
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
61 - 80 / 189
後処理を用いるリアルタイム・データ(Real−TimeDataWithPost−Processing)
本明細書で開示される主題は、航法解を求める及び/又は予測することに関係する。 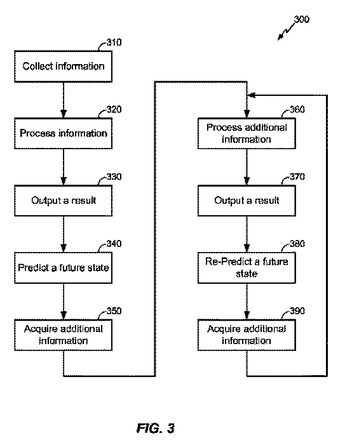 (もっと読む)
(もっと読む)
コンピュータ支援による船舶操縦方法
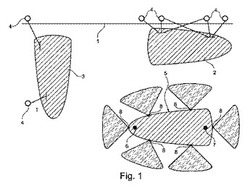
【課題】信頼できる船舶操縦方法を提供すること。
【解決手段】接岸時の操船において、船舶の位置と動きが、移動または静止している障害物または障害輪郭とともに、自動的に冗長手段によって把握され、コンピュータによって画像表示が制御されることにより、前記画像表示上において前記障害物または前記障害輪郭に対する前記船舶の実際の位置が、実行されているまたは推奨されている操縦操作とともに表示されることとする。
(もっと読む)
慣性航法装置、飛翔体及び航法データ算出方法

【課題】飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供する。
【解決手段】本発明の慣性航法装置Aは、慣性計測器11の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機12と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部14と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部13と、を有するという構成を採用する。
(もっと読む)
移動体用測位装置
【課題】より正確な移動体の速度ベクトルを出力することが可能な移動体用測位装置を提供すること。
【解決手段】衛星電波を用いて移動体の位置を算出する位置演算手段と、衛星電波又は慣性航法により前記移動体の速度ベクトルを算出する速度演算手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、前記速度ベクトル算出手段により算出された速度ベクトルを、前記リンクのうち移動体が存すると推定されるリンクに投影した投影速度ベクトルを出力する投影手段と、前記投影手段により出力される投影速度ベクトルの採用の可否を判定する投影可否判定手段と、を備え、該投影可否判定手段により前記投影速度ベクトルを採用すべきと判定された場合に、前記投影速度ベクトルを前記移動体の速度ベクトルとして出力することを特徴とする、移動体用測位装置。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルター処理を用いた位置算出において算出位置の直進性を向上させること。
【解決手段】位置算出装置を具備した携帯型電話機において、カルマンフィルター処理で用いる位置変化の許容度を表す位置変化許容パラメーターの値を、検出された移動方向に基づいて設定する。そして、設定した位置変化許容パラメーターの値を用いてカルマンフィルター処理を実行して位置を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性とセンサー部の消費電力とのバランスを考慮した適切な位置算出を実現すること。
【解決手段】移動体に保持或いは搭載される携帯型電話機1において、ホストCPU40は、移動体の移動状態を検出するセンサー部90を所定の間欠動作周期で間欠的に動作させるが、この間欠動作周期をGPS衛星信号の受信状況に基づいて可変に制御する。そして、間欠動作周期で動作したセンサー部90の検出結果を用いて所定の慣性航法演算を行って慣性航法演算位置を算出し、GPS算出位置と慣性航法演算位置とを合成して出力位置を決定する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】携帯型電話機1を保持又は搭載した移動体の移動可能性、不定及び停止可能性それぞれについて、センサ部70の加速度センサ71の検出値適合範囲を設定するとともに、移動可能性の検出値適合範囲を最も広く設定することで、移動体の停止判定用のメンバシップ関数を設定する。そして、メンバシップ関数を用いたファジィ推定演算により移動体が停止状態にあるか否かを判定し、カルマンフィルタを用いた位置算出演算を行う際の誤差パラメータである観測誤差共分散行列「R」及びシステムノイズ行列「Q」の値を、停止状態にあると判定したか否かに応じて変更する。そして、最小二乗法を用いた位置算出処理により算出した移動体の位置を、カルマンフィルタを用いた位置算出処理により補正することで、出力位置を決定する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】GPS衛星からのGPS衛星信号に基づいて、最小二乗法を用いた位置算出処理を行って移動体の位置を算出する。そして、加速度センサ71、ジャイロセンサ73及び方位センサ75を含むセンサ部70の検出結果に基づいて移動体の移動状態を判定し、判定した移動状態に応じて、カルマンフィルタを用いた位置算出処理で用いられる誤差パラメータ(観測誤差共分散行列「R」)及び時変パラメータ(システムノイズ行列「Q」)の値を変更する。そして、算出した位置を、カルマンフィルタ位置算出処理を行って補正する。
(もっと読む)
航法装置及び推定方法
【課題】航法装置の推定の精度を劣化させることなく、計算量を少なくする。
【解決手段】姿勢角外挿計算部122は、角速度センサ111が計測した移動体座標系における移動体800の角速度ωbに基づいて、慣性座標系における移動体800の姿勢角qnを計算する。速度増分計算部126は、加速度センサ112が計測した移動体座標系における移動体800に加わる加速度abと姿勢角qnとに基づいて、慣性座標系における移動体800の速度の増分Δvnを計算する。速度外挿計算部127は、速度の増分Δvnに基づいて、慣性座標系における移動体800の速度vnを計算する。速度減算部130は、速度vnと、GPS受信機113が計測した慣性座標系における移動体800の速度vgとの差dvを計算する。第一推定部140は、姿勢角qnと、速度の増分Δvnと、速度の差dvとに基づいて、角速度の誤差bgと、姿勢角の誤差εとを推定する。
(もっと読む)
自律運転乗物用の制御及びシステム
ナビゲーション及び制御システムは、乗物の位置及び進行方向を示すポジション信号を生成するように構成される1つ以上のポジションセンサを含む。このシステムは、入力を有し、乗物の動作を制御する出力を生成する1つ以上の動作制御機構を含み、動作制御機構から離れた内蔵式自律型制御器を含む。自律型制御器は、ポジションセンサからポジション信号を受信し、乗物の更新された移動経路を定める動作制御信号を生成するように構成されるプロセッサと、ポジションセンサ、動作制御機構、及びプロセッサの間で通信を行うプログラマブルインタフェースとを含む。プログラマブルインタフェースは、ポジションセンサからのプロセッサへの入力を正規化し、動作制御機構への入力として加えられる適合する動作制御信号を生成するように構成され、それによって内蔵式自律型制御器は、様々な異なるセンサ及び異なる動作制御機構と共に動作するように構成可能である。  (もっと読む)
(もっと読む)
移動体位置推定システム、移動体位置推定方法、及び移動体位置推定プログラム
【課題】本発明は、移動体の位置情報を検出する際に位置検出遅れが生じても移動体に対して位置情報を高精度に取得可能な移動体位置推定装置を提供する。
【解決手段】移動体位置推定装置1は、移動体が備える位置検出手段からの更新位置信号と移動体が備える加速度などの物理量検出手段からの物理量検出信号に基づき移動体の位置を予測推定した推定信号を出力する移動体位置推定手段(位置推定器18)、位置検出手段の位置検出遅れを補正するため更新位置信号と物理量検出信号の検出時刻に関する対応を図るように移動体位置推定手段の入出力動作、処理動作を制御する補正制御手段10を含む。
(もっと読む)
車両姿勢角推定装置及びセンサドリフト推定装置
【課題】ドリフト誤差による影響を軽減して、精度よく姿勢角を推定することができるようにする。
【解決手段】前後車体速度を推定する前後速度推定手段12と、横車体速度を推定する横速度推定手段10と、ピッチ角速度を推定するピッチ角速度推定手段24と、ロール角速度センサ20及び上下加速度センサ14からのセンサ信号について、初期不感帯を設定するように補正する初期不感帯補正手段23と、各センサ信号、補正されたロール角速度センサ20及び上下加速度センサ14からのセンサ信号、前後車体速度の推定値、並びにピッチ角速度の推定値に基づいて、ロール角及びピッチ角を推定する姿勢角オブザーバ26と、を備えている。ピッチ角速度推定手段24は、前後車体速度の推定値、横車体速度の推定値、補正されたロール角速度及び上下加速度の各検出値、並びに推定されたロール角及びピッチ角の前回推定値に基づいて、ピッチ角速度を推定する。
(もっと読む)
ナビゲーションシステムの位置検出装置および位置検出方法
【目的】センサー数が少ないシステムであっても、位置精度や方位精度を向上できるようにする「ナビゲーションシステムの位置検出装置および位置検出方法」を提供することである。
【構成】車速センサーと加速度センサーと角速度センサーとを含むセンサー部、これらセンサーから出力される信号を用いて所定の周期で車両の現在位置、車両速度、車体の姿勢角を含む状態量を計算する自律航法計算部を備え、車両の位置を検出するナビゲーションシステムの位置検出装置である。自律航法計算部は、車速センサーから出力される信号を用いて前回の状態量計算時刻から今回の状態量計算時刻までに移動した移動量を計算する移動量算出部、車体の姿勢変化量を計算する変化量検出部、姿勢変化量を用いて移動量を車体の前後方向、車体の左右方向、車体の上下方向の方向成分に分解する移動量分解部、各方向成分を用いて今回の状態量計算時刻における車両の位置を計算する状態量計算部を備えている。
(もっと読む)
走行状態推定システム
【課題】自律航法システムとGPSの各方式間の信号の遅延時間を高精度に補償して最終的に決定される測位データの精度を向上させること。
【解決手段】GPS信号に基づき第一のサンプリング周期で測位データを演算して推定手段に出力するGPS測位演算手段と、第一のサンプリング周期より短い第二のサンプリング周期で観測データを出力する自律航法用センサと、第一のサンプリング周期内に自律航法用センサから出力された観測データの組を所定の一次関数に近似する近似式演算手段と有し、該近似式演算手段が、測位データと略同期したタイミングにおける一次関数の近似式の値を切片の値とし、該切片の値を該近似式の傾きの値とともに自律航法データとして推定手段に出力するように構成された走行状態推定システムを提供する。
(もっと読む)
移動体用測位装置
【課題】本発明は、移動体のリアルタイムの位置を、高精度で測位する移動体用測位装置を提供することを目的とする。
【解決手段】現在時刻における移動体の位置を測位し、所定の出力周期で出力する移動体用測位装置100であって、
前記現在時刻が、GPS演算データ更新時には、GPS演算データ、慣性航法測位手段30、速度検出手段40及び誤差補正手段50を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、移動体モデル演算手段60が前記現在時刻までの移動体モデルを演算して前記移動体の位置を測位し、
前記現在時刻が、前記GPS演算データ更新時と異なったときには、前記慣性航法測位手段、前記速度検出手段及び前記誤差補正手段を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、前記移動体モデル演算手段が前記現在時刻までの移動体モデルを演算し、前記移動体を測位することを特徴とする。
(もっと読む)
全地球測位システム及び推測航法(GPS&DR)一体型ナビゲーションシステム
【課題】全地球測位システム及び推測航法(GPS&DR)一体型ナビゲーションシステムが提供される。
【解決手段】該システムは、移動体に結合され該移動体のGPSナビゲーション情報を定期的に生成するためのGPS受信機と、移動体に結合され移動体のDRナビゲーション情報を定期的に算出するためのDRシステムと、GPS受信機及びDRシステムに結合され移動体のナビゲーション情報を定期的に算出するためのフィルタと、を含む。フィルタは、GPSナビゲーション情報の加重値及びDRナビゲーション情報の加重値に従って、GPSナビゲーション情報及びDRナビゲーション情報を統合することによって観測情報を取得し、また、観測情報を複数の先行サイクルからの先行ナビゲーション情報と統合することによって、現在のナビゲーション情報を算出する。
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
水中移動体の位置検知装置
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
転回検出装置、プログラム、および車両方位検出装置
【課題】車両の方位の検出精度を極力悪化させることなく車両が駐車中に転回したことを速やかに検出できるようにする。
【解決手段】ナビゲーション装置においては、当該車両の始動時に起動する測位処理にて、当該車両の始動前にRAMに記録された検出結果に基づく車両の方位と、当該車両の始動後に地磁気センサ22によって検出された車両の方位と差分を検出する(S130)。そして、この差分が予め設定された方位閾値よりも大きければ(S130:YES)、当該車両の駐車中に当該車両が転回したと判定する。よって、当該車両が駐車中に転回したか否かを速やかに判定することができる。また、車両の走行中においては、地磁気を利用することなく車両の方位を検出する構成を採用することができる。
(もっと読む)
61 - 80 / 189
[ Back to top ]