
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
121 - 140 / 189
自己位置標定装置、自己位置標定方法および自己位置標定プログラム
【課題】道路上の白線や、道路標識といった既存の道路インフラを利用して、自己位置標定装置の標定精度を向上させる。
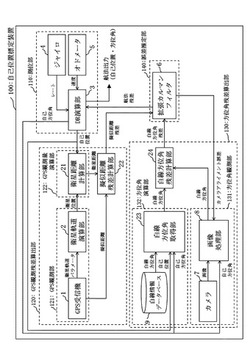
【解決手段】車両に搭載した自己位置標定装置100において、DR演算部3はデッドレコニングにより車両位置を算出する。擬似距離残差計算部22は擬似距離と衛星軌道パラメータに基づく衛星−車両間の距離とで擬似距離残差を算出する。カメラ7は車両前方の道路を撮像し、画像処理部8は画像に映る白線の方位角を算出し、白線方位角取得部23は白線情報データベース9から白線の方位角を取得し、白線方位角残差計算部24は画像処理部8が算出した白線の方位角と白線方位角取得部23が取得した白線の方位角とで方位角残差を算出する。拡張カルマンフィルタ6は擬似距離残差と方位角残差とを観測量として入力し、DR演算部3の測位結果の誤差を推定する。DR演算部3は拡張カルマンフィルタ6の推定誤差で測位結果を補正する。
(もっと読む)
センサ融合ナビゲーションのためのシステムおよび方法

【課題】精密なナビゲーションを実施できるナビゲーション・システムを提供する。
【解決手段】ナビゲーション・システムは、複数のナビゲーション・センサを備え、複数のナビゲーション・センサのそれぞれは、剛体の複数の状態(剛体状態)のうちの少なくとも1つについてのデータを提供するように構成され、それによって複数の剛体状態のそれぞれについてのデータが複数のナビゲーション・センサのうちの1または複数のものによって提供されるようにし、複数のナビゲーションセンサのうちの1つがステレオ・ビジョン・センサであり、また、ナビゲーション・システムは、複数のナビゲーション・センサに結合された処理装置を備え、処理装置は、複数の剛体状態のそれぞれについてのデータを統合して、複数の剛体状態のそれぞれについての組合せ状態推定を得るように構成される。
(もっと読む)
飛しょう体及び飛しょう体に搭載される慣性装置の調定方法
【課題】 飛しょう体が備える慣性装置の調定を短時間で行うこと可能にする。
【解決手段】 飛しょう体の胴体外周に複数設けられた赤外線センサからの出力情報に基づき前記飛しょう体のロール角を求めるロール角推定手段と、前記飛しょう体の位置座標とピッチ角とヨー角とを算出するGPSジャイロとを有する姿勢角初期推定手段と、前記姿勢角初期推定手段から入力した前記ロール角に基づき、前記GPSジャイロがGPS衛星からのGPS信号を受信可能な姿勢に制御する操舵装置制御手段と、前記飛しょう体に搭載した慣性装置から入力した慣性情報と、前記姿勢角初期推定部から入力した前記飛しょう体の位置座標とロール角とピッチ角とヨー角とに基づき、前記慣性装置を調定して前記飛しょう体の位置と姿勢角を算出する航法装置とを備えるようにした。
(もっと読む)
GPS複合航法装置
【課題】GPS受信機を含む構成のGPS複合航法装置において、移動体の静止時における移動体の推定位置、推定速度、推定方位の変化を解消すると共に、静止から移動時における応答特性の良いGPS複合航法装置を提供することを目的とする。
【解決手段】移動体の静止を判定する静止判定部を設け、該静止判定部で静止状態と判定されたとき、カルマン・フィルタの観測更新に用いる観測モデルを変更すると共に、更新による誤差共分散行列の変化分を補正することを特徴とする。
(もっと読む)
移動体用測位装置
【課題】早期に擬似距離のばらつきを収束させること。
【解決手段】本発明による移動体用測位装置1は、慣性航法測位部60と、衛星と移動体の間の擬似距離を計測するGPS受信機20と、擬似距離推測部80と、衛星軌道情報に係る衛星の位置の分散と、慣性航法測位部60により導出された前記移動体の位置の分散と、GPS受信機20の時計誤差の分散とに基づいて、擬似距離推測部80により推測された擬似距離ρ推測の分散ρ推測を算出する分散算出部30と、を備える。好ましくは、GPS受信機20により計測された擬似距離ρと、擬似距離推測部80により推測された擬似距離ρ推測とを結合して、結合擬似距離ρCOMを算出する擬似距離結合部40と、この結合擬似距離ρCOMを用いて移動体位置を測位する測位演算部50とを更に備え、擬似距離結合部40は、分散算出部30により算出された分散ρ推測を用いて、結合擬似距離ρCOMを算出する。
(もっと読む)
GPS複合航法装置
【課題】GPS受信機を含む構成のGPS複合航法装置において、GPS擬似距離或観測量及びドップラー周波数観測量との差に基づいて、GPS受信機出力の異常を検知するとき、GPS受信機出力の異常を正確に判定すると共に、GPS擬似距離或観測量及びドップラー周波数観測量の推定誤差に起因する異常判定時の異常継続を回避するGPS複合航法装置を提供することを目的とする。
【解決手段】GPS受信機出力の異常を検知したとき、異常期間を計数し、該計数値が予め決められた閾値以下ではGPS受信機出力を異常として扱い、前記閾値を超えた以後はGPS受信機出力を正常として扱うことによって、GPS受信機出力の異常を正確に判定することを特徴とする。
(もっと読む)
現在地測位装置及び方法
【課題】ナビセンサ14(GPSセンサ)による現在地測位不調期間では、Gセンサ15の出力に基づき現在地を測位するポータブルナビゲーション装置10において、現在地の精度を改善する。
【解決手段】ナビセンサ14の検出信号をカルマンフィルタにより処理して、該検出信号中の白色性ノイズを除去して、最適推定加速度を抽出する。最適推定加速度に基づき、移動量を算出する。ナビセンサ14による測位正常期間の所定の現在地を始点に設定し、該始点からの移動量に基づき現在地を測位する。
(もっと読む)
相関位置決定
【課題】選択区域内において相関を使用してナビゲートするための方法および装置。
【解決手段】方法は、選択区域全体にわたって最初に横断する間に、対象物までの距離および対象物に対する関連する角度を再構築するために必要なデータを、統計的精度情報と共に記憶するステップ506、選択区域全体にわたって続けて横断する間に、その時現在の対象物までの距離および対象物に対する関連する角度を測定するステップ604、その時現在の対象物までの距離および対象物に対する関連する角度を、記憶しているデータから再構築された対象物までの距離および対象物に対する関連する角度に相関付けるステップ608、選択区域内におけるその時現在の位置推定値および向首方位推定値の少なくともひとつを、少なくとも相関結果の少なくとも一部に基づいて決定するステップと、その時現在の位置推定値および向首方位推定値の少なくともひとつを、ナビゲーションに使用するステップ920を含む。
(もっと読む)
車両位置検出システム、車載装置及び車両位置検出方法
【課題】車両の位置を精度良く検出することができる車両位置検出システム、車載装置及び車両位置検出方法を提供する。
【解決手段】車載装置30は、光ビーコン10との通信により、路上装置21、22、23それぞれの交信位置、その誤差範囲、停止線の位置などを受信し、受信した情報を記憶するとともに、走行距離の計測を開始し、車両位置の推定を所定時間経過の都度繰り返し行う。車載装置30は、路上装置21、22、23との交信により、交信地点の位置及びその誤差範囲を取得し、交信地点の位置の誤差範囲及び走行距離の誤差範囲に基づいて、車両の位置の推定誤差が最小になるように、交信時点の直前に推定した車両位置の推定値を更新する。
(もっと読む)
2次元上を動く物体の経路の検出装置および検出方法
本発明は、平面または2次元表面において、または平面または2次元表面に沿って動く生物または物体の反復動作による経路の2次元での再構築方法であって、下記ステップを含む。
−前記生物または物体に結合されまたは配置された2軸または3軸の磁気計の少なくとも2軸における地磁気フィールドの少なくとも2つの変化投影成分の計測と、
−前記磁気計の少なくとも一つの軸に沿った少なくとも一つの前記変化成分の計測に対応する信号の周期または周波数の計測と、
−前記磁気計の少なくとも二つの軸に沿った少なくとも二つのフィールドの計測からの動作の方位、または方向の計測と、
−一方では周期または周波数の、他方では方位または方向の計測からの前記経路の再構築。
(もっと読む)
センサ誤差推定装置及び観測装置及び方法及びプログラム
【課題】計測誤差を推定し、推定した計測誤差で計測量を補正する観測装置において、誤差推定の進捗度を正しく見積もる。
【解決手段】誤差推定部130は、距離及び距離変化率観測部112が観測した擬似距離などに基づいて、車速パルス発生器121・ジャイロスコープ122などが計測した速度・角速度などの計測誤差を推定し、推定した計測誤差の推定誤差を算出する。進捗度算出部151は、誤差推定部130が算出した推定誤差に基づいて、誤差推定の進捗度を算出する。
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
車両制御装置
【課題】運転者により合致した車両制御を行なうことが可能な車両制御装置を提供する。
【解決手段】制御対象地点及び前記制御対象地点の周辺を走行したときの運転状態、運転者の状態及び路面状態を含む特定走行関連情報を検出する手段(S109)と、前記特定走行関連情報が検出された位置を検出する手段(S109)と、前記特定走行関連情報を検出された位置情報と共に仮保存する手段(S110)と、車両のナビゲーションシステム装置の地図情報の補正が行われた際に(S111)前記補正された地図情報に基づいて、前記仮保存された特定走行関連情報が検出された位置の情報を修正して記憶する手段(S112)と、前記特定走行関連情報と、前記記憶された特定走行関連情報が検出された位置の情報に基づいて、車両を制御する手段(S105)とを備えている。
(もっと読む)
位置検知方法
【課題】 絶対位置検知装置による移動軌跡に相対位置検知装置による移動軌跡をフィッティングさせる際に、少ない種類のパラメータで相対位置検知装置の位置を高精度に決定し維持する位置検知方法を提供する。
【解決手段】 相対位置検知装置の出力値と絶対位置検知装置の出力値とを併用して位置を検知する位置検知方法において、絶対位置検知装置の移動軌跡に相対位置検知装置で求めた移動軌跡をフィッティングさせるための回転角および移動量を求め、相対的位置検知装置の最新位置を上記回転角および移動量で補正し、補正された位置から新たな移動軌跡の検知を開始し、絶対位置検知装置の利用可能な新たな位置情報が得られるまでは、相対位置検知装置の出力値を上記回転角および移動量で補正し続ける。絶対位置検知装置の高精度区間における移動軌跡を用いて、相対位置検知装置の位置を補正できる。
(もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
ナビゲーション装置及びナビゲーション装置の制御方法
【課題】人間が携帯しながら携帯用ナビゲーション装置としても、また車内に持ち込んで車載用ナビゲーション装置としても、両方共に十分有効に利用することができる操作性が良好なナビゲーション装置及びナビゲーション装置の制御方法を提供する。
【解決手段】移動体の加速度を検出する第1検出手段14と、移動体の進行方向を検出する第2検出手段16と、移動体の三次元位置を検出する第3検出手段18と、第1、第2及び第3検出手段14,16,18の出力から移動体の位置を推定する位置算出手段20と、位置算出手段20で推定された移動体の位置と地図とを照合して移動体の現在位置を求める照合手段と、を有し、位置算出手段20は、モード選択手段を含み、モード選択手段は、移動体の移動方法から、移動体の適切な位置推定方法を選択する。
(もっと読む)
移動体位置測位装置
【課題】複数の測位手段を用いて効率的に且つ精度良く移動体位置を測位すること。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号の観測データに基づいて瞬時測位方法により移動体の位置を測位する第1測位手段と、過去の移動体の位置の測位結果と、移動体の速度情報とを用いて、移動体の位置を測位する第2測位手段と、過去の前記第1又は第2測位手段の測位結果から得られる変数解を用いて、移動体の位置を測位する第3測位手段と、前記各測位手段のうち測位処理を実行する測位手段を選択する制御手段60とを備え、前記制御手段は、選択した測位手段の測位結果の信頼性が所定基準値より低い場合に、別の測位手段を選択して測位処理を実行させることを特徴とする。
(もっと読む)
移動体位置測位装置
【課題】停車判定を適切に行い、停車状態に起因した移動体位置情報の変動を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星航法と慣性航法とを併用して移動体位置情報を導出する移動体位置情報導出手段と、加速度センサ及び/又は角速度センサの出力値に基づいて移動体が停止しているか否かを判定する第1移動体停止判定手段と、車速を表すことができる車載センサの出力値等に基づいて移動体が停止しているか否かを判定する第2移動体停止判定手段と、前記第1移動体停止判定手段により移動体が停止していると判定されたとき、そのときの前記移動体位置情報を記憶する記憶手段と、前記第1移動体停止判定手段により移動体が停止していると判定された後に前記第2移動体停止判定手段により移動体が停止していると判定された場合に、前記記憶手段に記憶された移動体位置情報を、現在の移動体位置情報として出力する。
(もっと読む)
移動体位置検出装置
【課題】走行経路の地図データが十分に高分解能であることを利用して、移動体)の走行経路)に対する位置関係を高分解能で検出できる移動体位置検出装置の実現。
【解決手段】移動体1に設けられ、移動経路10の端11,12を検出する移動端検出部2と、移動体の移動速度を検出する速度検出部3と、移動体の移動方向を検出する方位検出部4と、地図データを記憶した地図データ記憶部7と、検出した移動経路の端、移動速度及び移動方向、及び地図データから、移動体1の移動経路に対する位置関係を算出する処理部5と、を備える。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
121 - 140 / 189
[ Back to top ]