
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
141 - 160 / 189
慣性航法を使用した実時間位置測量のための方法及び装置

【課題】慣性航法システムを使用して2つの地点の相対位置を決定する方法を提供する。
【解決手段】本方法は、INS(10)が第1の位置なあるときの位置誤差状態及び位置解を推定するステップと、INSが第2の位置にあるときの位置誤差状態及び位置解を推定するステップと、INSを第1の位置に戻すステップとを含む。第1及び第2の位置誤差状態の推定値は、INSを第2の位置から第1の位置へ戻す移行の間に生成された相関関係に基づいて調整される。
(もっと読む)
完全性監視付きハイブリッドINS/GNSSシステムおよび完全性監視方法

本発明は、慣性装置と衛星測位受信機とのハイブリッド化システムから得られる位置および速度情報の完全性の監視に関する。本発明は、より詳細には、閉ループにおいてハイブリッド化したINS/GNSSシステム(「慣性航法システム」および「全地球的航法衛星システム」を表す)として当業者に知られる航法装置に関する。 (もっと読む)
ナビゲーション・システムおよびナビゲーション方法
【目的】高精度を達成するためにGPS測定結果に加えて車両走行状態を利用する「ナビゲーション・システムおよびナビゲーション方法」を提供する。
【構成】MEMS(超小型電子・機械式システム、Micro Electro Mechanical System)と呼ばれる安価で低精度の慣性センサーを使用する慣性航法システム(INS)とGPSを複合したナビゲーション・システムにおいて、(1)慣性センサーから得られる加速度と角速度を用いて予め複数の車両走行状態を定義し、(2)INSに搭載された慣性センサーから車両の各座標軸における加速度と角速度を受信し、(3)該加速度と角速度を評価することで車両の現在の走行状態を判別し、(4)判別された車両走行状態に応じた値を求め、該値を測定値としてINSとGPSを複合するカルマン・フィルタに送り、(5)車両走行状態を考慮してカルマン・フィルタ処理を行って車両の位置、速度及び姿勢の最適な推定値を得る。
(もっと読む)
位置検出装置及び位置検出方法
【課題】サイクルスリップ等が発生した場合に対して、整数値バイアスの確定処理を一からやり直す必要を無くすこと。
【解決手段】本発明による位置検出装置は、移動局が所定周期毎に観測する衛星信号の搬送波位相の積算値に含まれる整数値バイアスを推定して移動局の位置を検出する位置検出装置であって、整数値バイアスの推定に用いる共分散行列を、前回周期で導出した各衛星に係る共分散を用いて更新し、今回周期で新たな衛星が観測可能となった場合、前記共分散行列に、該新たな衛星に係る共分散として所定の初期値を追加することを特徴とする。
(もっと読む)
搬送波位相式測位装置
【課題】測位側が移動している場合であっても高精度な測位を実現できる搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で衛星信号を受信して取得する衛星データに基づいて移動局の位置を測位する搬送波位相式測位装置34であって、移動局30及び既知点20で受信した衛星信号の搬送波位相の積算値の1重又は2重位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアスの1重又は2重位相差とを状態変数とするシステムモデルに、移動局の移動履歴から該移動局の現時刻の状態を予測する移動体モデルを導入して、複数エポックでの衛星データに基づいて前記状態変数を推定して測位を行う。
(もっと読む)
測位装置及び初期化方法
【課題】移動局の動きによらず、慣性航法機器の初期化を可能にする。
【解決手段】回転レバー,移動レバーの状態により、初期化方法を選択する測位装置として、直行する3軸の角速度と加速度を出力する慣性センサ手段と、測位情報の信号により位置及び速度を出力する受信手段と、クローラを稼動させる移動レバーがオフで、クローラの上にある筐体を回転させる回転レバーがオンである場合、受信手段からの出力位置をもとに筐体の位置,方位及び姿勢を計算し、移動レバーがオンである場合、受信手段の出力位置及び速度,慣性センサ手段の出力角速度及び加速度をもとに出力角速度及び加速度のドリフト量と、位置,速度,方位及び姿勢の誤差量を計算し、ドリフト量及び誤差量だけ補正して、筐体の位置,方位及び姿勢を計算する演算手段を備える。
(もっと読む)
搬送波位相式測位装置
【課題】サイクルスリップが発生した場合であっても、整数値バイアスの確定処理を一からやり直す必要の無い搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で測定される衛星信号の搬送波位相の積算値又はその位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアス又はその位相差とを状態変数とし、複数の観測周期での衛星データに基づいて前記状態変数を推定して移動局の測位を行う搬送波位相式測位装置であって、位相積算値のサイクルスリップの有無を検出するサイクルスリップ検出手段を備え、サイクルスリップが検出された場合は、サイクルスリップの検出された衛星に係る状態変数だけを初期化して測位を継続する。
(もっと読む)
測量スティッチングを用いる位置測定方法
モバイル通信デバイスは、異なる出来事の間に取得されてもよい衛星輸送手段のような複数の参照基地局および/または基地局からの測量値を用いて初期設定されるカルマンフィルターのような測位フィルターを含む位置決定に関する方法を用いる。したがって、当該測位フィルターは、同じ測量の出来事の間の少なくとも3つの異なる信号の第1の取得を必要することなく、位置の推定値に関して用いられてもよい。 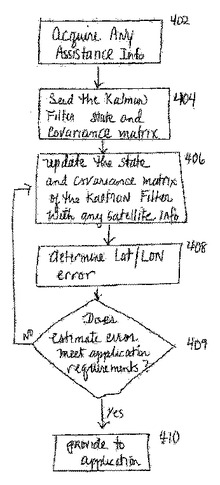 (もっと読む)
(もっと読む)
測位装置、ナビゲーションシステム
【課題】GPS衛星が捕捉困難な状態であっても、従来の地図データを使用して、精度よく測位することができる測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段81により移動体の位置を検出する測位装置9において、移動体の挙動情報を検出する第1及び第2の自律センサ2、4、3と、測位結果に第1の自律センサによる検出情報を累積して推定位置及び推定方向を検出する位置検出手段82と、推定位置に基づき地図データ記憶手段5を参照し対応するリンクから所定距離の地図データ推定位置を検出する地図データ測位手段83と、測位結果に第2の自律センサによる検出情報を累積して累積推定方向を検出する方向検出手段84と、推定位置及び地図データ推定位置並びに推定方向及び累積推定方向をカルマンフィルタに適用して移動体の位置を推定する最尤位置推定手段85と、を有することを特徴とする。
(もっと読む)
ナビゲーション装置、位置検出方法
【課題】自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供すること。
【解決手段】移動体の位置を検出するナビゲーション装置1において、地図データを記憶した地図データ記憶手段13と、移動体の挙動情報を検出する自律センサ12と、GPS等の電波航法測位手段11、10aによる測位結果に自律センサ12による検出情報を累積して移動体の慣性測位位置を検出する慣性測位手段10bと、特徴的な挙動を示した特徴的位置31を検出する特徴的走行位置検出手段10dと、特徴的位置31に基づき地図データ記憶手段13を参照し、当該特徴的位置31に対応する道路位置22の位置情報を抽出する補正量検出手段10eと、特徴的位置31が道路位置22に近接するという条件に基づき、カルマンフィルタにより特徴的位置31を補正する位置補正手段10fと、を有することを特徴とする。
(もっと読む)
移動軌跡算出方法、移動軌跡算出装置及び地図データ生成方法
【課題】比較的低価格のジャイロ及び速度(加速度)センサを使用しても、実際の移動軌跡との誤差が小さい軌跡を算出できる新しい算出方法を実現。
【解決手段】移動物体の第1地点Pから第2地点Qへの間の移動軌跡を移動後に算出する移動軌跡算出装置であって、第1地点Pから第2地点Qへの移動中の移動方向及び移動速度を検出して移動データとして記憶する記憶装置21と、記憶した移動データを順方向に使用して、第1地点から第2地点への順方向移動軌跡を算出する順方向軌跡算出部31と、記憶した移動データを逆方向に使用して、第2地点から第1地点への逆方向移動軌跡を算出する逆方向軌跡算出部32と、順方向移動軌跡と逆方向移動軌跡を、第1地点と第2地点に対する位置に応じて変化する重み付け比で合成する合成処理部33と、を備える。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】より精度よく測位した位置を補正し、マップマッチングした場合でも非連続な走行軌跡となることが低減される測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段1により移動体の位置を検出する測位装置10において、移動体の挙動情報を検出する自律センサ2、3と、電波航法測位手段1による測位位置に自律センサ2,2による検出情報を累積して自律航法測位位置を検出する位置検出手段と、を有し、位置検出手段は、測位位置又は自律航法測位位置のいずれか、及び、過去の自律航法測位位置の履歴に基づき予測した予測位置に基づき、移動体の位置を推定することを特徴とする。
(もっと読む)
自車両位置推定装置
【課題】移動体の実時間測位装置において、不動物に関する事前のデータ収集を必ずしも必要としない低コストで高精度で信頼性の高い装置を実現することである。
【解決手段】環境特徴評価部141は、環境特徴取得装置120によって取得した環境特徴の種類や、相対位置に関する情報の精度や信頼度を算定する。自車両運動評価部142は、環境特徴評価部141にて評価された環境特徴の位置情報の時間変化に基づいて、その変化が観測された期間に移動した自車両の運動(速度ベクトルなど)を求め、同時にその運動の精度や信頼度を算定する。自車両位置評価部132では、自車両位置の観測値、環境特徴の位置情報、推定した自車両運動などに基づいて自車両の絶対位置を求める。また、同時にその運動の精度や信頼度を算定する。このとき、自車両の絶対位置と環境特徴の相対位置に基づいて、環境特徴の絶対位置やその精度などを同時に求めてもよい。
(もっと読む)
車両位置推定装置及び地図情報作成装置
【課題】目印の位置データを予め記憶することなく、自車両の絶対位置を精度良く検出できる車両位置推定装置を提供する。
【解決手段】自車両の絶対位置及び自車両の絶対位置を基準とした周囲の目印(ランドマーク)の相対位置を複数回検出し、当該絶対位置及び相対位置に基づいて誤差の最も小さい目印の絶対位置を推定すると共に、当該目印の絶対位置と検出される目印の相対位置に基づき前記自車両の絶対位置を推定する。
(もっと読む)
位置推定装置、位置推定方法及びプログラム記録媒体
【課題】 推定値が逸脱したか否かを検査し、誤った推定値の場合は回復を試みることのできる位置推定装置を提供する。
【解決手段】 予測部11はオドメトリセンサ17が搭載された移動体の位置を予測する。観測部12は環境内の特徴点を追跡する。予測正誤チェック部13は、予測部11における位置の予測の正誤を判断する。予測修正部14は、予測を修正する。更新部15は、正しい予測に基づいて移動体の位置及び/又は姿勢を更新する。
(もっと読む)
車両位置推定装置
【課題】目印の位置データを予め記憶することなく、自車両の絶対位置を精度良く検出できる車両位置推定装置を提供する。
【解決手段】自車両の絶対位置及び自車両の絶対位置を基準とした周囲の目印(ランドマーク)の相対位置を複数回検出し、当該複数回検出された自車両の絶対位置及び目印の相対位置に基づいて誤差の最も小さい目印の絶対位置を推定すると共に、当該目印の絶対位置と検出される目印の相対位置に基づき自車両の絶対位置を推定する。
(もっと読む)
車両位置測位装置及び車両位置測位方法
【課題】 軌道上を走る車両において通常の衛星測位を実施すると、軌道位置の考慮がされないため、軌道を外れた位置に測位結果が算出されることがある。
【解決手段】 GPS衛星から観測データを受信するGPS受信機と、前記車両の車両速度を検出する車速検出器と、前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道方向とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算する演算部とを備えたようにした。
(もっと読む)
移動体搭載測位装置及びその測位方法
【課題】移動体搭載の測位装置において、位置データを受信することが出来る衛星の数が不足している場合でも、GNSS衛星からのデータのみで測位演算をすることによって、移動体搭載の測位装置の小型化、単純化を図る。
【解決手段】位置データを受信できる衛星が不足した場合には、過去の測位データから現在の車両1の速度ベクトルを推定して、車両1はこの速度ベクトルを延長した直線30上を走行しているものとして、GNSSデータから求めたGNSS衛星20と車両1との距離ρ1を用いて、車両1の測位位置を特定する。
(もっと読む)
移動体制御装置及び移動体制御方法
【課題】軽量、小型で、かつ安価なセンサ等を利用して複合航法システムを実現できる移動体制御装置を提供する。
【解決手段】慣性航法データと測位データとに基づいて状態推定フィルタ演算を行い、移動体の位置、姿勢、速度の情報を出力する。このとき、慣性航法データについての状態推定フィルタ演算における、移動体の位置、姿勢、速度の各誤差を演算するにあたり、位置、姿勢、速度の各々を表す状態変数に係り、それよりも要素数の少ない状態変数で特定される微小変化単位四元数として表示された誤差情報を用いて、位置、姿勢、速度の各誤差を演算し、当該誤差情報を乗じることで位置、姿勢、速度の情報が補正され、移動体の制御に供される移動体制御装置である。
(もっと読む)
測位装置及び測位方法及びプログラム
【課題】厳しい受信環境下での乱れた走行軌跡を滑らかにし、測位精度の劣化を抑える。
【解決手段】測位装置100は、測位信号を送信する人工衛星から前記測位信号を受信して所定の情報を抽出し、前記所定の情報を使用して測位計算を行って緯度経度座標値を出力する測位計算部101と、初期値と初期誤差共分散行列と駆動雑音行列と観測雑音行列を読込み、前記初期値と前記初期誤差共分散行列と前記駆動雑音行列と前記観測雑音行列を使用して時間外挿値と伝播誤差共分散行列を計算し、前記測位計算部101が出力した緯度経度座標値を読込み、前記緯度経度座標値を地球楕円体面座標値に変換し、前記地球楕円体面座標値を使用して観測更新値と更新誤差共分散を計算し、前記地球楕円体面座標による観測更新値を緯度経度座標値に変換して出力する整形処理部102と、前記整形処理部102が出力した緯度経度座標値を表示する測位結果表示部103とを備える。
(もっと読む)
141 - 160 / 189
[ Back to top ]