
Fターム[3C007AS14]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 検査、点検、測定 (74)
Fターム[3C007AS14]に分類される特許
1 - 20 / 74
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
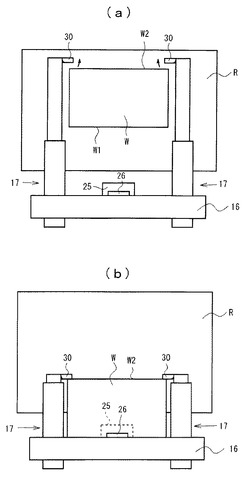
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム

【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
移動ロボット
【課題】従来の移動ロボットにあっては、毛状体束を振動させてその復元力を推進力とするものでは、移動速度が遅くて増速が困難であり、回転体の回転力を推進力とするものでは、装置構造が複雑になるという問題点があった。
【解決手段】前後に縦列配置した前方胴部1及び後方胴部2と、前方胴部1及び後方胴部2を互いに近接離間させるための推進力付与手段3を備え、前方胴部1及び後方胴部2の外周面に、弾力性を有し且つ後方へ傾斜した多数の推進用外毛4を備えている移動ロボットR1としたことにより、移動速度の制御を容易にし、装置構造の簡略化を実現した。
(もっと読む)
マニピュレータ及びマニピュレータの制御方法
【課題】本発明は、小型な駆動部を有するマニピュレータを、または複数の構造物が存在する狭隘部へマニピュレータを挿入にできるマニピュレータの制御方法を提供することである。
【解決手段】本発明は、上記目的を達成するために、少なくとも一つの駆動部と、前記駆動部に接続する少なくとも一つのリンクとを備えるマニピュレータの前記駆動部の姿勢角を検出し、前記姿勢角から前記マニピュレータの手先の位置および姿勢を算出するマニピュレータまたはマニピュレータの制御方法において、前記姿勢角の検出は前記リンクの駆動軸またはその延長線が前記姿勢検出器の検出軸とが一致するように設けられた前記姿勢検出器によって行なうことを第1の特徴とする。
(もっと読む)
組立検査装置及びこれを用いた組立処理装置
【課題】組付受部品に組付部品を組付けるに当たり、組立後の組付部品の組付け状態を容易且つ正確に検査する。
【解決手段】組付受部品1に組み付けられる組付部品2の一部に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、組付受部品1に組み付けられた組付部品2に対向配置されて前記認識表示体12を撮像する撮像具5と、この撮像具5にて撮像された認識表示体12の撮像情報を少なくとも用い、組付受部品1に組み付けられた後の組付部品2の位置及び姿勢に関する配置情報を認識する配置情報認識部6と、この配置情報認識部6にて認識された配置情報に基づいて良好な組付状態の組立であるか否かを検査する組立検査部7と、を備える。これを用いた組立処理装置も対象とする。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】通常のティーチング以外の動作を行わずとも、カメラとワークとの位置関係を維持しながら撮像対象物の姿勢を変更できるロボットの制御装置を提供する。
【解決手段】ティーチング時に、ロボットの手先座標である制御履歴とカメラが撮像した画像のデータを対応させて連続的に記憶する(S11〜S16)。姿勢変更指示が与えられるとワークの画像データを移動先画像,その画像の中心を注視点,ロボットの手先座標を移動先座標,制御履歴中で手先のカメラから見て奥行き方向の位置と向きが移動先座標と同じものを移動元座標,移動元座標に対応する履歴画像を移動元画像に夫々設定する。移動元及び移動先座標からワークの注視点移動距離を求め、移動先画像と移動元画像間でのワーク上注視点の画像上の位置ずれを画像注視点移動距離とし、各距離と像面距離から三角測量法で求めた注視点距離を維持したまま与えられた方向及び速度だけワークを回転させる。
(もっと読む)
管内移動装置
【課題】管体の内部形状が変化しても円滑に移動可能な管内移動装置を提供する。
【解決手段】可撓性の長手部材5が螺旋状に複数ターン巻回されてなる螺旋体2と、螺旋体2の軸心方向への推進力を発生する推進機構7と、を備え、推進機構7は、長手部材5の延在方向に沿って分散配置された複数の駆動力発生部10の夫々に備えられた複数の駆動機構3を備え、複数の駆動機構3の夫々は、対応する駆動力発生部10において、螺旋体2の軸心直交方向に対して傾いた方向に駆動力を働かせて推進力を発生するとともに、駆動力の作用方向を調整可能に構成されている。
(もっと読む)
試験装置、試験システム及び試験方法
【課題】実際の動作状況に近い環境で人手を介さずに試験を行う。
【解決手段】試験装置1の記憶手段1aには、予め、対象装置3の操作部3aが生成する操作データと、機械部3bの動作終了を待つ一時停止指令と、を記録した操作情報が記憶される。試験装置1では、操作情報を時系列に読み出し、操作データを読み出したときは操作データ出力手段1cが、操作データを対象装置3に出力する。一時停止指令を読み出したときは、同期手段1dが、ロボット2から動作終了の通知を受けるまで、操作データ出力手段1cによる操作データの出力を停止させる。
(もっと読む)
天井内モニタリングロボットシステム
【課題】天井内のモニタリングを行う際に、ロボットが転倒することなくモニタリングを続行することができ、天井内の観察とロボットの捕捉を容易にすることが可能なロボットシステムを提供する。
【解決手段】天井内を走行可能な自走式ロボットが、走行制御機構と、可動式のカメラと、姿勢センサとを有する。天井点検口の付近に可動式の補助カメラを設置し、ロボットと補助カメラとの間で無線通信可能なコンピュータを備える。コンピュータがロボットと補助カメラからのデータを受信し、ロボットの走行制御機構に信号を送信して所定の向きと方向へと移動させる。姿勢センサが検出した傾斜角が第1の設定値に達するとコンピュータから走行制御機構に減速信号が送信され、第2の設定値に達すると停止信号が送信される。コンピュータのモニター画面にカメラが撮影した画像と補助カメラが撮影した画像とが概ね同時に表示される。
(もっと読む)
つかみ装置
【課題】リークテストの時間短縮を図ることを目的とする。
【解決手段】弾性体からなるチューブ3の内側に硬質基体2が挿通され、硬質基体2の外周面にチューブ3の両端がそれぞれ全周に亘って固定されてチューブ3の内側が密閉されており、硬質基体2の軸方向一端部26に給排気口20が形成され、硬質基体2に、給排気口20とチューブ3の内側とを連通する第一空気通路21が形成されており、第一空気通路21を通ってチューブ3の内側にエアが流入することでチューブ3が膨張するつかみ装置1において、硬質基体2に、硬質基体2の軸方向一端部26から軸方向他端部25まで延在してチューブ3の軸方向他方側に向けて開口した第二空気通路24が複数形成されている。
(もっと読む)
形状測定装置
【課題】測定者の操作に応じて関節部の回転動作を補助するように構成された形状測定装置を提供する。
【解決手段】形状測定装置100は、光学式センサ40により被測定物体51を非接触で走査して当該被測定物体51の形状の測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bの各々に設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bに設けられ、当該関節部11bにより接続された一方のアーム部11a若しくはプローブ12を他方のアーム部11aに対して回転駆動させる駆動部15と、角度情報からプローブ12の移動を検出して駆動部15を作動させる制御部20と、を有する。
(もっと読む)
電子部品把持装置及び電子部品検査装置
【課題】電子部品を載置するトレイなどの高さを適宜自動的に測定することのできる電子部品把持装置及び電子部品検査装置を提供する。
【解決手段】供給側ロボットハンドユニット20は、電荷を拡散させる材料からなるトレイに載置されたICチップを把持部32を当接させて把持する当接装置20Aと、当接装置20Aをトレイに対して上下方向に駆動制御する制御手段とを備える。把持部32は当接装置20Aにて独立した導電性を有するとともに、電荷の拡散に基づいて電荷を拡散させる部材との当接を検出する当接検出装置40が接続され、制御手段は、電荷を付与された把持部32をトレイに下降させ、把持部32のトレイへの当接を検出したとき、把持部32の上下方向の位置を測定する。
(もっと読む)
ロボットの制御装置及びロボットのティーチング方法
【課題】ロボットをティーチングする際に並行して撮像対象物までの距離計測を行うロボットの制御装置を提供する。
【解決手段】初期位置で撮像される画像フレームの中心周りで注視領域を設定し、初期位置の座標を移動元座標とする。入力された移動方向に対し、注視領域が撮像フレームに収まるようカメラを上記移動方向にTB(ベクトル)だけ微小移動させ、移動元座標,移動先座標(移動後の座標)からカメラの移動距離TC(ベクトル)を計算し、移動先座標,移動元座標で夫々捉えた画像から注視領域の移動距離を求めてカメラ間視差とし、カメラの焦点距離,移動距離,視差から三角測量法で移動元座標から注視点Pcまでの撮像距離を求め、入力された移動方向と撮像距離とから移動先座標を始点,撮像距離を半径としてカメラが注視点方向を常に向いた状態での目標円弧軌道を計算し、カメラを前記軌道に沿って移動させるようロボットに指令を出力する。
(もっと読む)
屈曲機構とその制御装置および制御方法
【課題】狭隘部や複雑形状部において、重量のある作業装置を任意の位置および姿勢へ移動するための屈曲機構を提供する。
【解決手段】本発明の屈曲機構は、2つの剛体と該剛体間を接続する駆動部と、該駆動部を制御する制御装置を備え、該制御装置は、動作時に該剛体の相互の位置関係を固定し保持する動作時固定手段と、非動作時に該剛体の相互の位置関係を固定しない非動作時開放手段を有することを特徴とする。また、球体の回転静止時に、電磁石を磁化することで球体との間に引力を発生し、互いに接着することで、保持トルクを増加させる。
(もっと読む)
計測システム
【課題】1台の計測装置で複数の計測対象を計測可能とし、かつ、計測対象の絶対位置を精度良く計測することを可能とする。
【解決手段】 この計測システムは、計測対象38までの距離と方向を計測する計測装置34と、計測装置が取付けられているロボット装置(20,32)と、計測対象の近傍に設置されている絶対位置が既知の参照計測対象36と、計測装置34とロボット装置(20,32)を制御すると共に、計測結果から計測対象38の絶対位置を演算する制御装置12を備えている。制御装置12は、参照計測対象36までの距離と方向を計測するキャリブレーション工程と、計測対象38までの距離と方向を計測する計測工程と、を実施する。
(もっと読む)
ハンドリング装置および電子部品検査システム
【課題】安定かつ高速に電子部品を渡すことができるハンドリング装置および電子部品検査システムを提供する。
【解決手段】昇降装置23は、電子部品を吸着した吸着部215を搬送位置から受け渡し位置に移動させる際、搬送位置からこの搬送位置と受け渡し位置との間の切り替え位置で押圧部235を減速する。これにより、電子部品を渡す直前には切り替え位置よりも低速で電子部品を移動させて受け渡し位置での衝撃を軽減するので、電子部品が破損するのを防ぐことができる。また、電子部品の移動に要する時間を所定の値にできるとともに、切り替え位置までは高速で電子部品を移動させることにより移動に要する時間を短縮することができる。結果として、より安定かつ高速に電子部品を渡すことができる。
(もっと読む)
生産装置及び生産システム
【課題】投入搬出口から作業室内に搬入された作業ユニットを装置内で容易に移動させること。
【解決手段】箱状の装置本体と、装置本体を下側の作業準備室2と上側の作業室とに仕切る平板状の隔壁部材と、作業準備室の内部から隔壁部材の位置まで昇降可能な可動床部8と、作業準備室内に設けられ可動床部を昇降させる昇降機構と、可動床部に対して着脱可能に設けられ作業を行う作業ユニットと、作業ユニットを作業準備室内に対して出し入れするために、作業準備室を外部と仕切る側壁部2a、2b、2c、2dに設けられた投入排出口22と、作業準備室内において、投入排出口と昇降機構によって下降された可動床部との間の平面領域内で、作業ユニットの下面に駆動力を付勢して作業ユニットを少なくとも2方向に搬送する搬送機構24と、ワークに対して作業を行う2基のアーム部を有し隔壁部材上に設けられた作業ロボットと、を備える生産装置を提供する。
(もっと読む)
調芯治具
【課題】 必要に応じて調芯機構を簡便にロックできる調芯治具を実現する。
【解決手段】 調芯治具は、ツールを保持するガイド部材と、ガイド部材と同軸に配置されており、そのガイド部材を複数の球体によって軸直方向に移動可能に支持する調芯機構を備えている。調芯機構には、前記複数の球体に対して軸方向に進退可能な押圧部材と、加圧又は減圧されることによって前記押圧部材を前記複数の球体に圧接させる作動室が設けられている。この調芯治具によると、作動室を加圧又は減圧することによって調芯機構をロックし、作動室を大気開放することによって調芯機構のロックを解除することができる。
(もっと読む)
生産装置
【課題】生産装置において、装置内で複数のワークに対して、例えば、加工、計測、調整、組立等の種々の作業を行うことができ、装置単体で多種多様な製品の生産が可能となるようにする。
【解決手段】ワークWに対して作業を行う生産装置100であって、箱状の装置本体1と、装置本体1を下側の作業準備室4と、上側の作業室3とに仕切る平板状の床部5と、作業室3を床部5上で外部から隔離するクリーンカバー6と、作業準備室4の内部から床部5の位置まで昇降可能なユニット固定部21と、作業準備室4内に設けられ、ユニット固定部21を昇降させる昇降機構と、作業室3内に設けられ、作業室3内でワークWを含む被移動物を移動させる多関節ロボット10R、10Lを有するマニピュレータ9とを備える。
(もっと読む)
1 - 20 / 74
[ Back to top ]