
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
21 - 40 / 189
移動体測位方法、移動体測位装置
【課題】高精度な移動体測位方法を実現する。
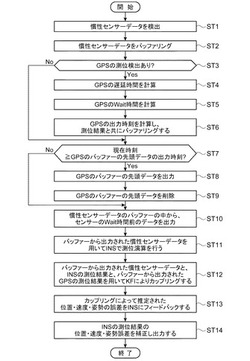
【解決手段】移動体測位方法は、慣性センサーデータをバッファリングすることと、バッファリングされた前記慣性センサーデータを用いてINS測位演算を行うことと、現在時刻に対するGPS測位の遅延時間を計算することと、GPSデータの出力時刻とGPS測位結果とをバッファリングすることと、バッファリングされた前記GPS測位結果とINS測位結果との時刻同期をとることと、バッファリングされた前記慣性センサーデータと、前記慣性INS測位結果と、バッファリングされた前記GPS測位結果と、をカップリングし、位置・速度・姿勢の誤差を推定することと、前記位置・速度・姿勢の誤差を前記INS測位結果にフィードバックし、補正する。GPSデータと慣性センサーデータの時刻同期をとり、正確なINS測位結果の誤差補正を行うことによって、高精度な移動体測位を行うことができる。
(もっと読む)
測位システム、測位方法

【課題】慣性センサーデータとGPS測位データとを融合した高精度な測位方法を実現する。
【解決手段】測位方法は、慣性センサーデータとGPS測位データとを融合して移動体を測位する測位方法であって、慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、GPS測位データに基づき、拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、推定された位置誤差・速度誤差・方位角誤差・ジャイロバイアス誤差・加速度バイアス誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、を有する。
(もっと読む)
経路演算装置
【課題】リアルタイムな情報に対応した経路探索を効率的に実行する。
【解決手段】経路探索前に隣接メッシュとの境界上の図郭ノードと他の図郭ノードとの間のメッシュ内の経路コストを予め計算し、メッシュコストデータを生成する。出発地から目的地までの経路探索の際に、出発地近傍の図郭ノードと目的地近傍の図郭ノードとの間の移動経路は、メッシュコストデータが最小となるように探索する。このようにして探索した移動経路に含まれる道路リンクのうち、メッシュ内の経路コストの計算に用いたリンクコストと、リアルタイム交通情報を考慮したリンクコストとの差が閾値以上の場合、そのリンクを含むメッシュにおける現況交通情報を考慮したメッシュ内の経路コストを再計算してメッシュコストデータを更新する。更新したメッシュコストデータに基づく再探索によって、メッシュ内経路を含む移動経路を特定する。
(もっと読む)
加速度検出方法、位置算出方法及び加速度検出装置
【課題】移動体の加速度をより適切に検出するための新しい手法の提案。
【解決手段】姿勢調整部20は、移動体に設置された姿勢センサー4の検出姿勢を、移動体に設置された加速度センサー3の検出加速度ベクトルと移動体の移動に係る所与の参照ベクトルとを用いて調整する。そして、座標変換部30は、姿勢調整部20により調整された検出姿勢を用いて、移動体のローカル座標系から絶対座標系への座標変換に係る変換係数を求め、当該変換係数を用いて、加速度センサー3の検出加速度ベクトルを絶対座標系における加速度ベクトルに座標変換する。
(もっと読む)
状態推定装置、状態推定方法および状態推定プログラム
【課題】高速に状態ベクトルを収束させる。
【解決手段】状態推定装置は、非線形カルマンフィルタKF1〜KF10と、各フィルタの観測残差ekのノルムの最大値を検出する観測残差ピークモニタPM1〜PM10と、互いに異なる初期姿勢を示す初期値INI1〜INI10を生成する初期値生成部130Aを備える。初期値INI1〜INI10が与えられると、非線形カルマンフィルタKF1〜KF10は並列に動作する。そして、比較部110は、観測残差ekのノルムの最大値を比較し、最も小さいノルムの最大値に対応する非線形カルマンフィルタの出力を選択するように選択部120を制御する。
(もっと読む)
移動体位置測定装置
【課題】車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供する。
【解決手段】本自動車及び車載情報システム100の実時間測位部1は、車載のカメラ4から参照地点付近で撮影された複数の実画像を入力し、その中から特徴部を抽出して第1の特徴情報(c1)とする第1の特徴抽出部11と、地図DB5から対応する第2の特徴情報(c2)を読み出して取得する第2の特徴抽出部12と、第1、第2の特徴情報を入力して特徴部を比較してマッチングすることにより、各特徴部の位置を推定し、当該位置をもとに、SFM手法を用いて、移動に伴う各時点の自車の位置と上記各特徴部の位置との相対的な位置関係を演算することにより、自車現在位置を推定して第2の位置情報(L2)として出力する特徴マッチング部13と、を有する。
(もっと読む)
カーナビゲーション装置
【課題】自車位置の算出精度を向上できるカーナビゲーション装置を提供する。
【解決手段】カーナビゲーション装置は、自車両の位置(自車位置)を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
(もっと読む)
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
地図表示装置及び地図表示プログラム
【課題】隣接して表示される2つの地図上の道路が1本の連続した道路と誤認されるのを防止する。
【解決手段】隣接する2つの地図上にそれぞれ表示される2つの軌道が該2つの地図の境界を越えて連続する1つの軌道と誤認される可能性の有無を判定する誤認判定部と、誤認判定部が誤認の可能性があると判定したときに誤認の可能性が無い地図表示に修正する地図表示修正手段とを備えた地図表示装置が提供される。
(もっと読む)
車両用現在位置検出装置
【課題】角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正する。
【解決手段】ナビゲーション装置10において、演算部22は、換算ゲインを用いジャイロ12の出力値に基づいて車両の方位変化量を算出する。演算部21は、車速センサ11の出力値に基づいて車両の移動距離を算出する。現在位置検出部14は、算出される方位変化量および移動距離に基づいて車両の現在位置や進行方向を算出する。誤差推定部25は、GPS受信機13からの出力値と現在位置検出部14での算出値との差を観測値として算出し、その観測値に基づいて換算ゲインの誤差を状態量として推定する。補正部26は、推定される状態量に基づいて換算ゲインを補正する。換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を所定値に置き換える。
(もっと読む)
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
ヨー角初期化異常判定装置及び方法
【課題】慣性装置が搭載された車両が移動するような場合に、ヨー角初期化が異常であるか否かを容易に判定することができるヨー角初期化異常判定装置及び方法を提供すること。
【解決手段】ヨー角初期化異常判定装置200は、GPS受信機によって算出された方位角の平均値を算出し、IMUによって計測されたヨー角度の平均値を算出し、アルゴリズム速度によって移動体の移動方向が前進か後退かを判定し、判定した移動方向に基づいて、方位角の平均値と、ヨー角度の平均値との差分を算出し、算出した差分が閾値以上であるか未満であるかを判断する。さらに、算出した差分が閾値以上であると判断した場合にカウントをインクリメントし、算出した差分が閾値未満であると判断した場合にカウントをデクリメントし、計数したカウントが一定の値以上であるか否かを判断し、一定の値以上であると判断した場合に、異常状態と判定する。
(もっと読む)
位置検出装置、方法及びプログラム
【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
車両用現在位置検出装置
【課題】角速度に対する出力電圧特性が非線形のジャイロスコープを用いても、精度よく車両の走行軌跡を推定できるようにする。
【解決手段】角速度センサ22の出力値のゲイン誤差として、角速度センサ22の車両への取り付け角度を要因とする取り付け角ゲイン誤差と、角速度センサ22の角速度に対する非線形ゲイン特性を要因とする角速度ゲイン誤差とを区別して推定する。すなわち、カルマンフィルタAにより取り付け角ゲイン誤差を推定した後、カルマンフィルタBにより取り付け角ゲイン誤差および角速度ゲイン誤差の推定を実施する。
(もっと読む)
加速度算出方法、位置算出方法及び加速度算出装置
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
位置標定装置、位置標定方法および位置標定プログラム
【課題】GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
(もっと読む)
慣性センサ,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法
【課題】軽量,小型および安価であって、低精度なセンサ群とカルマンフィルタを組み合わせることにより姿勢情報の計算にあたって四元数を用い、センサの観測値から計算する修正量も四元数とすることにより高精度で移動体の姿勢誤差を推定し、十分な精度で移動体の姿勢を推定することができるジャイロ,加速度計,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法を提供する。
【解決手段】航空機にジャイロ装置11,加速度計12,磁気センサ14および速度計13を搭載する。演算器15,カルマンフィルタ19でこれらセンサに基づいた演算を行い、航空機の姿勢情報を計算する。姿勢情報の計算には四元数を用い、観測値から計算する修正量も四元数とすることにより、これを計算値に乗じることにより正確な姿勢を推定する姿勢推定装置を実現する。
(もっと読む)
姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラム
【課題】3次元の姿勢角を求めるための計算を効率よく行うことができ、演算時間を短縮でき、かつ演算速度を向上することができる姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラムを提供する。
【解決手段】姿勢制御装置は、状態フィードバックを用いて移動体の姿勢の推定を行う。この姿勢制御装置は、姿勢及び姿勢変化率が入力され、これらを四元数に変換する入力部101と、四元数に変換された姿勢及び姿勢変化率を使用してフィルタ演算するフィルタ演算部102と、フィルタ演算により得られた姿勢に基づき移動体の姿勢制御を行う姿勢制御部104とを有し、フィルタ演算部102は、姿勢の推定を行うためのフィルタ演算に球面線形補間を使用する。
(もっと読む)
21 - 40 / 189
[ Back to top ]