
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
101 - 120 / 189
道路白線検出方法、道路白線検出プログラムおよび道路白線検出装置
【課題】道路白線を精度良く検出することの可能な道路白線検出方法を提供する。
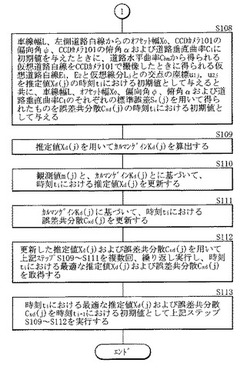
【解決手段】時刻tiにおける観測値m(j)と、推定値Xd(j)および誤差共分散Cxd(j)の時刻tiにおける初期値と、時刻tiにおけるカルマンゲインKd(j)とを求める(ステップS107,S108,S109)。次に、観測値m(j)と、カルマンゲインKd(j)とに基づいて、時刻tiにおける推定値Xd(j)を更新すると共に(ステップS110)、カルマンゲインKd(j)に基づいて、時刻tiにおける誤差共分散Cxd(j)を更新する(ステップS111)。次に、更新した推定値Xd(j)および誤差共分散Cxd(j)を用いて上記のステップS109〜S111を複数回、繰り返し実行し、時刻tiにおける道路白線の位置座標としての推定値Xd(j)を導出する(ステップS112)。
(もっと読む)
車両用現在位置検出装置及びプログラム

【課題】角速度センサのゲイン誤差の推定精度を向上させる。
【解決手段】車両の角速度を検出するジャイロ6のゲイン誤差を状態量としてその推定値をカルマンフィルタにより求める誤差推定部15と、ジャイロ6による検出値のゲイン補正に用いるゲイン補正量を、誤差推定部15により求められたゲイン誤差に基づき修正する補正部16とを備える。ここで、補正部16は、車両の旋回方向が右旋回と判定されている状態では右旋回専用のゲイン補正量をゲイン誤差に基づき修正し、左旋回と判定されている状態では左旋回専用のゲイン補正量をゲイン誤差に基づき修正する。
(もっと読む)
測位方法、プログラム、測位回路及び電子機器
【課題】直進時における出力位置の軌跡の連続性や直進性を維持しつつ、右折時や左折時等における出力位置の追従性の問題も解消すること。
【解決手段】携帯型電話機1において、受信したGPS衛星信号を用いて間欠的に現在位置の測位演算が行われるとともに、携帯型電話機1の移動方向の変化を検出するジャイロセンサ80からの検出結果に基づいて、今回の測位演算から過去所定期間の間での携帯型電話機1の移動方向の変化の有無が判定される。そして、移動方向の変化が無しと判定された場合は、今回の測位演算から過去所定期間の間の測位演算の結果を用いた多値回帰推定処理が行われて、今回の出力位置が決定される。また、移動方向の変化が有りと判定された場合は、測位演算により求められた測位位置と、推測航法により求められた推測航法位置とを用いた2値平滑化処理が行われて、今回の出力位置が決定される。
(もっと読む)
動的に較正されるセンサデータと、ナビゲーションシステム内の繰り返し拡張カルマンフィルタとを使用する、ジャイロコンパスの整合用のシステム及び方法
【課題】動的に校正されるセンサデータと、ナビゲーションシステム内の繰り返し拡張カルマンフィルタとを使用して、ジャイロコンパスを整合させる。
【解決手段】ナビゲーションシステムは、慣性測定装置及び位置決め装置によって提供される第1及び第2のデータセットを受信するように構成される処理装置を備え、処理装置は、受信された第1のデータセットを動的に較正するように構成され、カルマンフィルタを備え、最初に動的に較正された第1のデータセット、第2のデータセット、及びカルマンフィルタを使用してジャイロコンパスの整合を生成するようにさらに構成される。本方法は、複数のセンサからセンサデータを受信すること、センサデータの少なくとも一部を動的に較正すること、動的に較正されたセンサデータに基づいてジャイロコンパスの整合情報を生成することを含む。
(もっと読む)
ナビゲーション装置
【課題】加速度センサのオフセット誤差が存在する場合であっても精度良く位置を求めることが可能なナビゲーション装置を提供する。
【解決手段】加速度センサから得られる加速度と所定の閾値とを比較する加速度判定手段と、加速度判定手段により加速度の絶対値が前記閾値より大きいと判定された場合は、該加速度と記憶手段に記憶されている過去の位置および移動速度とに基づいて現在の位置を算出し、加速度判定手段により加速度の絶対値が前記閾値より小さいと判定された場合は、等速運動であるとみなして方位センサによる計測に基づく方位と記憶手段に記憶されている過去の位置および移動速度とに基づいて現在の位置を算出する位置算出手段と、を備える。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて、当該G
PS衛星信号のコード位相が測定される。そして、捕捉したGPS衛星信号の信号強度に
基づいて、当該捕捉衛星についての状態ベクトル「X」の位置補正処理で用いる測定誤差
としての位置R値の初期値が設定され、当該初期値が設定された位置R値が、当該捕捉衛
星からのGPS衛星信号を捕捉処理した際の捕捉時諸量に基づいて変更される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて距離相当
値が測定される。また、捕捉したGPS衛星信号の信号強度に基づいて当該捕捉衛星につ
いての位置補正処理で用いる位置R値の初期値が設定されるが、当該捕捉衛星の観測値「
Z」が、GPS衛星からのGPS衛星信号の受信環境に基づいて設定された適否判定条件
により不適と判定される場合は、位置補正処理で用いる位置R値が初期値より大きな値に
設定される。
(もっと読む)
移動量計測装置及び位置計測装置
【課題】簡易な構成で、ロバスト性を確保して、移動体の移動量を精度よく計測することができるようにする。
【解決手段】GPSから、第1時刻及び第2時刻の各々で測定された測位位置と、第1時刻及び第2時刻の各々における受信信号の衛星番号群とを取得し(140)、第1時刻における衛星番号群と、第2時刻における衛星番号群とが同一である場合には(144)、第1時刻及び第2時刻で測定された測位位置の変化に基づいて、自車両の車速を算出する(146)。第1時刻と第2時刻とにおいて受信信号の衛星番号群が同一でない場合には(144)、過去の衛星番号群から、第2時刻における衛星番号群と同一の衛星番号群である時刻を検索し(148)、検索された時刻に測定された測位位置と、第2時刻における測位位置とに基づいて、自車両の車速を算出する(152)。
(もっと読む)
対象特定装置、対象特定方法および対象特定プログラム
【課題】道路周辺の地物の高精度な位置情報を容易に取得できるようにすることを目的とする。
【解決手段】計測車両200は道路を走行し、カメラ240は異なる地点から同一の道路標識を撮像し、GPS受信機210は各時刻における計測車両200の位置を測定し、LRF250は道路周辺の地物に対して距離方位データを取得する。三次元点群モデル復元部130は距離方位データを座標値で表した三次元点群モデルを生成し、点群画像投影部140は三次元点群モデルを撮像画像Aおよび撮像画像Bに投影する。グルーピング部150は道路標識の撮像範囲に投影された点群を抽出し、撮像範囲内の点群をグループ分けする。そして、標識点群特定部160は撮像画像Aの撮像範囲と撮像画像Bの撮像範囲とで一致したグループの点群を道路標識の点群として特定し、標識位置計算部170は特定された点群の座標値に基づいて道路標識の位置を算出する。
(もっと読む)
ナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム及び水中システムの位置及び姿勢を測定する方法
【課題】水中の装置の位置を測定するにつき、水中での音波の屈曲により測定値の不正確が生ずる。
【解決手段】音響アレイに音速メータを備え、音響アレイによる出力データを処理構成で計算して水中の装置の位置を求めるとともに、船の直下の流体層内の音の速度を音速メータで測定して、これにより、処理構成が水中の装置の位置の計算を補正して、正確な位置を検出する。
(もっと読む)
移動体用測位装置
【課題】衛星電波の受信状態に応じた適切な誤差分散を用いて移動体の位置を測位すること。
【解決手段】本発明による移動体用測位装置は、慣性航法により前記移動体の位置を測位する慣性航法測位手段と、衛星航法により前記移動体の位置を測位する衛星航法測位手段と、前記衛星航法測位手段の測位結果と前記慣性航法測位手段の測位結果との関係を観測量とし、前記慣性航法測位手段で用いられる補正パラメータを状態量として、前記衛星航法測位手段の測位結果の誤差分散を用いて、前記状態量を推定する状態量推定手段と、前記状態量推定手段により推定された状態量を前記慣性航法測位手段の測位に反映させる手段と、前記移動体で受信される衛星電波の受信状態に応じて前記誤差分散を補正する補正手段とを備えることを特徴とする。
(もっと読む)
位置検出装置及び位置検出方法
【目的】GPS出力データの各成分について信頼度の有無及び誤差指標に基づいて補正処理を行って位置決定精度を向上する「位置検出装置及び位置検出方法」を提供することである。
【構成】GPSの測位周期で該GPSにより測定される車両の各方向位置成分データ及び速度成分データを用いて自律航法による位置計算結果及び該自律航法の位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角を補正する補正処理を行い、GPSにより測定される車両の各方向の位置成分データ及び速度成分データの信頼度を判定すると共に、信頼度ありと判定された成分の誤差指標を算出し、信頼度が無いと判定された測定成分の補正処理における貢献度を零あるいは略零にし、信頼度有りと判定された測定成分の補正処理における貢献度を誤差指標の大きさに応じて小さくする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム
【課題】外部環境に左右されることが少なく、特別な取り付け設定も必要としない、自車両が走行する車線を考慮した誘導案内が可能なナビゲーション装置、ナビゲーション方法及びナビゲーションプログラムを提供する
【解決手段】ナビゲーション装置1は、道路を走行している移動体の現在位置を算出する位置検出部14と、移動体が左折を開始したリンク上左折開始位置P2、及び当該位置での仮想道路幅W1を算出する左折判定部18と、算出されたリンク上左折開始位置P2、及び仮想道路幅W1を道路リンク情報に記憶する情報記憶部16と、仮想道路幅W1と現在位置P6から現在走行中の道路を表す道路リンクRL1までの距離である実測道路幅W2との差分値W3を用いて、移動体が走行している車線を判定する走行車線判定部19と、を備える。
(もっと読む)
移動体の測位装置
【課題】ピクセル画像に基づくマップマッチングを行う移動体の測位装置を提供する。
【解決手段】移動体の測位装置は、移動体の現在位置とその確からしさの情報をノンパラメトリックな分布として指示する位置情報群を保持する位置記憶装置と、離散時刻Tにおける当該移動体の移動距離と方位をあらわす移動ベクトルとその確からしさの情報を出力する移動ベクトル推定装置と、移動体が移動する範囲の周辺地図を移動体の移動分解能に応じた解像度の画像群として保持する画像データベースと、周辺地図に基づいて前記位置情報群と移動ベクトルからマップマッチング処理を行う画素交差判定装置とを備える。
(もっと読む)
低電力慣性航法処理
【課題】バッテリー電力パック等の可搬電力源で長期間作動することが意図されている航法用支援施設(例えば、パーソナル・ナビゲーション・システム)に対し、低い総電力消費で、慣性航法データを処理するための方法及びシステムを提供する。
【解決手段】本慣性航法システム100は、データバッファ108と、データバッファと通信する航法処理用ユニット106とを備える航法処理用アセンブリ102と、データバッファと通信する複数の航法用センサ104と、航法処理用ユニットと通信するシステムインターフェース110とを備えている。複数のセンサからのデータ測定値は、データバッファに累積される。航法処理用ユニットは周期的に作動化され、累積されたデータ測定値を処理する。航法処理用ユニットは、累積されたデータ測定値が処理されると非作動化して、総電力消費を削減する。
(もっと読む)
リアルタイムキネマティック(RTK)測位における距離依存性誤差の軽減
【課題】
全地球的航法衛星システム内の複数の衛星から受信される信号に基づいてコード測定値及び搬送波位相測定値の距離依存性大気誤差を軽減する。
【解決手段】
残差対流圏遅延及び複数の残差電離層遅延をカルマンフィルタ内の状態としてモデル化する(340)。カルマンフィルタの状態更新関数は少なくとも1つの基線距離依存因子を含み、ここで基線距離は基準受信機と移動受信機との間の距離である(340)。複数のアンビギュイティ値をカルマンフィルタ内の状態としてモデル化する。アンビギュイティ状態のためのカルマンフィルタの状態更新関数は動的ノイズ因子を含む(図3Bの360)。残差対流圏遅延(372)、複数の残差電離層遅延(374)及び/又は複数のアンビギュイティ値(376)に従って移動受信機の推定位置を更新する(370)。
(もっと読む)
監視応用のためのマップマッチング
【解決手段】
この発明の代表的な実施例にしたがって、目標物のための測定された位置とディジタルマップにおける情報との間のマップマッチング用の装置が示されている。これは、測定された位置に基づく、さらには、既定の誤差に基づくマップ上のマップ作成(cartography)エレメントの第1選択を実行するために使用されている計算ユニットを有する。さらに、この計算ユニットは、第1および第2補助(secondary)計算ユニットのための選択されたマップ作成エレメントを提供するように設計されている。さらに、補助計算ユニットからの値が、同一の測定のユニットにおいて変換される。
(もっと読む)
位置検出装置及び位置検出方法
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
地図データ修正装置、地図データ修正方法、及び地図データ修正プログラム道路形状修正装置および方法
【課題】地図データの表す道路形状と実際の道路形状との差の大きさに関わらず、より精度の高い地図データに修正することができる地図データ修正装置、地図データ修正方法、及び地図データ修正プログラムを提供する。
【解決手段】地図データを修正する地図データ修正装置であって、地図を表す地図データを記憶する地図データ記憶部と、車両の現在の位置を計測する測位部と、地図データ記憶部に記憶された地図データの表す地図上の車両の現在の位置を表すデータと測位部が計測した車両の現在の位置を表すデータとを比較して、地図データの修正が必要か否かを推定する地図データ修正推定部と、地図データ修正推定部が前記地図データの修正が必要であると推定した場合、測位部が計測した車両の現在の位置を表すデータに基づいて、地図データを修正する地図データ修正部とを備える。
(もっと読む)
地図データ修正装置、地図データ修正方法、及び地図データ修正プログラム
【課題】ナビゲーション装置の取付け作業の煩わしさを強いることなく、走行車線に関する地図データを修正できる地図データ修正装置を提供する。
【解決手段】車両が交差点を右左折する際に、車両の現在の進行方位を表すデータと車両の現在の位置に対応する地図データ記憶部から得られる地図上の位置における進行方位を表すデータとを比較して、地図上の交差点開始位置と交差点終了位置とを特定し、地図上の交差点開始位置と交差点終了位置との間を車両が実際に走行した走行軌跡の距離を算出する走行軌跡の距離を算出し、走行軌跡の距離を表すデータと地図データ記憶部から得られる地図上の交差点開始位置と交差点終了位置との距離を表すデータとを比較して、走行車線を推定し、推定した走行車線の表すデータに基づいて地図データを修正する。
(もっと読む)
101 - 120 / 189
[ Back to top ]