
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
161 - 180 / 189
測位装置及び測位方法

【課題】電波航法により絶対位置、絶対速度を得ることができない場合、或いは、電波航法による測位精度が低い場合でも、自律航法における測定誤差を的確に推測する。
【解決手段】電波を受信している衛星の数や配置等に基づいて、電波航法で得られる絶対測位情報が高信頼度であるかを判定し(ステップS2)、高信頼度であるときには、電波航法による絶対測位情報を利用して、自律航法による測位結果の測定誤差を推定する(ステップS4)。電波航法による絶対測位情報が高信頼度でない場合は、捕捉衛星の中から受信パワーや仰角がしきい値よりも大きい高信頼度衛星を選択し(ステップS5)、この高信頼度衛星との間の擬似距離及びドップラ周波数を算出しこれを利用して、自律航法による測位結果の測定誤差を推定する(ステップS6)。そして推定した測定誤差を用いて自律航法による測位結果を補正し、測位装置10本体の測定位置を得る。
(もっと読む)
ナビゲーション・システム内での反復拡張カルマン・フィルタを実施する方法及び装置

【課題】慣性測定装置、位置決め装置及び処理装置(70)を備える車両用のナビゲーション・システム(10)を提供する。
【解決手段】慣性測定装置は、車両の運転に関する第1のセットのデータを提供するように構成され、位置決め装置は、車両の運転に関する第2のセットのデータを提供するように構成れる。処理装置は、慣性測定装置及び位置決め装置が提供するデータのセットを受信するように構成され、処理装置は誤差処理装置を備える。誤差処理装置は、処理装置が受信したデータのセットに関係する時間更新誤差状態及び測定更新誤差状態を用いてプログラムされるものであり、第1の基準に基づいて時間更新誤差状態及び測定更新誤差状態の双方を繰り返し、第2の基準に基づいて測定更新誤差状態のみを繰り返すように構成される。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】磁気方位センサの誤差や荒天時の風などの外乱に左右されることなく、より安定して姿勢/方位の初期データの精度を向上させることができる慣性航法装置を実現する。
【解決手段】移動体搭乗者のヘルメットに取付けられたジャイロセンサと加速度計の出力を利用して当該搭乗者頭部の位置や姿勢を求める慣性航法装置において、ジャイロセンサおよび加速度計の出力を補正するセンサ誤差補正計算部と、センサ誤差補正計算部により補正されたジャイロセンサおよび加速度計の出力を利用して頭部の位置や姿勢を計算するとともに、頭部の位置や姿勢の計算結果を補正する航法・姿勢方位計算部と、頭部が静止状態にあるときに航法・姿勢方位計算部より出力される速度データを速度誤差として利用し、センサ誤差補正計算部で使用するセンサ誤差データを校正するとともに、姿勢/位置誤差データを校正する誤差推定計算部とを有することを特徴とする。
(もっと読む)
車載器
【課題】測位誤差を良好に除去して精度の高いGPS測位結果を安定的に取得する。
【解決手段】所定の基準値に対する車両の高度方向の変位量を推定する高度変位推定手段と、推定される変位量の絶対値が所定の閾値よりも大きいか否かを判定する変位量判定手段とを備え、該変位量が該閾値よりも大きいと判定され且つGPSにより少なくとも高度の測位が成されたとき、カルマンフィルタの機能をリセットする車載器を提供する。
(もっと読む)
測位システム、測位方法及びカーナビゲーションシステム
【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
(もっと読む)
小型姿勢センサ
【課題】カルマンゲインやクォータニオンの算出を容易にして現実的な姿勢センサの実装を可能にし、さらに、小型化及び実時間処理を可能とする小型姿勢センサを提供することを目的とする。
【解決手段】移動物体の独立な3軸上の角速度を計測する角速度センサ101、移動物体の独立な3軸上の加速度を計測する加速度センサ102、移動物体の独立な3軸上の地磁気を計測する地磁気センサ103、角速度センサ101、加速度センサ102、及び地磁気センサ103の計測値を基にクォータニオンの推定値を算出する演算処理部104を備え、クォータニオン推定値をクォータニオンにより表現する三次元姿勢角として出力することを特徴とする小型姿勢センサを提供する。
(もっと読む)
たて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法
【課題】本発明は、地球の自転角速度・重力を利用し、前記ドリルの旋回により生じる方位角誤差を除去し、抗掘削の方位精度を向上させることを目的とする。
【解決手段】本発明によるたて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法は、方位検出部(20)が検出する地球の自転角速度・重力を利用し、ドリル(2)の旋回により生じる方位角誤差を除去する構成と方法である。
(もっと読む)
測位端末
【課題】測位端末において、測位結果の表示にかかる時間や通信コストを削減し、異なる測位方式であっても単一の端末で測位可能とする。
【解決手段】測位端末1は、自律測位部11、無線測位部12、推測航法部13、位置補正部14、測位演算部15、位置情報表示部16および測位ソフトウェア記憶部18を備える。自律測位部11が測位端末1の所持者の歩行動作に応じて慣性データを出力し、推測航法部13がその慣性データから位置情報を推定する。一方、無線測位部12および測位演算部15は、測位ソフトウェア記憶部18からロードされた測位ソフトウェアをCPUが実行することによって動作し、無線信号の周波数、変調方式、測位方式に応じて無線信号の受信、復調、測位演算などを行う。位置補正部14は、推測航法部13および測位演算部15から入力した位置などから位置情報を補正する。そして、位置情報表示部16が、位置情報を表示する。
(もっと読む)
移動体用位置推定装置
【課題】道路形状や周辺環境に影響されずに高精度に移動体の位置を推定する移動体用位置推定装置を提供すること。
【解決手段】移動体に搭載され、移動体の位置を推定する移動体用位置推定装置に、移動体に搭載された慣性航法センサ群(加速度センサ、ヨーレートセンサなど)の出力に基づいて移動体の位置を推定する第一の推定手段と、少なくともノード情報を含む地図情報を記憶した記憶手段と、ノード情報から予測された移動体の予想移動軌跡に基づいて移動体の位置を推定する第二の推定手段と、第一の推定手段により推定された移動体位置と第二の推定手段により推定された移動体位置とを合成処理して移動体の最終推定位置を決定する合成手段とを備える。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法および装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法およびカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
状態推定装置及びそのプログラム、並びに、統合状態推定システム及び統合状態推定装置
【課題】 複数の状態推定動作を並列動作させることで推定処理の高速性、信頼性、汎用性を高めた統合状態推定システムを提供する。
【解決手段】 統合状態推定システムSは、通信路(ネットワークN)を介して、複数の状態推定装置10を備え、各状態推定装置10が、それぞれ推定した観測対象の状態(状態量X)を送受信し合うことで状態量Xを統合し、少なくとも一つの状態推定装置10が、観測対象の状態を示す推定量Eを出力することを特徴とする。
(もっと読む)
航法装置における連続的、不連続的慣性計器測定値の積分装置と方法
二種の慣性航法機器(12、14)の出力が、連続的に航法を提供する間、精度改善のため組み合わされる。本発明は光原子機器出力の性質を利用して、光原子機器(12)の「休止時間」中の従来型慣性センサーのドリフトの影響を和らげる一方、加速度と角速度情報の直接抽出を強いることなく高められた航行能力を提供する。 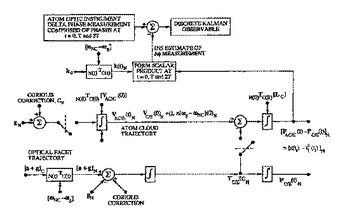 (もっと読む)
(もっと読む)
磁気センサとレートセンサを用いた真方位角検出方法
【課題】本発明は、外乱による誤差及び観測雑音等の影響を除去した高精度の方位角推定値を得ることを目的とする。
【解決手段】本発明による磁気センサとレートセンサを用いた真方位角検出方法は、磁気センサ(1)からの方位角信号(2)とレートセンサ(4)の方位軸回りの角速度信号(5)をカルマンフィルタによる方位角推定部(3)に入力して演算処理することにより方位角推定値(6)を得る方法である。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 測位位置のバラツキのある環境下における測位精度を向上させる。
【解決手段】複数の測位位置を用いた重み付き回帰推定に基づいて現在位置を推定する重み付き回帰推定手段7および複数の測位結果に基づいて重み付き回帰推定における重みを算出する重み算出手段6をフィルタリング処理手段5に設け、複数の測位結果に基づいて重み付き回帰推定における重みを更新しながら、複数の測位位置を用いた重み付き回帰推定に基づいて現在位置を算出する。
(もっと読む)
車両間通信システム
【課題】 自車両が検出できなかった移動体の存在を運転者に知らせることが可能な車両間通信システムを提供する。
【解決手段】 車両同士が通信を行う車両間通信システムであって、車両ごとに設けられた、当該車両の周囲を撮像するカメラ11,11と、カメラ11,11によって撮像された画像から移動体を検出する対象物検出部32と、車両ごとに設けられた、音声を発するスピーカ21と、車両ごとに設けられた、当該車両のスピーカに発音させる音声に関する音声データを生成する音声データ生成部41dと、車両ごとに設けられた、データの送受信を行う送受信機19と、を備え、一の車両の音声データ生成部41dは、他の車両の対象物検出部32によって検出された移動体の存在を知らせる音声データを生成し、スピーカ21に出力する。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 状況に応じて精度の高い測位結果を取得する。
【解決手段】 測位サーバ100において、通信部110は移動体の擬似距離と擬似距離補正値とを受信する。擬似距離補正測位部120は擬似距離補正値で擬似距離を補正し、補正した擬似距離を用いて測位する。また、通信部110は基準局の擬似距離と移動体の単独測位の結果とを受信する。単独測位部130は基準局の擬似距離を用いて基準局についての単独測位を行う。位置補正データ生成部140は基準局の単独測位結果と正確な座標値との差分から位置補正値を算出する。位置補正データスムージング処理部150はこれまでの位置補正値を平滑化した位置補正値を算出する。位置補正測位部160は位置補正値で移動体の単独測位の結果を補正して測位する。そして、測位結果選択部170は擬似距離補正測位部120の測位結果と位置補正測位部160の測位結果とで精度の高い方の測位結果を選択し出力する。
(もっと読む)
衛星信号から導かれるドリフト推定を使用したGPS受信機の調整可能クロック
ナビゲーションシステムは、少なくとも1つの全地球測位衛星信号を受信して、全地球測位衛星情報を出力するための全地球測位衛星受信機を備える。ナビゲーションシステムはさらに、ソフトウェアを実行するために、全地球測位衛星受信機に通信できるように結合された、プログラム可能プロセッサを備える。ナビゲーションシステムはさらに、プロセッサクロック情報を出力するために、プログラム可能プロセッサに通信できるように結合されたクロックを備える。ソフトウェアは、GPS情報を使用してプロセッサクロック情報内のドリフトの量を推定し、調整済みプロセッサクロック情報を生成するために、ドリフトの量に対してプロセッサクロック情報を調整する。ソフトウェアは、少なくとも全地球測位衛星情報と調整済みプロセッサクロック情報の関数としてナビゲーション解を生成する。  (もっと読む)
(もっと読む)
ナビゲーション・システム
ナビゲーション・システムは現在位置を推測しない第1動作状態と現在位置を指定する第2動作状態を有する第1ナビゲーション・モジュールを含む。第1ナビゲーション・モジュールの第1動作状態に応答して第2ナビゲーション・モジュールが推測航法を行う。 (もっと読む)
ナビゲーションシステム
【課題】
交通情報配信サーバと端末装置を有するナビゲーションシステムにおいて、より効率よく交通情報のダウンロードができる技術を提供する。
【課題を解決するための手段】
交通情報配信サーバは、端末装置での処理に用いられる交通情報になるべく絞って、端末装置にダウンロードする。例えば、交通情報配信サーバは、経路を構成するリンクまたはリンク周辺(例えば、そのリンクを含むメッシュ領域)に関し、かつ当該リンクの予想走行時間帯に関する交通情報を取得する交通情報取得手段と、取得した交通情報を端末装置にダウンロードする送信手段とを有する。
ダウンロード対象を絞る手段は、サーバ側が持っていてもよいし、端末装置側が持っていても良い。
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
161 - 180 / 189
[ Back to top ]