
Fターム[2G053DB26]の内容
磁気的手段による材料の調査、分析 (13,064) | 磁気センサ(探傷子)ヘッドの構造、駆動 (1,414) | ロボット、マニピュレータ (20)
Fターム[2G053DB26]に分類される特許
1 - 20 / 20
伝熱管の検査装置および検査方法
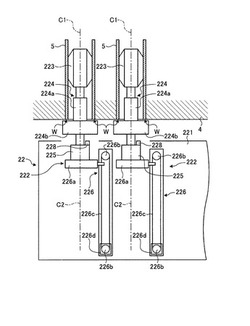
【課題】伝熱管のシール溶接部を遠隔操作によって検査すること。
【解決手段】伝熱管5が開口する管板4の管板面に固定される検査ロボットに設けられ、伝熱管5が管板4に溶接されたシール溶接部Wの検査を行う伝熱管5の検査装置20であって、伝熱管5に対して挿抜される挿入部223と、シール溶接部Wにおける欠陥の有無を検出する検出手段を有した検出部224と、挿入部223の中心軸C2の回りに検出部224を回転させる回転機構225と、検査ロボットに対し、挿入部223、検出部224および回転機構225を、検出部224の回転の中心軸C2に沿って移動させる移動機構226と、を備える。
(もっと読む)
スポット溶接自動検査装置

【課題】溶接部位の検査時間を短縮しつつ、製品の品質のばらつきを抑制するスポット溶接自動検査装置を提供する。
【解決手段】スポット溶接自動検査装置20は、溶接検査機21、リカバリ溶接機22および検査用制御装置23を備えている。スポット溶接自動検査装置20は、第一溶接工程と第二溶接工程との間において、溶接検査機21によりスポット溶接機3により溶接された溶接位置の検査を行い溶接の良否を判定するとともに、判定結果が否である溶接位置に対してリカバリ溶接機22による再溶接を実施する。
(もっと読む)
細管用作業プローブとケーブルとの接続構造
【課題】プローブとケーブルとを容易かつ迅速に接続できると共に、ケーブルを切断することなく、容易かつ迅速に当該接続を解除することができる細管用作業プローブとケーブルとの接続構造を提供すること。
【解決手段】細管5の中を圧送されるプローブ10とケース11を貫いて導出されるケーブル9との間を水密封止するプローブ10とケーブル9との接続構造であって、後ケース11bは、コネクタ33を配設する収納空間部13と貫通穴12とを備え、ケーブル9は、コネクタ部31を先端部に有し貫通穴12にOリング32を介して嵌入されると共にノズル穴8aの内径D1よりも小さい外径D2を有するケーブル係止体30を備える。カバー20は、ケーブル貫通穴23を含む面で二分割可能に構成され、後ケース11b及びケーブル9に対してOリング28,29、シール部材27,37等を介してねじ35によって着脱自在に固定される。
(もっと読む)
検査モード切換え回路
駆動ピックアップモードとインピーダンスモードで同時に動作する構造の渦電流プローブ試験装置を提供する。渦電流プローブは2つのコイルを有する。渦電流プローブ試験装置はまた、信号発生装置、出力装置及び切換え部を含む。切換え部は信号発生装置から2つのコイルへ入力信号を送る方法を切換える構造を有する。 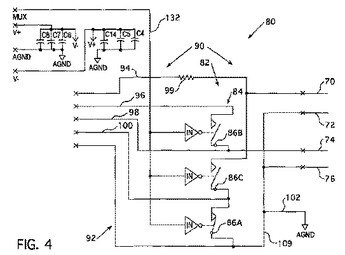 (もっと読む)
(もっと読む)
シール部材の非破壊検査
ロータの羽根付きホイールドラムの表面に延在する環状のシール用ワイパを検査するための装置。装置は、少なくとも2つの案内ホイール(36)を備えるキャリッジ(11A)を備えており、このキャリッジ(11A)が、プローブ(13)を、キャリッジが所定の位置にあるときにプローブが検査対象のワイパの縁に面してワイパの縁から所定の距離に位置するような位置に配置させて保持している。 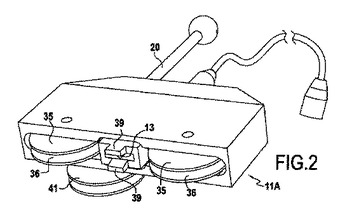 (もっと読む)
(もっと読む)
無繋索配管系検査システム
外部の制御およびデータ収集装置とワイヤーで接続されていない無繋索で移動可能な自律型検査ヘッドによって管を検査する装置および方法。検査ヘッドは、非破壊センサーを検査ヘッド内で電子的且つ機械的に制御するのに必要なすべての手段を一体化する、該ヘッドに取り付けられたモジュールとともに管内を移動する。  (もっと読む)
(もっと読む)
渦電流試験プローブの自動位置決め装置
管板の自動検査および修理装置。装置は、少なくとも1個の管把持部、および把持部ポッドを入れた摺動本体部を含む回転把持部ポッドと、少なくとも1個の管把持部、および工具ヘッド継手を含むハウジング部を有する。工具ヘッド継手は、渦電流試験プローブおよび少なくとも1種類の管修理工具に取り換え可能に取り付く。新規の自動固定管の把持部もまた、開示されている。シリアルバスは、装置内にある電子モジュールと接続すると共に、装置を、外部制御装置とも接続させる。  (もっと読む)
(もっと読む)
測定システム
【課題】被測定物の内部の複数の測定位置について短時間で測定を行う。
【解決手段】測定システム1は、被測定物IPに磁場を印加することにより被測定物IP内部の測定を行って、測定信号Smdを出力することができるセンサ部42,44,46であって、被測定物IPの互いに異なる測定位置WP2,WP4,WP6について測定を行うための複数のセンサ部42,44,46と、複数のセンサ部42,44,46からの測定信号Smdに基づいて被測定物IPの内部構造に関する情報処理を行う情報処理部10と、情報処理の結果を出力する出力部30と、を備える。
(もっと読む)
内部構造測定装置
【課題】プローブを測定部位に急激に接触させたとしても、測定部位に対してプローブを高精度に位置決めすることができる内部構造測定装置を提供することを課題とする。
【解決手段】プローブ30は、ブラケット14の先端39にガイド部材36を介してロボットのアームの中心軸31の方向に移動自在に取付けられ、ガイド部材36から前方へ突出させたプローブ30の取付部材33とガイド部材36との間に緩衝機構20、20を取付けている。
【効果】緩衝機構20は、プローブ30を鋼板表面86に急激に押し当てた場合に発生する衝撃エネルギーを吸収することができ、且つ衝撃エネルギーの吸収及び放出による変位を小さくすることができる。そのため、測定部位からのプローブ30のずれ量を低減することができるので、測定部位に対してプローブ30を高精度に位置決めすることができる。
(もっと読む)
内部構造測定装置
【課題】プローブを高精度で位置決めすることができ、且つ測定作業を効率よく実施することができる内部構造測定装置を提供することを課題とする。
【解決手段】内部構造測定装置は、プローブ及び一対のカメラを備えたロボットと、測定部位の3次元座標を記憶する記憶手段と、一対のカメラで得た画像を解析し座標に基づく測定部位の予想存在位置と現実存在位置とのずれを解消する補正値を求めると共にプローブ信号を受け部材の内部構造の評価を行う画像処理手段と、補正値によりロボット動作を補正する動作制御手段とを有する。
【効果】記憶手段と動作制御手段は、測定部位の3次元座標から焦点までのずれ量を検出させ(ST04)、ずれ量がゼロかどうかを確認させ(ST05)、ずれ量を補正させ(ST06)、一定距離プローブを移動させる(ST07)。よってプローブを高精度で位置決めすることができ、且つ測定作業を効率よく実施することができる。
(もっと読む)
溶接部の非破壊検査装置、及び溶接部の非破壊検査方法
【課題】溶接部を従来よりも簡易に非破壊で検査することができるようにする。
【解決手段】3つの脚部11a〜11cと、それら3つの脚部11a〜11cを相互に接続する胴部11dとが一体で形成されたフェライトコア11と、フェライトコア11の胴部11dに電線を巻き回すことにより形成されたコイル12とを有するプローブ10を構成する。そして、鋼板51a、51bがスポット溶接されることにより形成されたインデンテーション52aの内部に脚部11aが位置すると共に、その他の脚部11b、11cがインデンテーション52aの外部に位置するように、プローブ10を配置する。このようにした状態で、コイル12の両端に印加される交流電圧とコイル12に流れる交流電流とに基づくインピーダンスZと偏角θとを計測し、計測した結果に基づいて、ナゲット53の大きさを判定する。
(もっと読む)
渦電流を有する直線状キャビティを検査するための装置
【課題】渦電流を用い、これらの目的を達成することが可能である新規な非破壊検査を提案すること。
【解決手段】渦電流センサの連続的なブローチング移動による開放キャビティの検査。検査装置は、ロッド(22)の端部付近で傾斜路(30)に沿って横方向に装着されるセンサ(24)を含むプローブ本体(20)を備え、プローブ本体で作用する弾性偏倚手段を共に備える。
(もっと読む)
超音波検査クローラおよび原子炉ベセルにおけるジェットポンプ溶接部の検査方法
【課題】ジェットポンプの下部バッフルプレート取付箇所を含む部位を検査する検査装置を提供する。
【解決手段】検査表面の横断に適した検査アセンブリは、第1側面および底面を含み、第1側面が、第1検査表面に面するように適合化され、底面が、ギャップによって第1検査表面から隔てられた第2検査表面と係合するように適合化されたクローラ本体と、第1検査表面の間に吸引を創出するように適合化され、吸引が、クローラ本体を第1検査表面に対して偏向させる、クローラ本体における吸引モジュールと、第1検査表面と係合するように適合化されたクローラ本体上に取り付けられた少なくとも1つのローラと、センサを受けるためにマウントを有し、クローラ本体からギャップの中に延びる少なくとも1つのマストとを含む。
(もっと読む)
テープ送り用小型エアギャップ検査クローラ
【課題】 狭い入口ギャップに対応できる検査装置を提供する。
【解決手段】 エアギャップ検査装置(100)。エアギャップ検査装置(100)は、マスト(110)と、マスト(110)に装着された検査ヘッド(160)とを含んでもよい。マスト(110)は、伸縮自在の管の形態であってもよい。マスト(110)は、ばね鋼、ニッケル合金又は炭素繊維複合材料から製造することができる。また、マスト(110)は、収縮プロファイル及び膨張プロファイルを含むことができる。
(もっと読む)
非破壊検査装置及びそれを用いた非破壊検査方法
【課題】 従来は平面的な走査であったため、3次元的な形状の測定対象ではスタンドオフが一定に保てず、検査時の感度が一定しないという課題を有していた。
【解決手段】 3次元形状を有する被検査試料の形状を抽出し、そのデータを元に、高感度磁気センサが、非検査試料の表面から一定の位置で、一定の向きを保つように非検査試料上を動き、非検査試料の磁気を非接触で連続的に検出し、測定対象の磁気分布等を得て非破壊的な検査を行う。
(もっと読む)
反応炉ヘッド構成部材を検査する方法および装置
反応炉ヘッドの内面上に取り付けられた管状構成部材の非破壊検査を行う際に使用される反応炉ヘッド検査システムを開示する。この検査システムは、上昇アームと上昇アームの遠位端に取り付けられた検査装置とを含む可動台車組立体を含む。検査装置は、カラーの内面を管状構成部材の外面の極めて近くに位置させるのを可能にするのに十分な内部寸法の内面を有するC字形またはU字形カラーを含み、かつ磁気センサおよび/または渦電流センサを含む。複数のビデオ・カメラおよび光源もカラーの遠位端に設けられ、したがって、カラーが上昇アーム上に取り付けられたときに、カラーを制御可能に反応炉ヘッドの管状構成部材の極めて近くに隣接して位置させ、管状構成部材の表面の360°表示および検査を行うことができる。 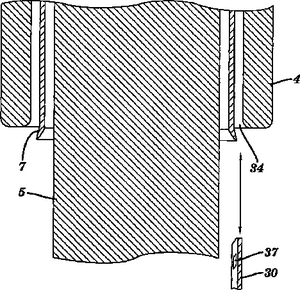 (もっと読む)
(もっと読む)
探傷装置および探傷方法
【課題】 被検査物に生じた欠陥の探傷時において、定量的にデータを取得して欠陥の有無を判定する探傷装置および探傷方法を提供する。
【解決手段】 探傷装置は、検査対象に対向し、前記検査対象の2点間に磁束を通すヨーク14と、前記検査対象に対向しつつ前記2点間を往復運動して、前記検査対象の欠陥箇所から漏洩する磁束を検出する磁気検出器22と、前記磁気検出器22からの検出信号を入力して、この検出信号から前記磁気検出器22が往復運動するときの折り返し位置におけるノイズ信号および前記検査対象の表面にある微小凹凸に起因するノイズ信号を除去し、設定値よりも大きな値の前記検出信号を検出すると前記検査対象の欠陥と判断する判定手段24とを有する構成である。
(もっと読む)
探傷装置
【課題】 安定性を向上させるとともに、柱状体に生じた傷を確実に探査させる探傷装置を提供する。
【解決手段】 探傷装置のロボット本体10は、柱状体を抱きかかえて昇降・旋回し、前記柱状体に生じた傷を探傷する装置であって、前記柱状体を挟み込む平行リンク機構16と、ストローク量にかかわらず設定値内の押圧力を前記平行リンク機構16に作用させて、前記柱状体の径の太さにかかわらず前記押圧力を前記柱状体に加えるガスバネ22とを有する構成である。
(もっと読む)
部品を検査するための装置およびシステム
【課題】最小値及び最大値を含む表面プロフィールを有する部品を検査する方法を提供する。
【解決手段】本方法(200)は、第1の位置指標を生成するように部品の表面に近接して渦電流プローブを配置する段階(202)と、第1の位置指標とは異なる第2の位置指標を生成するように部品の表面に近接して渦電流プローブを配置する段階(204)と、第1及び第2の位置指標間を補完して部品の表面の一部分のプロフィールを確定する段階(206)とを含む。
(もっと読む)
レーザ溶接継手の検査方法及び検査装置
【課題】レーザ溶接による薄板の重ね継手について、作製現場においてその溶接部を渦流探傷法により検査することができるように工夫すること。
【解決手段】表材1と裏材2をレーザ溶接により接合した重ね継手10の溶接部3を検査する方法を前提として、プローブ5を上記裏材2又は表材1の表面に沿って移動して、上記重ね継手10の未接合部と接合部における信号高さの変化を検出することである。
(もっと読む)
1 - 20 / 20
[ Back to top ]