
Fターム[3B150JA07]の内容
Fターム[3B150JA07]に分類される特許
41 - 60 / 364
ミシン
【課題】手縫い風縫目を縫製対象物に良好に形成することができるミシンを提供すること。
【解決手段】糸調子調整手段と、移送手段とを備え、上糸とは異なる色の下糸を用いて、上糸と下糸とが交絡する縫目を縫製対象物に形成するミシンにおいて、糸調子調整手段及び移送手段が制御され、上糸と下糸との交絡点が縫製対象物の上面よりも下部にある縫目のみを含む第1縫目と、上糸の張力によって交絡点及び下糸が縫製対象物の上面に引き出された縫目を含み、下糸が第1方向に引き出された部分である第1部分と、下糸が第2方向に引き出され且つ少なくとも一部が第1部分と重なる部分である第2部分とが複数組含まれる縫目である第2縫目とが、縫製対象物に交互に配置される(S70,S80、S90)。
(もっと読む)
ミシン

【課題】縫製パターンが既知である場合に対応する縫製パターンを速やかに検索する。
【解決手段】針棒を上下動させる針上下機構と、複数の縫製パターンを記憶する記憶手段と、縫製パターンの縫製点データに従い保持枠を移動させる保持枠制御手段と、保持枠が移動させてパターン特定点を入力する位置入力手段と、入力されたパターン特定点と一致若しくは近似する縫製点データを有する縫製パターンを記憶手段から検索するデータ検索手段とを備えている。
(もっと読む)
ミシン
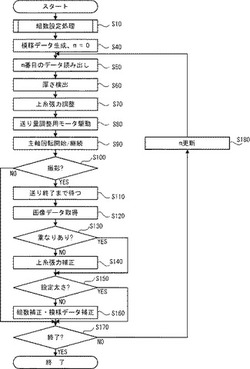
【課題】指定された長さの縫目部をより正確に形成することが可能なミシンを提供すること。
【解決手段】ミシンにおいて、縫製対象物に縫製される所定縫目の少なくとも一部である縫目部の所定方向の長さが取得される(S10)。縫製対象物とともに移動する少なくとも1つの標識が撮影され、画像データが生成される(S80)。少なくとも画像データに基づいて、少なくとも1つの標識の移動量が算出される(S80)。算出された移動量に基づき、所定方向における縫目部の開始点側とは反対側に設定される所定範囲を縫製していると判断される場合に、ミシンモータの回転速度が所定値以下に設定される(S80)。縫目部の所定方向の長さが、指定された長さに達したと判断された場合に(S130:YES)、縫目部の縫製が終了される(S150:YES又はS170)。
(もっと読む)
ミシン
【課題】標識を検出するための撮影対象範囲を適切に設定可能なミシンを提供すること。
【解決手段】刺繍枠をミシン本体に対して移動させる移動機構と、移動機構の駆動を制御する移動制御手段と、撮影手段とを備えたミシンにおいて、刺繍模様を縫製するための刺繍データが取得される(S10)。刺繍枠に保持された縫製対象物に、刺繍模様を縫製可能な範囲である縫製可能範囲が設定される(S30)。縫製対象物に配置される標識に対する、刺繍模様の位置及び角度の少なくともいずれかの設定が基準設定として取得される(S40)。少なくとも縫製可能範囲と、刺繍データと、基準設定とに基づいて、標識が配置されると予想される範囲が撮影手段の撮影対象範囲として特定される(S60)。
(もっと読む)
ミシンおよび刺繍縫製プログラム
【課題】刺繍枠の形状が略矩形形状であって、その角部が円弧状に形成されている場合でも、適正な縫製可能領域を設定可能なミシンおよび刺繍縫製プログラムを提供する。
【解決手段】ミシンでは、刺繍枠を前後方向に移送させることで、プローブの可倒レバーの接触球が刺繍枠と接触する2つのY座標が特定される(S13)。刺繍枠を左右方向に移送させることで、プローブの可倒レバーの接触球が刺繍枠と接触する2つのX座標が特定される(S15)。これらのX座標とY座標とから求められる仮想矩形の対角線方向である4つの移送点が決定される。刺繍枠を各移送点の方向に移送させることで、プローブの可倒レバーの接触球が刺繍枠と接触する4つの座標が特定される(S17)。特定された4つの座標から求められる仮想矩形が縫製可能領域に設定される(S19)。
(もっと読む)
ミシン
【課題】部品について過剰に高精度な寸法精度、部品について過剰に高精度な組付精度が要請されることが軽減される利点が得られるミシンを提供する。
【解決手段】送り歯22が針板29の上面29uよりも下方に退避する退避状態を開始する退避開始タイミングを報知するためのタイミング情報が設定されたタイミング設定部12bと、タイミング設定部12bの退避開始タイミングに関するタイミング情報を検知し、その検知信号を制御部に出力するセンサ14とが設けられている。タイミング設定部12bにおいては、送り歯22が針板29の上面29uよりも下方に退避する退避状態を開始する退避開始タイミングについて、退避開始タイミングを速く検知するように、タイミング情報は前倒しされて設定されている。
(もっと読む)
ミシン
【課題】心地よさおよび温かさを感じさせ得る縫い目が得られるミシンを提供する。
【解決手段】ミシンは、針12を装着可能な針棒11と、送り方向における縫製対象物の送り量と送り方向に直交する方向において縫製対象物に対する針12の相対的な振れ幅量とを制御可能な制御装置とを有する。縫製対象物の縫い目における下手および上手の程度を調整するへたうまモードを実行する指令を制御装置に出力するへたうま選択要素10が設けられている。へたうま選択要素10は、針12の振れ幅量および縫製対象物の送り量をそれぞれ設定値として設定すると共に、振れ幅量および送り量のうちの少なくとも一方を設定値に対してばらつかせる指令を制御装置に出力する。
(もっと読む)
ミシン
【課題】刺繍模様の大きさが撮影手段の撮影範囲を超える場合であっても、刺繍模様の縫製対象物上の配置を、縫製対象物を撮影した画像を利用して確認することができるミシンを提供すること。
【解決手段】ミシンにおいて、針棒と、針板との間に配置された縫製対象物を撮影した画像である撮影画像を表すデータが撮影手段によって生成され、生成されたデータは撮影画像データとして取得される(S110)。縫製対象物に対する刺繍模様の基準点の位置及び刺繍模様の角度の設定を示す標識である設定標識を表すデータが標識データとして生成される(S130)。S110で生成された撮影画像データと、S130で生成された標識データとに基づき、合成画像を表すデータが合成画像データとして生成される(S140)。S140で生成された合成画像データに基づき、合成画像が画面に表示される(S150)。
(もっと読む)
ミシン
【課題】糸切断後の加工布から延びる糸端部の長さを一定にする糸切り機構を提供する。
【解決手段】CPUは、縫製開始か否かを判定し、縫製開始の場合(S1;Yes)、電流値i1の微弱な駆動電流で糸切り用ソレノイドを駆動して(S2)、可動刃を待機位置に保持する。次に、CPUは、実行中の縫製データに基づいて、糸切り指令が入力されたか否かを判定し、糸切り指令が入力された場合(S3;Yes)、糸切り用ソレノイドを待機状態から駆動停止状態に切換える(S4)。
(もっと読む)
ミシン
【課題】被縫製部材を切断する手間をかけず、且つ、無駄にしない。
【解決手段】上下に駆動される針棒2と、針棒2の下端部に取り付けられた縫針3と、針棒2と同軸心上に組付けられ、その軸心回りの回転が自由な回転筒9と、この回転筒9に取り付けられて、縫針3の針元位置へ被縫製部材Tを案内するガイド23aと、回転筒9におけるガイド23aと対向する側に回転筒9と一体に回転可能に取り付けられ、ガイド23aから繰り出された被縫製部材Tを所定の切断位置にて切断する切断装置Sと、切断装置Sにおいて、被縫製部材Tの切断時にガイド23aから繰り出された被縫製部材Tを切断位置に対してガイド23a側で保持する保持機構49a,34aを設ける。保持機構49a,34aは、被縫製部材Tの縫い付け再開時に、縫針3を挟んでガイド23aと対向する位置にて、被縫製部材Tの端部を保持する。
(もっと読む)
穴かがり縫いミシン
【課題】カッタースペースの中心にボタン穴を形成するための針棒の位置の調整を簡易な機構で行うことができる穴かがり縫いミシンを提供する。
【解決手段】支持軸32は、前方に形成した略円筒状の支持台軸部33と、後方に形成した略円筒状のフレーム軸部34とからなる。支持軸32は、支持台軸部33の軸心の中心線と、フレーム軸部34の軸心の中心線とが、互いにずれて形成してある。作業者が支持軸部32を回動させて、支持軸部32の軸心の中心がA1移動すると、針棒支持台31は、針振り機構40によって位置決めされている角コマ45を中心に回動する。針棒支持台31の上端は右側に移動し、角コマ45より下方に位置する縫針11の下端は、作業者が支持軸部32を回動させる前よりもA2だけ左側に位置することになる。従って、作業者は、支持軸32を回動するだけで、針棒支持台31を介して針棒10の位置を調整することができる。
(もっと読む)
ミシン
【課題】上糸保持動作の動作中に主軸の回転速度が急激に変化すると上糸保持装置の上糸の端部の保持量が変化する。
【解決手段】S10において、主軸回転角度AがA3と等しい場合(S10;Yes)、制御装置は、速度変更フラグF1を1にし(S16)、上糸保持用パルスモータの回転角度BがB0と等しいか否かを判定する(S17)。上糸保持用パルスモータの回転角度BがB0と等しい場合(S17;Yes)、制御装置は、ミシンモータの回転速度の変更を禁止する。それ故、主軸は現在の回転速度を維持したままS12へ移行する。一方、上糸保持用パルスモータの回転角度BとB0とが等しくない場合は、(S17;No)、制御装置は、設定値に示す主軸の回転速度になるように、ミシンモータの回転速度を変更することで主軸の回転速度を変更する。
(もっと読む)
ミシン
【課題】押圧されていない状態の縫製対象物の厚みを簡単な操作で検出する機能を備えたミシンを提供すること。
【解決手段】投影手段と、投影手段とは異なる位置に取り付けられた撮影手段とを備えたミシンにおいて、模様を投影するための投影画像が作成される(S40)。S40で作成された投影画像に基づき、模様が縫製対象物に投影される(S50)。S50で投影された模様を撮影した撮影画像が作成される(S60)。S40で作成された投影画像と、S60で作成された撮影画像とに基づいて、縫製対象物の厚みが算出される(S80)。
(もっと読む)
ミシン
【課題】押え足を上下動させる押え足上下動機構を利用して、目飛びの発生を防止する。
【解決手段】押え足上下動機構の駆動を制御する制御手段は、針棒の揺動位置(ステップS2)と、剣先と上糸ループが出合うタイミングにおける針棒の上下位置(ステップS3)とに調時して、押え足を所定高さまで上昇させて(ステップS4)、上糸ループの大きさを変更する。押え足を上昇させる高さを調整することで、剣先が上糸ループを確実捕捉できるように、当該上糸ループの大きさを最適にすることが可能となる。
(もっと読む)
ミシンの布押え装置
【課題】加工布の布厚が変化しても位置決めの微調整を容易に行うことができるミシンの布押え装置を提供すること。
【解決手段】ミシンは、足踏みペダルの踏み込み量をポテンショメータで検出する。制御装置は足踏みペダルの踏み込み量が作動領域であるかを判断する(S28)。足踏みペダルの踏み込み量が作動領域である場合、布押え部材は、押え高さに相当する累積パルス数の演算結果に基づいた高さになる(S30)。作業者は、足踏みペダルを作動領域まで踏み込むことで、踏み込み量に応じて布押え部材の高さを中間位置と布押え位置との間で微調整することができる。
(もっと読む)
ミシン
【課題】布送り方向に沿った布端に沿って適切に縫い目を形成する。
【解決手段】針板14上の被縫製物C1,C2に下方から接して送り動作を行う送り歯1と、被縫製物に上方から接する押さえ足19と、送り歯による送り方向に交差する方向について被縫製物の縫い目に沿った端部の位置を移動調節する端部調節機構と、被縫製物の端部が所定位置にあるか否かを検知する検知手段24,25と、端部調整機構を、検知手段が端部ありと検知した場合に検知手段から離れる方向に移動制御し、検知手段が端部なしと検知した場合には、当該検知状態が継続する時間又は送り距離について定めた閾値を超えるまで端部なしの検知が継続した場合に、被縫製物が検知手段から離れる方向に移動するよう制御を行う制御手段13とを備えている。
(もっと読む)
玉縁縫いミシン
【課題】布地の切断動作を安定して行う。
【解決手段】ミシンモータを駆動源とする針上下動機構と、送りモータを駆動源とする布送り機構と、固定メスに対してメスモータによりセンターメスを上下動させて直線切れ目を形成するメス機構と、被縫製物の搬送速度に応じて定まるセンターメスの上下動頻度に従ってメスモータを制御する動作制御手段とを備え、メスモータの動作速度を検出する検出手段を備え、動作制御手段が、メスモータの指令値に対して検出手段の検出する動作速度が規定値以上の低下を生じた場合に、ミシンモータ及び送りモータを減速させる制御を行うことを特徴とする。
(もっと読む)
上下送りミシン
【課題】布の段部の片倒れを防止する。
【解決手段】布送り方向に沿って、ガイド板20と、上側ローラ7及び下側ローラ3と、上側検出手段25及び下側検出手段24と、送り足2及び送り歯1とが並び、各検出手段の検出結果に基づいて各被縫製物C1,C2の側端部が所定位置となるように各ローラの駆動手段を制御する制御手段13とを備える上下送りミシン100において、制御手段が、各被縫製物の段部Dが各ローラ位置を通過する際に、上側昇降手段による上側ローラの接離移動を繰り返し行わせる動作制御を行っている。
(もっと読む)
打刻データ作成装置及び打刻データ作成プログラム
【課題】刺繍縫製可能なミシンを用いてシート状の被加工物に対する小孔形成動作を実行するための打刻データを作成するものにあって、被加工物に対する所定の模様の描画及び/又は模様の輪郭に沿った被加工物の切断を可能とする打刻データを作成することができ、しかも、模様の描画を行う際の被加工物の破れや、模様の輪郭形状を切断する際の未切断部の発生を効果的に防止する。
【解決手段】針棒ケース7の特定の一部の針棒8に、縫針9に代えて打刻針を装着可能とする。移送機構18のキャリッジ19に、シート状の被加工物を保持する保持体を取付可能とする。制御回路は、打刻データに基づいて、被加工物に対する小孔形成動作を実行させる制御を行う。制御回路は、被加工物に対し複数の小孔により所定の模様を描画するための描画データ、被加工物に対し模様の輪郭に沿って複数の小孔を連続的に形成することにより輪郭を切断するためのカットデータを作成し、更にそれらデータを補正する。
(もっと読む)
ミシン
【課題】表示装置に表示されている刺繍模様画像の倍率にあわせて表示装置に表示されているの移動量を変更することにより、縫製対象となる刺繍模様の配置位置が高精度かつ容易に決定されるミシンを提供する。
【解決手段】液晶ディスプレイ22には、縫製の対象となる刺繍模様に対応する刺繍模様画像が表示される。移動量変更部は、この液晶ディスプレイ上で刺繍模様画像の移動を入力するための移動キーが操作されると、表示倍率設定部で設定された表示倍率Mに応じて液晶ディスプレイ22に表示されている刺繍模様画像の移動量Tを変更する。そして、表示制御部は、この移動量変更部で変更された移動量Tに応じて液晶ディスプレイ22に表示されている刺繍模様画像を移動させる。これにより、液晶ディスプレイ22に表示されている刺繍模様画像は、表示倍率Mに応じて移動キーからの入力に対する移動量Tが増大又は減少する。
(もっと読む)
41 - 60 / 364
[ Back to top ]