最も適した移動ルートを選択し、選択した移動ルートを適切に通知する。
【解決手段】 衛星受信部103が測位情報をGPS衛星より受信するとともに測位情報を補正するための補正情報を準天頂衛星から受信し、測位部104が測位情報及び補正情報を用いて移動体の所在位置を高精度に測位し、通行時間計測部111は移動体がルート選択対象区間を通行する度に移動ルート(車線)ごとに通行時間を計測し、予想通行時間算出部112は通行時間計測部111により計測された通行時間に基づき、移動ルートごとに予想通行時間を算出し、移動ルート選択部114は複数の移動ルートの中から予想通行時間が最も短い移動ルートを選択し、表示部106又は音声出力部115は移動ルート選択部114により選択された移動ルートを通知する。
(もっと読む)
器具の位置の非接触型決定を実行する方法及びシステム
本発明の実施形態は器具(410、540、630、720)の位置を非接触的に決定する方法或いは決定するシステムに関する。一実施形態においては、非接触型測定システムが移動機械に連結された器具の位置を決定する。移動機械の地理的位置を測定し(320)、器具(330)の地理的位置が、移動機械(330)の地理的位置及び器具の移動機械(310)に対する位置に基づいて決定する。  (もっと読む)
(もっと読む)
地図表示装置及び地図表示方法
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地データをダウンロードして使う。
(もっと読む)
基準受信機において計算した補正に基づくRTKナビゲーション用移動基準受信機
基準局と連動する主受信機とユーザと連動する副受信機との間の相対位置ベクトルを判定する方法及びシステムを提供する。本方法及びシステムは、複数の衛星から受信した信号に応じて基準局において基準局の位置を判定し、ユーザにおいて得られた測定値と基準局において計算した誤差補正値とに基づいて、ユーザにおいてユーザの位置を判定し、基準局の位置及びユーザの位置の差を取ることによって、相対位置ベクトルを計算する。 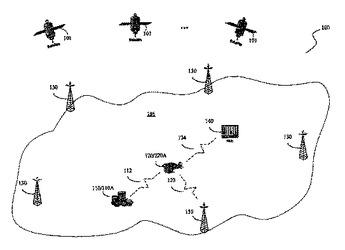 (もっと読む)
(もっと読む)
261 - 280 / 289
[ Back to top ]