
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
41 - 60 / 189
位置推定装置及びプログラム
【課題】精度よく移動体の位置を推定する。
【解決手段】車両に搭載される位置推定装置であって、GPS情報取得部20で、複数のGPS衛星の各々から発信された、各々のGPS衛星の軌道情報、GPS擬似距離データ、及びドップラー周波数情報を含むGPS情報を取得し、軌跡推定部40で、取得されたGPS情報に基づいて自車両の速度ベクトルを算出し、算出した速度ベクトルを所定時間分積算して自車両の軌跡を算出する。また、取得したGPS擬似距離データ及びGPS衛星の軌道情報から取得されるGPS衛星の位置座標を擬似距離・衛星位置記憶部に記憶しておく。そして、最適化位置推定部60で、自車両の軌跡上のエポック毎の各GPS衛星との距離と、そのエポックにおける擬似距離との擬似距離差分の全GPS衛星の全エポック数分の和が最小となるように自車両の軌跡を平行移動させて移動体の位置を推定する。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム

【課題】航法の最初から慣性計測装置のデータを高い精度で補正して高い精度で位置を標定できるようにすることを目的とする。
【解決手段】自己位置標定装置100は航法処理を2回行う。1、2回目の航法処理において、IMU処理部140はカルマンフィルタ150により算出されるIMU誤差推定値に基づいて慣性データを補正し、補正した慣性データに基づいて慣性航法により位置、姿勢および速度を算出する。カルマンフィルタ150はGPS処理部120またはODO処理部130により算出される残差に基づいてIMU誤差推定値を算出する。2回目の航法処理において、IMU処理部140は1回目の航法処理においてカルマンフィルタ150により算出されたIMU誤差推定値をIMU誤差推定値の初期値として用いる。IMU処理部140は2回目の航法処理で算出した位置、姿勢および速度を航法結果として出力する。
(もっと読む)
経路計画装置及び経路計画システム
【課題】経路計画装置は、処理負荷をへらしつつ、電気自動車の充電スタンドに、たどり着くことができないリスクを緩和する経路をユーザーに提供する。
【解決手段】経路計画装置は、現在位置から目的地までの最小コスト経路を計算し(S002)、最小コスト経路周辺の充電スタンドを予め検索し、検索した充電スタンドへ誘導する経由地点(中間点)を計算し、経由地点から施設までの誘導経路と消費電力とを予め算出する(S003)。走行中に、自車位置から経由地点までの走行に要する消費電力と、予め算出した経由地点から施設までの走行に要する消費電力との和を、電気自動車のバッテリ−残量と比較した結果に応じて、電気自動車を施設へ誘導する。
(もっと読む)
位置推定装置および位置推定方法
【課題】走行中の車両は、その路面状態や外気温や各部品の経年数、運転するドライバーの特性といった、前記のような誤差などの各種モデルを切り替えるための閾値の決定を事前に行うことが難しいような場合、事前に決められた不変の値では、モデル化誤差が大きくなり、自車位置の算出精度に大きな悪影響を与えかねない。
【解決手段】自車位置の推定精度を高精度に保つために、複数のモデルを予め用意しておき、測位に使用するモデルを切り替えるための閾値を、自車の状態、特に自車位置を算出する際に用いるために推定されるパラメータや学習されるパラメータおよび変数や係数を用いて算出し、算出された閾値に基づいて測位に使用するモデルを決定する自車位置推定装置。
(もっと読む)
移動局が関わる経路案内において用いる方法および装置
様々な方法および/または装置を用いて実装され、遅延領域情報を、経路案内において用いられる1つまたは複数の移動局により収集し、1つまたは複数のコンピューティングデバイスに提供し、何らかの方法で処理することを可能にして、経路案内に関わる移動局により用いられ得る案内情報を確立することができる、技術が提供される。たとえば、場合によっては、案内情報は、経路に従おうとする移動局のユーザに影響を与え得る、少なくとも1つの既知の遅延領域に関する、予測遅延を示すものであってよい。 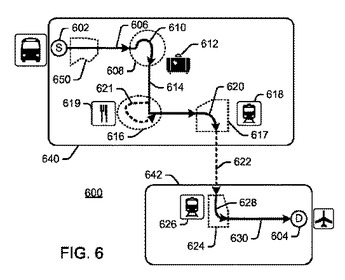 (もっと読む)
(もっと読む)
オブジェクトを使用した慣性航法システムの整合および較正
慣性航法システムの初期化が、オブジェクトの画像から取得される情報を使用して、実行される。グローバル基準フレーム内のオブジェクトに対する位置および向き情報と、前記オブジェクトに対するカメラに関する位置および向き情報が、前記画像から取得される。前記グローバル基準フレーム内の前記カメラの位置および向き情報が、慣性センサ基準フレームおよび航行座標フレームの間の変換マトリックスとともに、判断される。慣性航法システムが、前記カメラの位置および向き情報と、前記変換マトリックスと、前記オブジェクトが画像化されたときの前記カメラの速度、すなわちゼロ、とを使用して、初期化される。慣性センサからの測定値と初期化データを使用して、モバイルプラットフォームの位置が、航行中に更新され、デジタルマップ上などに、提供され得る。慣性航行エラーは、異なるオブジェクトの画像から取得される情報を使用し、修正され得る。  (もっと読む)
(もっと読む)
向き計測装置、向き計測システム、向き計測方法、及び向き計測プログラム
【課題】移動装置が、自装置の方向を正確に測定できること。
【解決手段】位置積分部1162は、位置の変化量を積分して移動ロボット1の位置を示す推定位置情報を推定する。方向積分部1161は、方向の変化量を積分して移動装置の方向を示す推定方向情報を推定する。位置補正部1163は、絶対位置測定装置から受信した位置情報であって時々刻々の移動ロボット1の位置を示す絶対位置情報と、時々刻々の推定位置情報と、を同定して、方向のずれを補正する方向補正値を算出する。方向補正部1164は、方向補正値を用いて、推定方向情報が示す方向を補正する。
(もっと読む)
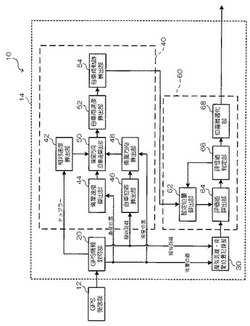
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム
【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
傾斜角検出装置、傾斜角検出方法、および傾斜角検出プログラム
【課題】加速度センサのオフセットを高精度に算出することによって、傾斜角を高精度に検出する技術を提供する。
【解決手段】加速度センサ12は、加速度信号を取得し、速度センサ10は、速度信号を取得する。誤差設定部14は、加速度センサ12の観測誤差を設定する。ゲイン演算部24、状態変数更新部26は、加速度センサ12の観測誤差と、加速度信号と、速度信号とをもとにカルマンフィルタ処理を実行することによって、車両の傾斜角と加速度センサ12のオフセットとを更新する。ここで、誤差設定部14は、速度信号と、既に更新した車両の傾斜角とをもとに、加速度センサ12の観測誤差を設定する。
(もっと読む)
GPSレシーバ及びナビゲーションシステム
【課題】GPS測位演算において測位が中断された直後の測位精度を高めること。
【解決手段】カルマンフィルタを用いたGPS測位演算を所定の周期で行うことにより自車の推定位置を算出し、デッドレコニング用のセンサの出力に基づいて自車の移動位置を算出する測位演算部を備える車載用のGPSレシーバであって、測位演算部は、非測位状態において推定位置と移動位置との距離が所定の距離よりも大きいと判定した場合に、該カルマンフィルタのフィルタリセットを実行することを特徴とするGPSレシーバ及び該GPSレシーバを備えるナビゲーションシステムを提供する。
(もっと読む)
搬送波位相を使用したフィルタモデルの適用に作用する方法および装置
ナビゲーションソリューションを取得するために使用されるフィルタモデルの適用に影響を及ぼすために、様々な電子デバイスで実施され得る方法および装置が提供される。特に、複数のフィルタモデルから特定のフィルタモデルの適用を選択するために、1つまたは複数の受信信号の信号特性が使用される。 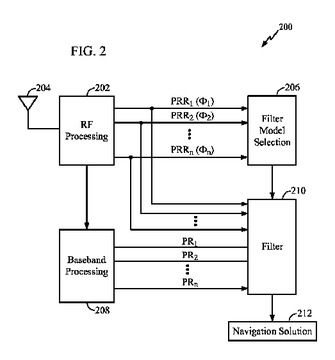 (もっと読む)
(もっと読む)
測位方法および装置
【課題】本発明は測位装置に関し、マルチパス多発地帯でも受信手段の出力の異常判定を正確に行い、測位装置の位置精度の低下を防ぐ方法および装置を提供する。
【解決手段】上記課題は、擬似距離から算出された受信位置と、ドップラ周波数から算出された受信速度及び受信方位を分けてそれぞれの有効性判定を行うことにより、受信状況が直達波,直達波と反射波の合成波,反射波であるかを判定し、直達波を受信している時には受信位置を測位位置とし、直達波と反射波の合成波を受信したときでも、受信速度及び受信方位を有効と判定できる場合には、直前の受信位置を基に受信速度及び受信方位から測位装置の位置を補正して測位位置を求めることにより解決される。
(もっと読む)
デッドレコニング装置
【課題】歩行者に装着されたセンサシステムによって人の歩行動作を計測、解析し、その移動方位と歩幅を装着型計算機システムが推定することにより、その歩行者に対して道案内などのアプリケーションを提供するために利用するデッドレコニング装置を提供する。
【解決手段】歩行動作に基づいて基準位置からの相対移動ベクトルを出力するデッドレコニング装置において、歩行動作を計測、解析して一歩ごとに歩行動作の移動方位と歩幅を推定して出力する手段と、前記出力された移動方位と前記出力された歩幅の信頼性を算定して出力する手段と、前記出力された移動方位と前記出力された歩幅に基づいて基準位置からの相対移動ベクトルを推定して出力する手段と、前記出力された移動方位と前記出力された歩幅、前記出力された移動方位の信頼性、前記出力された歩幅の信頼性に基づいて、前記出力された相対移動ベクトルの信頼性を算定して出力する手段を備える。
(もっと読む)
密接に統合されたNAV−COMの能力で既存のGNSSユーザ装置をアップグレードする実用的な方法
統合されたNav−Comの能力を、任意の全地球航法衛星システム(GNSS)のユーザ機器、例えばGPS受信機に加える方法は、既存のユーザ機器のハードウェアを修正する必要がない。この概念を防衛高度GPS受信機(DAGR)に適用して、低地球軌道(LEO)衛星、例えばイリジウムと、GPS又は他のGNSSシステムとを組み合わせて、位置、航法、及びタイミング(PNT)の、正確さ、完全性、及び利用可能性をかなり改善して、精密に結合された航法と通信のモードを合成することによって、新たな通信の拡張を利用できるようにする。既存のDAGRと差込み式のiGPS拡張モジュールとの間における、時間の同期化の安定性を、要求されるほぼ20psレベルにするために、専用の広帯域の基準信号をiGPSモジュールによって生成して、既存のアンテナポートを介してDAGRに接続して、DAGRのハードウェアの修正を不要にする。 (もっと読む)
駐車場進入/脱出検出装置及びその検出方法
【目的】駐車場進入/脱出を正確に判定できる「駐車場進入/脱出検出装置及びその検出方法」を提供することである。
【構成】 所定のタイミングで平面及び高さ方向の移動距離を計算し、上記移動距離を用いて勾配を計算し、勾配の絶対値が設定値より大きくなったとき、駐車場に進入したと判定する。前記駐車場進入が検出されたときの車両の相対高度を範囲内に含む所定の高度範囲を設定し、自車位置が前記高度範囲内に存在する場合は、脱出判定に使用する設定距離を小さくし、前記高度範囲外に存在する場合は前記設定距離を大きくし、道路と併走する併走距離を算出し、該併走距離が前記設定距離以上になったとき駐車場から脱出したと判定する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
ナビゲーション装置および車両制御装置
【課題】検知した現在地情報の信頼性を判断するナビゲーション装置および車両制御装置を提供する。
【解決手段】センサフュージョン部21はセンサ22a〜22dが検出した最新の検出値を取得して現在地を検出する。次に、各々のセンサの誤差と、検出された現在地の確からしさを表す指標値とを算出し、指標値を判定部24へ出力する。センサ監視部23はセンサ22a〜22dの状態を監視し、特定のセンサが異常な状態にある場合には異常信号を判定部24へ出力する。判定部24はまず、センサフュージョン部21が出力する指標値が所定のしきい値を上回っているか否かを調べる。上回っていた場合、スイッチ25を遮断し、自車両2に現在地情報が出力されないようにする。他方、指標値が所定のしきい値以下であった場合には、判定部24は、一定時間後の指標値の予測を行う。一定時間後の指標値がしきい値を上回る場合、自車両2に対してその時刻を通知する。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
41 - 60 / 189
[ Back to top ]