
Fターム[3B150JA07]の内容
Fターム[3B150JA07]に分類される特許
21 - 40 / 364
刺繍機
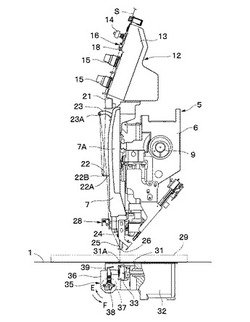
【課題】 糸切れの発生時に、上糸が切れているか、下糸が切れているかを安定して判別することができ、オペレータの負担を軽減できるようにする。
【解決手段】 糸切れセンサ16により糸切れの発生を検出したときに、ジャンプ機構27によりミシン針25のジャンプ制御を行いつつ、主軸9の回転を減速させる。主軸9が基準位置まで回転すると、糸繰出し制御を開始して前記ジャンプ制御を解除し、この状態で上糸掛機構35を作動させて刺繍糸Sの先端側を上糸掛片39に巻き掛けるようにする。下糸切れの場合、天秤23の駆動に伴う刺繍糸Sの繰出しを糸切れセンサ16により検出できる。上糸切れの場合は、上糸掛機構35を用いた刺繍糸Sの繰出しが行われないので、糸切れセンサ16の糸車18が回転することはなく、糸切れセンサ16により上糸切れを検出できる。
(もっと読む)
ミシン及びミシンの制御方法

【課題】主軸と布送り機構を別のモータで駆動する場合に、縫製の速度が変化しても主軸の駆動と布送り機構の駆動の同期を保持できるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、縫針を上下動する主軸を駆動するメインモータと、布を送る布送り機構を駆動する布送りモータを備える。ミシンはメインモータ及び布送りモータの出力軸の回転角を取得する(S11、S13)。ミシンは、メインモータの回転角に対応する布送りモータの出力軸が位置すべき目標回転角を、メインモータの回転角から設定する(S14)。ミシンは、設定した目標回転角と、実際の布送りモータの回転角の偏差を算出する(S15)。ミシンは算出した偏差に基づいて、布送りモータに指示する回転速度を算出する(S16)。
(もっと読む)
ミシン
【課題】布送り機構の水平方向の動作と主軸の回転を別のモータで駆動する場合に、電力供給停止時の不具合の発生を防止することができるミシンを提供する。
【解決手段】ミシンは、縫針を上下動する主軸を駆動するメインモータと、布を送る布送り機構を駆動する布送りモータを備える。ミシンの平滑回路は、メインモータの減速時に生じる回生電力を布送りモータに供給することができる。ミシンは、外部電力の供給がある場合(S11:YES)、メインモータと布送りモータが同期するよう2つのモータを駆動する(S13,S14)。縫製の実行中に外部電力が閾値未満に低下すると(S11:NO)、ミシンは、メインモータと布送りモータの同期を保持しつつ、メインモータの回生電力で布送りモータを駆動し(S23)、2つのモータを停止する(S26)。
(もっと読む)
刺繍ミシン
【課題】刺繍、または、トレースを開始する際の刺繍枠の位置の設定を容易に行えるようにする。
【解決手段】刺繍柄Dの柄データは、刺繍柄Dの複数箇所に設定された所定点P1〜P9のデータと、各所定点P1〜P9からスタート点Sまでのそれぞれの距離データとを含む。刺繍、または、トレースを開始する前に、液晶ディスプレイ9に表示した所定点選択画面にて所定点P1〜P9のうちのいずれか1つを選択し、且つ、枠移動指令用スイッチ10を用いて選択された所定点に対応する位置に刺繍枠5を位置させる。刺繍、または、トレースを開始する時に、選択された所定点からスタート点Sまでの距離データに基づいて、選択された所定点に対応する位置にある刺繍枠5を刺繍柄のスタート点Sに対応する位置へ移動させた後に、該刺繍柄のスタート点Sを起点とする刺繍、または、トレースを開始する。
(もっと読む)
ミシン
【課題】縫製可能領域よりも広い範囲に、複数の模様を縫製する場合、基準模様に対する次の模様の配置を容易に設定することが可能なミシンを提供する。
【解決手段】
仮保持位置処理が選択されると(S65:YES)、基準模様の配置に対する標識の配置が特定される(S67)。次に、第2保持位置で標識の画像データから第2保持位置での標識の配置が検出され後(S78)、第2保持位置での次の模様の配置が設定される(S92)。
(もっと読む)
ミシン、縫目データ作成装置、及び縫目データ作成プログラム
【課題】縫目データに基づいて、上布を下布に縫付ける作業を自動で行うと共に、上布の縫付ける領域を決定することができるミシンを提供する。
【解決手段】ミシン頭部に設けたカメラで、刺繍枠に保持された下布に仮止めされたポケット布の外形を撮影する。撮影された画像データから、ポケット布の外形及び特徴点を算出する。算出された特徴点に基づいて、ポケット布のポケット口以外を縫目形成領域として決定する。決定した縫目形成領域について、ポケット布の外形に沿った縫目データを作成する。作成された縫目データに基づいてミシンで縫製を実行させる。
(もっと読む)
ミシン
【課題】針糸残り長さが短くても、縫針に負荷をかけることなく縫製開始時の糸抜けを防止できるミシンを提供する。
【解決手段】ミシンの使用時において、作業者は布10に生じる「鳥の巣」を軽減する為に針糸残り長さを極力短くする。ミシンの縫い目形成動作により布10の裏側に引き込まれる上糸量は少なくなる。本実施形態のミシンは縫製開始時の布送りの送り量を通常よりも大きくする。上糸8Aの一部が屈曲し、該屈曲部分Qは基準送り量に対してすばやく押え足15の下に潜り混むことが可能となる。上糸8Aは押え足15によって屈曲部分Qが踏まれた状態であるため上糸の布側の抵抗が大きくなり天秤により引き上げられても、糸抜けを確実に防止できる。
(もっと読む)
ミシン
【課題】ミシンベッド上又は加工布上に照射された基準マークの照射位置を、ユーザの所望する位置に容易に移動させることができる使い勝手のよいミシンを提供する。
【解決手段】ミシンの制御装置は、撮影手段により基準マークが撮影された画像に対して、ユーザが前記基準マークを指定して所望の方向に移動させたときの移動方向と移動量を特定する(ステップS23〜S27)。また、制御装置は、特定した移動方向と移動量に対応させて、ミシンベッド上又は加工布上に照射される基準マークの照射位置を移動させるように位置移動手段を制御する(ステップS28、S29)。
(もっと読む)
ミシン
【課題】簡易な構成で送り台の移動原点への位置決めを容易に行う。
【解決手段】上下動する縫針を有し布地を縫製する駆動力伝達機構や針棒上下動機能と、布地を載置する移動体52と、移動体52を直交するX方向とY方向で移動させる布送り装置30と、を備えたミシン1において、布送り装置30は、Y方向に沿った移動体52の移動に対応して複数位置で原点信号を検出するY軸エンコーダ70を備え、Y方向においてY軸エンコーダ70が原点信号を検出する複数位置のいずれか1つを当該Y方向におけるY基準位置に設定し、移動体52が、Y基準位置上でX方向に沿って移動した際に、当該移動体52のX方向におけるX基準位置への到達を検出できるX軸原点センサ71を備える。
(もっと読む)
ミシンシステム、押え足収納装置、及びミシン
【課題】複数種類の押え足を保管すると共に、ユーザが選択した模様の縫製に適した押え足を、間違うことなく取出すことを可能とする。
【解決手段】ミシンベッドに装着される補助テーブル23に、縫製する模様に応じて使い分けられる5種類の押え足13を収納する押え足収納装置3を一体的に組込む。5個の収納室28を並んで備える箱状収容部29の上面に、1つの収納室28を開放させる窓部31aを有するカバー部材31を、駆動モータ等により移動可能に設ける。ミシンの制御装置は、ユーザにより模様が選択されると、その模様の縫製に適した押え足13が収納されている収納室28を決定し、当該収納室28の上方に窓部31aを移動させるように開閉機構30を制御する。
(もっと読む)
ミシン
【課題】刺繍枠の内側に設定される縫製可能領域よりも広い範囲に複数の模様を縫製する場合の各模様の配置を設定する際の利便性を向上させたミシンを提供すること。
【解決手段】基準模様の配置に対する次の模様の相対的な配置が決定され(S70)。保持位置が第1保持位置から第2保持位置に変更される前後のそれぞれで、刺繍枠に保持された縫製対象物の表面に配置された標識を撮影した画像データが取得される(S76)。画像データに基づき、保持位置が第1保持位置である場合と、保持位置が第2保持位置にある場合とで、標識の配置が検出される(S78)。保持位置が第2保持位置である状態で刺繍枠に保持された縫製対象物上の基準模様の配置が特定される(S90)。保持位置が第2保持位置である状態で刺繍枠に保持された縫製対象物に対する次の模様の配置が設定される(S92)。
(もっと読む)
ミシン
【課題】ヒッチステッチを防止する。
【解決手段】針棒12の中心線C回りに回動可能な回動台43と、回動モータ463と、ミシンモータ21から釜13に動力を伝える入力軸41及び出力軸42と、軸間の位相差を変更調節する差動伝達機構40とを備え、差動伝達機構は、中心線上に入力軸と出力軸を配置し、その回りを回動可能な支持枠441と、支持枠に対して回動可能であって、軸間で互いに逆に回転を伝達する伝達体445とを備え、支持枠に設けられた第一の従動部材461と、回動台に設けられた第二の従動部材462と、第一の従動部材に回動を付与する第一の主動部材464と、第二の従動部材に回動を付与する第二の主動部材465とを有し、第一の主動部材から第一の従動部材への回転伝達量を第二の主動部材から第二の従動部材への回転伝達量の二分の一とし、第一の主動部材と第二の主動部材とが同時回転を行うように同一軸上に固定装備した。
(もっと読む)
ミシン
【課題】ミシンの所定の給脂箇所に給脂が必要な時期が近づいたこと、あるいは、給脂が必要な時期となったことを、使用者に精度よく知らせる。
【解決手段】上下動する縫針を有し布地を縫製するための駆動機構を備えたミシンにおいて、布地の移動量を積算するステップSS140の手順と、模様縫いミシン1の給脂箇所である2対のスライドベアリング51,60に対する給脂に関する報知を行う表示部7aと、ステップSS140の手順が積算した移動量に応じて、表示部7aの制御を行う処理とを有する。
(もっと読む)
三巻縫い装置及び三巻縫い方法
【課題】布地の端縁を高い精度で3枚重ねして三巻縫いすることができ、作業性に優れている。布地の端縁を折返し幅が等しい完全な三巻状態で縫製して三巻部分の厚さを均一にして製品品質を向上する。布地の表側から三巻縫いすることができ、製品の外観を良好にする。
【解決手段】テーブル本体11の一方側にて第2折返し板19上に載置され、かつ第1折返し板15上に対して端縁が第1及び第2支持板13・17間の幅で位置出しされた状態で載置され、吸引手段21による吸引により第1支持板13の先端に沿って折り目が形成された状態でセットされた布地端縁を、第2折返し板19側へ移動する第1折返し板15により上記折り目にて折返した後に、該状態にて第2折返し板19を第1折返し板15側へ移動して3枚重ね状態に折返して仮三巻状態に形成し、該状態で布地移送手段により移送される布地の仮三巻部分をミシンにより直線縫いして三巻縫いする。
(もっと読む)
カッターシャツ用カフス地縫い装置
【課題】形状が異なる多種類のカフスを縫製する場合であって、ある程度のサイズ幅で共通の部材を使用してカフスを縫製することができ、設備コストを低減する。異なるサイズ、形状のカフスへ縫製を切換える場合であっても、二次元方向に対するカフス地の移動量を制御することにより多種類のカフスを縫製することができる。カフスを取出して集積することができ、カフスの縫製及び集積の作業時間を短縮する。
【解決手段】回動位置保持部材63により押え板65の回動を規制した状態でカフス地縫送手段7及びカフス地移送手段のいずれか一方を移動制御して縫製位置へ移送されたカフス地を直線状に縫製及び切断する一方、回動位置保持部材63による押え板65の回動規制を解除すると共に軸部材を押え板65の凹部65aに係合した状態でカフス地縫送手段7及びカフス地移送手段を移動制御して縫製位置へ移送されたカフス地の角部を湾曲状に縫製及び切断する。
(もっと読む)
ミシンおよび縫製物品管理プログラム
【課題】ミシンによる縫製の準備段階で、縫製に必要な縫製物品が揃っているか否かをユーザが容易に確認することを可能とするミシンおよび縫製物品管理プログラムを提供する。
【解決手段】ユーザが所望の模様をミシンのタッチパネルを介して選択すると(S21:YES)、選択された模様の縫製に必要な必要物品の物品情報が取得され(S23)、必要物品リストに追加される(S25)。必要物品リストが、ミシンのタグリーダによって通信範囲内にある準備済み物品に装着された無線タグから読み取られた情報に基づいて作成された準備済み物品リストと比較され(S27)、必要物品のうち、準備済み物品に含まれていない不足物品があれば(S28:NO)、不足物品に関する情報をユーザに報知するための不足物品報知画面が液晶ディスプレイに表示される(S29)。
(もっと読む)
ミシン用ステッピングモータ制御装置及びミシン
【課題】ミシンに使用されるステッピングモータの消費電力を低減すること。
【解決手段】ミシン用ステッピングモータ制御装置1は、偏差生成部40と、駆動信号生成部41と、ゲイン調整部43と、を含む。偏差生成部40は、ステッピングモータ30に対する電流指令値Icとステッピングモータ30に流れる駆動電流値Idとの偏差dを求め、偏差dに所定のゲインGを与えた電流値偏差Dを生成する。駆動信号生成部41は、電流値偏差Dから駆動信号Sdを生成する。コイル34a、34bの自己誘導によって流れる電流をコイル34a、34b自体に還流するように駆動回路が制御される省電力制御が行われる場合において、駆動電流値Idの絶対値を減少させる必要があるときには、駆動電流値Idの絶対値を減少させる必要がないときよりもゲインGを大きくする。
(もっと読む)
ミシン
【課題】イサリ量を低減する。
【解決手段】搬送される上布CUと下布CDの終端部をそれぞれ検出する上布と下布の検出手段91、81と、送られる上布のみを押圧する上布送り調節機構9と、送られる下布のみに押圧力を付与する下布送り調節機構5と、布送り機構の送り量と各検出手段の検出タイミングとによりイサリ量を算出する終端部位置算出部51と、イサリ量とそのイサリ量を生じた時の上布と下布の押圧力の差とを対応づけて記録する記録部54と、記録部の二以上の縫製によるイサリ量と上布と下布の押圧力の差との記録から適正な上布と下布の押圧力の差を求め、それ以降の縫製時に適正な上布と下布の押圧力の差を生じるように上布送り調節機構又は下布送り調節機構とを制御する調節制御部51とを備えている。
(もっと読む)
ミシン及びミシンの制御方法
【課題】縫製作業を開始することなく上糸に付加する張力の確認を行うことができるミシン及びミシンの制御装置を提供する。
【解決手段】CPUは、足踏みペダルの位置が踏み返し位置(Pb1)以上踏み返された位置である駆動領域に属するか否かを判断する(S90)。踏み返し位置(Pb1)は、縫製動作のために作業者が足踏みペダルを中立位置(Pn)から踏み込み位置(Pf2)へ操作する方向と異なる方向に設けた位置である。駆動領域に属する場合、CPUは、布押え部材の押え位置への移動を禁止し(S170)、糸調子ソレノイドをONにして上糸に張力を付加する(S180)。作業者は、上糸張力を確認することができる。
(もっと読む)
ミシンのボビン交換装置
【課題】ボビン交換操作に際して適切な誤動作対策を講じた、あるいは確実なボビンケースの受け渡しを可能にする。
【解決手段】ボビン把持装置が把持しているボビンケースをボビンストック部の所定のボビン交換位置のボビン保持部に渡すとき、検出手段により該所定のボビン交換位置のボビン保持部にボビンが保持されていることを検出したならば、搬送機構によるボビン把持装置のボビンストック部に向けての移動を中止させる、他方、ボビンストック部の所定のボビン交換位置のボビン保持部にボビン把持装置がボビンケースを取りに行くとき、検出手段により該所定のボビン交換位置のボビン保持部にボビンが保持されていないことを検出したならば、搬送機構によるボビン把持装置のボビンストック部に向けての移動を中止させる。
(もっと読む)
21 - 40 / 364
[ Back to top ]