
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
181 - 189 / 189
航法装置、航法システム、航法測位方法、および車両
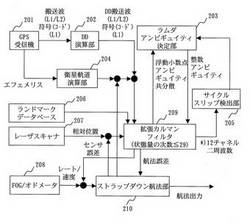
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。 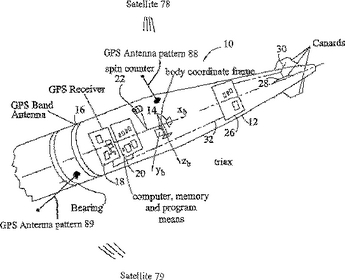 (もっと読む)
(もっと読む)
相互補完ナビゲーションシステム

【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
複数のナビゲーションコンポーネントの整合システム及び方法
一例示のナビゲーションシステムが、移動体(105)の第1のロケーションにおけるマスタナビゲーションコンポーネント(110)と、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネント(115)とを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器が、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブの補正されたナビゲーション測定データを変換する。一例示のナビゲーションシステムは、移動体の第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントは、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器は、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換する。 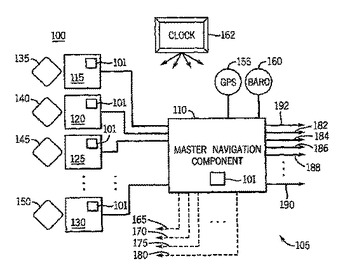 (もっと読む)
(もっと読む)
移動体端末及び加速度情報に基づき位置を決定するための方法
移動体端末が受信した無線通信信号(GPS信号、衛星信号、セルラー信号、ワイド・エリア・ネットワーク信号、無線ローカル・ネットワーク信号等)に基づいて加速度計測回路が校正される。そして、当該移動体端末の位置が、校正された加速度計測回路を利用して決定される。よって、加速度計測回路の校正により、その精度が改善され、結果として位置決定精度も改善される。異なる実施形態では、移動体端末の位置は、(GPS信号などの無線通信信号を用いて推定される)第1の位置と、(第1の位置からの移動体端末の移動距離を計算するために利用される加速度情報に基づいて計算される)第2の位置とを結合することにより決定される。 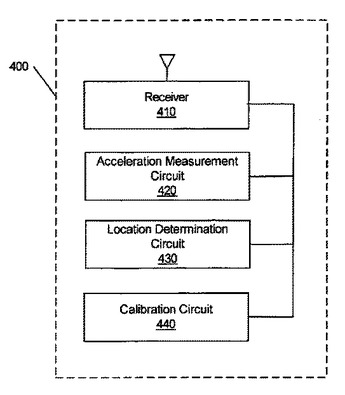 (もっと読む)
(もっと読む)
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 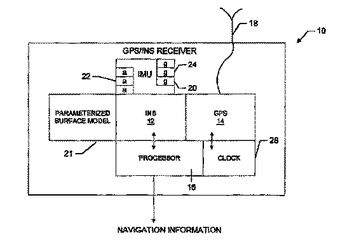 (もっと読む)
(もっと読む)
測定及び記憶された重力傾度を用いて慣性航法測定値の精度を改善する方法及びシステム
【課題】 重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムを提供する。
【解決手段】 一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。その方法の一実施形態は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
(もっと読む)
181 - 189 / 189
[ Back to top ]