
Fターム[2F129GG14]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 誘導経路 (121)
Fターム[2F129GG14]に分類される特許
81 - 100 / 121
運転操作支援装置
【課題】前方車両を追い越す場合などの自車両が車線変更を伴う挙動を行う場合に、運転手の運転操作を適切に支援する。
【解決手段】ナビゲーション装置1は、前方車両と自車両との車間距離や後方車両と自車両との車間距離などの自車両の挙動に対して動的に変化する周囲状況を取得し、その取得した周囲状況を反映した表示ガイダンスを表示すると共に音声ガイダンスを出力する。自車両が走行車線から追い越し車線に車線変更する場合や追い越し車線から走行車線から車線変更する場合に、運転手の運転操作を適切に支援することができる。
(もっと読む)
運転支援装置

【課題】本発明の解決しようとする課題は、ナビ協調制御装置の使い勝手を向上するため、制御開始と終了を自動的にガイドする手段を提供することにある。
【解決手段】地形情報算出手段、入出力手段、協調制御手段、協調制御開始終了設定手段を設けたナビ協調制御装置において、地図上の現在位置とドライバの操作情報をもとに、次回の走行時に開始終了の誘導ガイダンスを行う機能を、協調制御開始終了設定手段に組み込むことにより実現する。
(もっと読む)
車両内の、およびその車両からの車両関連情報を送信するための方法、および装置
【解決手段】 方法およびその方法を実行するための装置であって、その方法および装置において、位置検出用の通信手段および受信手段を経由して受けとられる車両関連情報であって、この情報は、相互作用を調整するための手段を使用して評価され、さらに、それは、これらの移動端末のディスプレイ内の車両内に装着された移動端末の無線ラジオネットワーキング用の手段によって再生される。 (もっと読む)
安全なルートを案内するルート情報システム
【課題】治安の悪いエリアや事故の多い地点を回避し、目的地への安全な移動を確保するという視点で経路の案内を行うルート情報システムの提供。
【解決手段】測位機能を備えた無線通信端末100からの要求に応じて現在位置から所定の目的地までのルート情報を生成するルート情報システムのルート情報サーバ200は、地図情報に対応するエリア中の事件/事故の発生状況に基づき、地図情報中の任意の地点における危険の度合い(危険度)を付与した危険情報を記憶する危険情報記憶部と、前記無線通信端末の現在地に対応する危険情報を参照し、単位区間あたりの危険度が所定レベル以下となるようルート情報を生成し、前記無線通信端末に送信するルート生成部と、を備える。
(もっと読む)
合流支援装置及び合流支援方法
【課題】自車両の合流時における周囲車両の走行状況や自車両の合流地点に対する位置などに柔軟に対応し、自車両の現在の走行環境において最適な表示画像を表示して、自車両の運転者による運転操作を適切に支援することができるようにする。
【解決手段】コントローラ1が合流車線を走行する自車両の位置及びその挙動と、自車両の周囲を走行する周囲車両の位置及びその挙動と、自車両の周囲の道路環境とに基づいて、自車両周囲の道路環境を表す拡大地図画像上に自車両を表す自車両マークと周囲車両を表す周囲車両マークとを重畳した表示画像を作成する。この際、自車両の周囲を走行する各周囲車両の自車両に対する衝突余裕時間TTCや、自車両が走行している合流車線の本線車線に対する位置関係などに応じて、自車両の合流の際に運転者が特に注意を要する領域の画像が多く表示できるように、表示画像上における自車両マークの表示位置を決定する。
(もっと読む)
車載情報装置
【課題】ユーザに対して各種の情報を提供すると共に、その情報に関する詳細情報をユーザの要求に応じて提供する車載情報端末を実現する。
【解決手段】運転状況に応じて各種の運転情報を出力し(ステップS20)、その運転情報に応じた待ち受け単語を設定する(ステップS30)。その後、ユーザが発した音声を検出し(ステップS50)、検出された音声に基づいて、設定された待ち受け単語をユーザが発声したか否かを判定する(ステップS60、S70)。ユーザが待ち受け単語を発声したと判定された場合、ステップS20において出力された運転情報に関する詳細情報を出力する(ステップS80)。
(もっと読む)
車載地図データ生成装置
【課題】本発明は、受信したノード情報を追加記録して次回に再利用することができる車載地図データ生成装置を提供することを目的とする。
【解決手段】測位手段で得た自車位置の履歴である車両の走行軌跡を基にリンク情報を生成し地図データに追加記録する車載地図データ生成装置であって、路側に設置されたビーコンから送信されるノード情報を受信し、ビーコン設置ポイントのノード情報として地図データに追加記録するノード情報追加手段を有する。
(もっと読む)
消費カロリー算出機能付ナビゲーション装置
【課題】 車両が走行を開始する前に出発地点から目的地点に到着するまでに運転者が消費するカロリーの予測を行い、運転者が希望する消費カロリーに見合った経路案内を行うナビゲーション装置の提供する。
【解決手段】 経路設定手段で設定された経路により現在位置から目的地点に到着するまでの走行時間及び運転者が行う操作を運動量予測部により予測し、走行時間と操作量に対応する消費カロリーを消費カロリー情報及びユーザー情報を備えた消費量データベースの情報に基づいて算出する。
(もっと読む)
ユーザのルートに基づいて適切な興味のあるポイントの情報を決定する方法および装置
ユーザに興味のあるポイントの適切さを判定する方法、装置、およびシステムが記述される。アプリケーション・サーバは、他のユーザ好みのみならず、ユーザの位置および速度に関する情報を受信し、探索空間を調節し、興味のあるポイントをフィルタして、ユーザに適切な興味のあるポイントを特定する。興味のあるポイントの適切さは、ユーザのルート、位置、および速度に基づく。 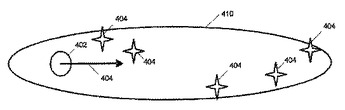 (もっと読む)
(もっと読む)
経路案内装置
【課題】施設を検索して通過点として設定した際に、目的地に最も早く到着可能な施設を通過点として適切に設定することができる経路案内装置を提供する。
【解決手段】カーナビゲーション装置は、目的地までの経路案内中に周辺施設を検索した場合は、施設を経由して目的地までの総経路距離または総移動所要時間を計算し、その総経路距離または総移動所要時間が短い順を示すリストを表示する。これにより、最上位に表示された施設を経由して目的地に到達することにより、目的地に早く到達することができる。
(もっと読む)
情報提供装置
【課題】運転者が道に迷ってしまった場合に、あらためて運転者に経路設定の操作をさせずに適当な目的地の候補の情報を提供することができる情報提供装置を提供する。
【解決手段】運転者の視線方向を顔画像ごとに検出する視線検出手段12と、車両の位置情報を取得する位置情報取得手段26と、顔画像ごとの視線方向に基づき走行経路に迷いを生じているか判定し、生じている場合、運転者の視線方向の系列を抽出する判定手段21と、複数の運転者における履歴情報を格納するデータベースに、抽出された視線方向の系列と相関関係のある視線方向の系列を含む履歴情報があるかの検索依頼情報を生成し検索を行う手段に送信する処理手段20と、情報の表示手段17と、受けた履歴情報に基づき到達地の情報と到達地までの経路情報を表示手段に表示させる表示制御手段18とを備える。
(もっと読む)
進路設定方法、装置、プログラム、および自動運転システム
【課題】現実として起こりうる状況下においても安全性の確保を図ることができる進路設定方法、装置、プログラム、および自動運転システムを提供する。
【解決手段】複数の物体の位置と各物体の速度を含む内部状態とを少なくとも記憶する記憶手段を備えたコンピュータが、前記複数の物体の位置および内部状態を前記記憶手段から読み出し、この読み出した前記物体の位置および内部状態に基づいて、前記複数の物体の各々が時間の経過とともに取りうる位置の変化を時間および空間から構成される時空間上での軌跡としてそれぞれ生成し、この生成した軌跡を用いることによって前記複数の物体の進路の確率的な予測をそれぞれ行い、この予測した結果に基づいて、前記特定の物体が取りうる進路と前記その他の物体が取りうる進路との干渉の程度を定量的に示す干渉度を算出し、この算出した干渉度に応じて前記特定の物体が取るべき進路を選択する。
(もっと読む)
車両用走行制御装置
【課題】ユーザが意図せずに車両制御が作動してしまうのを防ぐ。
【解決手段】ナビゲーション装置4が自車走行路を誤認識している可能性があると判断すると、ナビゲーション装置4から得られる自車走行路情報、および、車両状況に基づいて行われる車両制御を禁止するとともに、車両制御の再開をユーザに促し、ユーザから車両制御を再開する指示が出されると、車両制御の禁止を解除する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】安全運転支援と実用性との両立を図る運転支援方法及び運転支援装置を提供する。
【解決手段】ナビゲーション装置1のナビユニット2は、自車位置周辺の地理的状況、周辺車両状況及び自車両の運転状況のうち少なくとも一つに基づいて、警告レベルLを設定するCPU10を備える。また、運転者の脇見を判断する画像プロセッサ20に基づき、運転者の脇見を検出した際に、設定された警告レベルLに基づいて、脇見を警告する。
(もっと読む)
車両速度制御装置および同装置における目標速度設定方法ならびにプログラム
【課題】マップマッチングなどの自車両位置誤差補正による急激な目標速度値の変化を予め考慮して誤差のない状態での目標速度値よりも事前に速度変化を与え、速度の急変、目標地点の超過を防ぎ、安全で快適なドライビングが行えるようにする。
【解決手段】車両速度制御装置(目標速度計算部15)は、誤差を含む可能性のある地図情報および位置測位手段が与える現在位置情報から得られる目標速度値に、誤差がどの程度含まれているかを示す位置誤差確率を推定演算し(現在位置誤差推定部13)、かつ、人間の感性モデル(人間感性モデルDB14)から搭乗者が不快に感じない速度制御パターンを生成して、車両の現在位置から目的地に至る経路での速度制御目標値を、速度制御コントローラ16の要求精度に従う許容誤差範囲から計算し、制御する構成とした。
(もっと読む)
運転者適応型運転行動推定装置
【課題】運動行動の推定精度の高い運転者適応型運転行動推定装置を提供する。
【解決手段】自車両の現在位置を表す位置情報を求める位置算出部30と、目的地の設定や最適な経路の設定などを行う経路設定部31と、経路設定部31にて設定された経路に従って、経路中に設定される直近の対象ポイントまでの距離を算出する距離算出部32と、運転者の運転操作の傾向を表す運転傾向パラメータを記憶するパラメータ記憶部33と、運転者の運転操作が反映される車両情報及び運転傾向パラメータに基づき運転者の行動を推定する運転行動推定部35と、対象ポイントでの運転者の運転行動を認識する運転行動認識部36と、運転傾向パラメータの更新を行う運転行動適応部38を備えている。
(もっと読む)
道迷い危険個所表示装置
【課題】 任意の山域と徒歩道に対して、道迷いの危険がある利用者に道を外れる前に事前に通知すること。
【解決手段】 等高線データと歩道データを記憶した記憶手段と、等高線データと歩道データに基づき等高線を含む歩道地図を表示する表示手段と、表示された歩道地図上で出発点から目標地点に至る対象ルートの指定を利用者から受付け、前記対象ルートを複数の区間に分割し、各分割区間における歩道の類型を等高線データとの関係によって判定し、当該類型の歩道が道迷い危険箇所に該当する場合に警告を出力する判定手段とを備える。
(もっと読む)
車両制御装置
【課題】ノーマル走行条件で到達可能な給油所が残り1カ所になった場合でも、ドライバに到達可能な複数の給油所を提示することが可能な車両制御装置を提供する。
【解決手段】ノーマル走行条件で走行した場合に到達可能な給油所(第1供給所)が残り1カ所になった場合には、ガソリンの単位走行距離当たりの消費量が通常消費量より少ない低消費走行条件で走行した場合に到達可能な給油所(第2供給所)を検索して、各給油所を液晶ディスプレイ15の地図上に表示する(S1〜S7)。そして、操作部14を介して低消費走行条件で走行した場合に到達可能な給油所(第2供給所)が選択された場合には、車両2をこの選択された給油所(第2供給所)に対応する低消費走行条件で走行するように制御すると共に、この選択された給油所(第2供給所)への経路を探索して案内する(S8〜S13)。
(もっと読む)
車両用経路案内装置
【課題】目的地への到達時間が無闇に延びる恐れがない適切な経路案内を実施すること。
【解決手段】制御装置2は、出発地から目的地までの案内経路に基づいた案内動作の実行期間中には、自車両が走行中の車線を、前方カメラ19による撮影画像の解析並びに地図データを利用して認識すると共に、案内経路に沿った前方交差点に、右左折や直進などの進路規制があるか否かを、地図データやVICS受信機10の受信情報などに基づいて検出する。また、制御装置2は、経路案内の実施時において、自車両の運転者が意図する走行車線変更行動がターンシグナルスイッチ12を通じて検出された場合に、当該変更行動が、検出済みの進路規制車線または当該進路規制車線に続く車線への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたときに案内経路を逸脱する場合には、自車両の運転者向けの警報信号をスピーカ8aから発生する。
(もっと読む)
エージェント装置、エージェント機能付車載用ナビゲーション装置、エージェント出力方法
【課題】 時間が経過しても飽きが来ないようにする。
【解決手段】 プログラム記憶部28に、目的地の場所、季節等の状況別に、内容が種々異なるユーザ性格判別用の質問と、エージェントの性格別の容姿・仕草を画像表示するためのアニメーション画像データを用意しておく。また、会話文のテキスト音声合成を行う音声合成部30に性格別のイントネーションデータベース群303を用意し、エージェントの社交性、協調性、活動性、情緒性等の性格を変更可能としておく。走行中でエージェントが空いた時間に、エージェント処理部27は目的地の場所、季節等の状況情報を入手し、表示装置1とスピーカ3を用いて画像と音声により現出させたエージェントにより状況に応じた違和感の無いユーザ性格判別用の質問をさせ、マイク入力されたユーザの回答結果からユーザの性格を判別し、ユーザの性格に合わせてエージェントの性格を可変させる。
(もっと読む)
81 - 100 / 121
[ Back to top ]