
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
81 - 100 / 189
GPS受信装置
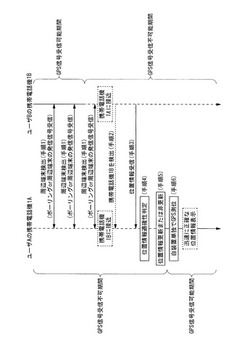
【課題】自装置の位置の検出に要する時間を短縮すること。
【解決手段】携帯電話機1Aにおいて、自装置1Aから設定距離内にある他の携帯電話機1Bから、位置情報を無線通信を介して取得し、取得した位置情報に基づいて自装置1Aの位置を検出するようにした。そのため、携帯電話機1Aは、例えば、携帯電話機1j単独でGPSに基づいて自装置1Aの位置を検出する方法に比べ、自装置1Aの位置の検出に要する時間を短縮することができる。
(もっと読む)
姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法

【課題】歩行者が携帯した場合でも自身の姿勢を特定することができる姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法を提供する。
【解決手段】座標変換部31は、装置直交3次元座標(X、Y、Z)と基準直交3次元座標(x、y、z)との間の座標変換を、ピッチ角α、ロール角β、ヨー角γをパラメータとして行う。角度算出部32は、座標変換部31での座標変換に3軸加速度センサ22で検出したデータを適用することにより、ピッチ角α、ロール角β、ヨー角γを算出する。姿勢特定部30は、基準となる基準直交3次元座標(x、y、z)に対するピッチ角α、ロール角β、ヨー角γを求めることにより、自身の姿勢を特定する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】コード位相の検出精度を高めて、測位精度を向上させること。
【解決手段】PRNコードで拡散変調されたGPS衛星信号の受信信号とPRNコードのレプリカコードとを、第1の位相探索範囲でレプリカコードの位相をずらしつつ相関積算する第1の相関積算処理を行い、第1の相関積算処理中の第1のタイミングにおける相関積算値に基づいて、第1の位相探索範囲よりも狭い第2の位相探索範囲を設定する。そして、受信信号とレプリカコードとを、第2の位相探索範囲でレプリカコードの位相をずらしつつ相関積算する第2の相関積算処理を行い、第1のタイミングにおける第1の相関積算処理の相関積算値と、第1のタイミングより遅い第2のタイミングにおける第1の相関積算処理の相関積算値とに基づいて、設定した第2の位相探索範囲の適否を判定する。そして、判定により適切と判定した場合に、第2の相関積算処理の処理結果を用いた所定の測位演算を行って測位する。
(もっと読む)
移動体用測位システム
【課題】基準局側で導出される速度補正データを用いて精度良く移動体の位置等を測位することができる移動体用測位システムの提供。
【解決手段】本発明による移動体用測位システムは、基準局20に設けられ、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて速度補正データを生成する補正データ生成手段50,52と、前記基準局に設けられ、該基準局で観測して得られる衛星電波の観測データと、前記速度補正データとを移動体に送信するデータ送信手段54と、前記移動体30に設けられ、前記基準局から送信される前記観測及び速度補正データを受信するデータ受信手段40と、前記移動体に設けられ、該移動体で観測して得られる衛星電波の観測データと、前記データ受信手段で受信した前記観測及び速度補正データとに基づいて、該移動体の位置を測位する測位手段42,44,46,48とを備えることを特徴とする。
(もっと読む)
移動体間干渉測位装置及び方法
【課題】移動体間干渉測位の精度の向上。
【解決手段】本発明による移動体間干渉測位装置は、第1移動体で観測された位相積算値に関する観測データを取得する第1観測データ取得手段と、第2移動体で観測された位相積算値に関する観測データを取得する第2観測データ取得手段と、干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする。
(もっと読む)
位置標定装置、位置標定システム、位置標定システムのユーザインタフェース装置、位置標定システムの標定サーバ装置および位置標定方法
【課題】車両が走行した位置を高精度に測位する。
【解決手段】位置姿勢標定装置100は、走行中の車両で取得された観測データ201、画像データ203およびレーザデータ205と予め位置が測量されている地物位置データ204とに基づいて車両の位置姿勢を標定する。地物DB検索GUI部120は、ユーザが指定した画像データ203を表示画像として表示し、地物位置データ204に基づいて撮像地域の地図を表示する。ユーザはランドマークが映っている画素とその地図表記とを指定する。三次元点群投影検索部140はレーザデータ205に基づく三次元点群モデル206を表示画像に投影し、指定画素に最も近い投影点を特定する。地物車両位置差分演算部150は投影点に対応するレーザデータ205を取得する。そして、車両位置姿勢標定部160はランドマークの既知座標とレーザデータ205が示す距離方位とに基づいて車両の位置を標定する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】IMM演算を用いた測位方法において、モデル確率を正しく求めるための新たな手法を提案すること。
【解決手段】カルマンフィルタ処理それぞれの尤度指標値「Vx」が算出され、この尤度指標値「Vx」のカルマンフィルタ処理間の相対値が算出される。そして、算出された相対値を用いてカルマンフィルタ処理それぞれのモデル確率「μ」が算出され、このモデル確率「μ」を用いてカルマンフィルタ処理それぞれの処理結果が合成されることで測位位置が決定される。
(もっと読む)
カルマンフィルタ処理における繰り返し演算制御方法及び装置
【目的】少ない繰り返し演算回数で高精度の位置、速度等の推定を可能にする「カルマンフィルタ処理における繰り返し演算制御方法及び装置」を提供することである。
【構成】車両の位置、速度及びセンサーの姿勢を含む状態量を推定するカルマンフィルタ処理において、カルマンフィルタ処理部14は車両の位置、速度及びセンサーの姿勢を含む状態量を演算し、カルマンフィルタ繰り返し演算停止制御部22は、演算された状態量のうち所定の状態量あるいは該状態量に応じた値について前回と今回との差分を演算し、該差分が前回の差分より大きくなったとき、あるいは、該差分が設定値以下になったとき、カルマンフィルタ処理部14による状態量の繰り返し演算を停止し、補正状態量出力部21はカルマンフィルタ処理部14により演算された状態量を補正状態量として出力する
(もっと読む)
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
GPSレシーバ
【課題】初回測位の精度が低い場合であってもその後の測定位置の精度低下を有効に避けることができるGPSレシーバを提供する。
【解決手段】GPS測位の結果に基づいてGPSレシーバが現在位置し得る第一の範囲を推定する現在位置推定手段と、第一の範囲に基づいて、過去のある時点でGPSレシーバが位置し得た第二の範囲を推定する過去位置推定手段と、過去のある時点のGPS測位で計算された過去測定位置が第二の範囲に含まれるか否かを判定する過去測定位置判定手段とを備え、過去測定位置が第二の範囲に含まれない場合には、推定位置の計算に該過去測定位置を使用しないようにGPSレシーバを構成する。
(もっと読む)
認識システム
【課題】他の通信装置から送信されてくる位置情報の精度を高めることができる認識システムの提供。
【解決手段】前方車両情報とインフラ情報とを照合し(S210〜S230)、同一の車両とみなせる情報について、位置及び速度の情報の平均を取ってその車両の情報とする(S260、S265)。また、一体の車両の情報とみなせる情報を探して(S270)、それを一体化する(S275)。さらに走行情報を用いることで未来の速度及び位置の推定値を補正する(S2800)。そして、自車線確率の計算(S290)、及び、衝突時間の計算(S293)を行い、衝突の危険がある車両に向けて自車両の情報を送信する(S295)。
(もっと読む)
水中ナビゲーションの方法およびシステム
【課題】水中ナビゲーションの方法を提供する。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
(もっと読む)
標定装置、標定方法および標定プログラム
【課題】車両の位置姿勢を標定できるようにする。
【解決手段】消失点抽出部120は、画像センサ104により車両から撮像された画像204に基づいて画像204に映っている白線の消失点実測値205を算出する。航法演算部110は、慣性センサ101とオドメトリ102とにより計測された角速度201と速度202とに基づいて車両の自己姿勢角207と自己位置206とを計測する。データベース検索部130は自己位置206と自己姿勢角207とに基づいて画像204に映っている白線の白線座標203を取得する。消失点計算部140は白線座標203と自己姿勢角207とに基づいて消失点予測値208を算出する。カルマンフィルタ部160は消失点実測値205と消失点予測値208との差分である消失点残差209に基づいて姿勢誤差推定量210を算出する。そして、航法演算部110は自己姿勢角207を姿勢誤差推定量210により補正する。
(もっと読む)
車載ナビゲーションシステム及びナビゲーション方法
【目的】開発効率化と高精度を達成するために任意のセンサー構成のシステムでも基本システムと同一のソフトウェアで制御を行なえるようにする「車載ナビゲーションシステム及びナビゲーション方法」を提供する。
【構成】車速パルスセンサー、加速度計や角速度計(ジャイロスコープ)およびGPS受信機を含む複数のセンサーを複合した車載ナビゲーションシステムにおいて、いくつかのセンサーの組み合わせで構成される複数のシステムの中から選択した所定のセンサー構成システムと全センサーを備えた基本システムとの差異を補完し、該補完された値及びシステムのセンサー出力信号を用いて自律航法計算し、基本システムの制御アルゴリズムに基づいてカルマンフィルタ処理を行って車両の位置、速度及び姿勢の推定値を得る。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】現実的な移動体の移動を想定した適切な誤差推定を実現する測位方法等を提供す
ること。
【解決手段】慣性航法演算処理により随時求められる相対高度である第1高度変化「Δh
i」と、移動体である自動車の外気圧を検出する気圧センサの検出結果に基づいて算出さ
れる相対高度である第2高度変化「Δhb」との差「δh=Δhi−Δhb」が算出される
。そして、算出された高度変化の差「δh」、慣性航法演算処理により求められる自動車
の直進方向に対する左右方向の速度「vix」、及び、慣性航法演算処理により求められる
自動車の高度方向の速度「viz」に応じた観測値を用いたカルマンフィルタ処理が行われ
て、慣性航法演算処理の演算結果「(pi,vi,Ai)」に含まれる誤差「(δp,δv
,ε)」が推定され、推定された誤差を用いて慣性航法演算処理の演算結果が補正されて
、自動車の現在位置が測位される。
(もっと読む)
航法装置
【課題】角速度センサの角速度バイアスを温度の関数として求める方法の利点と、時系列に推定する方法の利点とを併せ持ち、移動中リアルタイムに角速度バイアスを推定して高い測位精度を保てるようにした航法装置を構成する。
【解決手段】航法装置100は、GPS受信機11、振動ジャイロからなる角速度センサ13、温度センサ14、加速度センサ12、CPU等からなる統合演算部30を備えている。統合演算部30の角速度バイアス温度特性検知部22は、移動体の停止時の温度検出値と角速度の検出値とに基づいて角速度バイアスの温度特性データを求め、バックアップ部23に書き込む。GPS/INS演算部21は、角速度バイアスの温度特性データが有効であるとき、角速度センサの温度特性と温度とから求めた角速度バイアスを初期値としてGSP/INS統合演算を行い、角速度バイアス及び角速度をリアルタイムに推定して、移動体の方位を高精度に求める。
(もっと読む)
衛星航法/推測航法統合測位装置
【課題】低価格で構成でき且つ位置・速度等の航法データの精度を高めた衛星航法/推測航法統合測位装置を構成する。
【解決手段】追尾処理部31は、GPS測位信号に基づいて、その捕捉処理、追尾処理、航法メッセージの復調処理を行う。GPS測位演算部32は擬似距離観測量やドップラー周波数観測量及びエフェメリスデータを基に位置・速度等を演算し、これらを出力判定部43と追尾処理部31へ与える。統合測位演算部42は擬似距離観測量やドップラー周波数観測量の他に、慣性センサの出力や地図情報又は地図位置と測位との差の情報等の外部支援情報に基づいて、位置・速度などを推定し、出力判定部43へ与える。出力判定部43はGPS測位演算部32の出力と統合測位演算部42の出力とを比較し、統合測位演算部42の出力データの信頼性判定や外部支援データの異常判定を行う。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位装置の移動状態を適切に判定してフィルタ特性を可変することで、測位精度
の向上を図ること。
【解決手段】携帯型電話機1において、速度補正処理で補正された状態ベクトル「X」か
ら求められる携帯型電話機1の速度「V」に含まれる速度誤差「σV」(速度成分の精度
)が、速度予測処理で予測された誤差共分散行列「P」に基づいて決定され、当該速度誤
差「σV」に基づいて、携帯型電話機1の移動状態を判定するための速度閾値(速度条件
)が設定される。そして、速度補正処理で補正された状態ベクトル「X」から求められる
速度「V」と、先に設定された速度閾値とが比較されて携帯型電話機1の測位モード(移
動状態)が判定され、当該測位モードに応じたプロセスノイズ「Q」(フィルタ特性)で
カルマンフィルタ処理が実行されて、現在位置が測位される。
(もっと読む)
方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法
【課題】歩行者の移動方向の方位を精度良く特定することができる方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法を提供する。
【解決手段】位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性(例えば、道路領域)と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、位置更新部175で歩行者の位置を道路上に特定した場合、測位方位をその特定位置の道路方位に補正することにより、歩行者の移動方向の方位を特定する。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、自車両のGPS位置情報を検出するGPSセンサ11と、自車両と同一車線を走行する1つ以上の他車両でそれぞれ検出されたGPS位置情報を受信する受信部12と、GPSセンサ11により検出された自車両のGPS位置情報と、受信部12により受信された他車両のGPS位置情報と、に基づいて、自車両の走行方向に対して横方向の絶対位置を推定する車両横位置推定部17と、を備えている。
(もっと読む)
81 - 100 / 189
[ Back to top ]