
Fターム[3C007BS28]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 親子型 (33)
Fターム[3C007BS28]に分類される特許
1 - 20 / 33
吸着装置及びロボットシステム
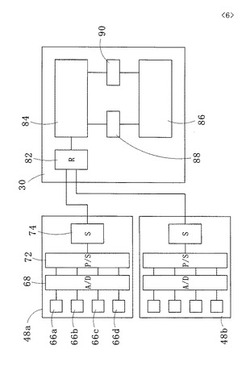
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
ロボットおよび補間方法

【課題】ロボットを構成する2つの制御ユニットA,Bにおいて、制御ユニットBが制御ユニットA上に設置されている場合に、両方の制御ユニットを同時に動かしながら、制御ユニットBの制御点に対して所望の補間動作ができるようにする。
【解決手段】制御ユニットBのユニットコントローラBに対して、制御ユニットAの制御点ACに対する指令Aも与える。ユニットコントローラBは、指令Aを制御周期ごとに補間計算し、制御ユニットBのユニット座標系Bにおける制御点BCの補間位置を計算することで、制御ユニットBのアクチュエータの補間位置を計算し、アクチュエータを制御するという手順で処理する。
(もっと読む)
移送ロボット
【課題】本発明は、2組のリンク機構から構成された、昇降機構において、リンクへの負荷を軽減する機構を提供する。
【解決手段】搬送物を載置するハンド部と、前記ハンド部と連結され少なくとも2つ以上の回転関節を備え前記ハンド部を一方向に移動するように伸縮し旋回軸方向に対向するように配置された2組の水平アームからなる水平アーム機構30と、前記水平アーム機構30の支持ベース8に連結され水平アーム機構30を昇降する少なくとも2組のリンク機構から構成される昇降機構20と、から構成され、前記支持ベース8と前記昇降機構20の第3関節部8bとの間には水平アーム機構30をX方向に移動自在に支持する直動機構が配置されたものである。
(もっと読む)
基板搬送ロボット
【課題】大重量の基板を高い信頼性で搬送できる基板搬送ロボットを提供する。
【解決手段】本ロボットは、それぞれが基板を保持する第1及び第2基板保持部11,12を有し、さらに、第1及び第2基板保持部11,12が装着された第1及び第2アーム機構13,14を備える。第1アーム機構13は、主旋回軸を含む平面に関して互いに対称に配置された一対の第1アーム19を有し、第1アーム19のそれぞれが、その中間部にて内向きに折曲可能に構成されている。第2アーム機構14は、主旋回軸を含む平面に関して互いに対称に配置された一対の第2アーム20を有し、第2アーム10のそれぞれが、その中間部にて外向きに折曲可能に構成されている。
(もっと読む)
加工ロボットシステム
【課題】流体圧シリンダ装置を介して加工工具とワークとを押し付けながら加工を行う加工ロボットシステムにおいて、過負荷を防止するとともに加工の品質及び信頼性を向上させる。
【解決手段】加工ロボットシステム102は、ロボット手先部16に支持された加工工具92に加わる力及びモーメントを検出する力覚センサ90と、所定の制御パラメータに従ってロボット14及び流体圧シリンダ装置22を制御するシステム制御装置100とを備える。システム制御装置は、力覚センサの検出データに基づいて、倣い作業中に加工工具とワークとの間に作用している作用力を算出し、作用力に応じて手先部の目標軌道、目標移動速度及び流体圧シリンダ装置の目標押圧力を調整する。また、流体圧シリンダ装置が変位させる物体に作用する重力及び慣性力が流体圧シリンダ装置に及ぼしているシリンダ影響力を算出し、シリンダ影響力を補償するように目標押圧力を調整する。
(もっと読む)
医療用ロボットシステム
【課題】本発明は、支持する器官の形状の個人差等に対応することができ、しかも部品点数の増加を抑えることができる医療用マニピュレータを備えた医療用ロボットシステムを提供する。
【解決手段】ロボットアーム24と、ロボットアーム24に着脱自在に設けられ、子宮Aを所定の位置に支持するための子宮マニピュレータ34と、ロボットアーム24及び子宮マニピュレータ34を操作するコンソール26と、を備えた医療用ロボットシステム10であって、子宮マニピュレータ34は、基部58に設けられた第1アーム部60と、第1アーム部60よりも先端側に位置して子宮Aを保持する第2アーム部64と、第1アーム部60と第2アーム部64とを連結し、かつ第1アーム部60に対する第2アーム部64の向きを可変可能な連結部68とを備え、第2アーム部64は、長手方向に伸縮可能に形成されている。
(もっと読む)
多自由度ロボット装置
【課題】本発明は、大きいトルクを伝達できるパラレルアーム機構を構成するとともにシリアルアーム機構と組み合わせ、広い可動範囲で高速高精度に重い物を搬送することができる多自由度ロボット装置を提供する。
【解決手段】パラレルアーム機構100と、シリアルアーム機構200を備えた多自由度ロボット装置であって、前記パラレルアーム機構100に備えられた可動プレート2の支持台に前記シリアルアーム機構200が備えられ構成されたものである。
(もっと読む)
計測システム
【課題】1台の計測装置で複数の計測対象を計測可能とし、かつ、計測対象の絶対位置を精度良く計測することを可能とする。
【解決手段】 この計測システムは、計測対象38までの距離と方向を計測する計測装置34と、計測装置が取付けられているロボット装置(20,32)と、計測対象の近傍に設置されている絶対位置が既知の参照計測対象36と、計測装置34とロボット装置(20,32)を制御すると共に、計測結果から計測対象38の絶対位置を演算する制御装置12を備えている。制御装置12は、参照計測対象36までの距離と方向を計測するキャリブレーション工程と、計測対象38までの距離と方向を計測する計測工程と、を実施する。
(もっと読む)
多関節ロボットおよびそれを用いたロボットシステム
【課題】本発明は、空間的に自由に移動することができる旋回ユニット搭載ロボットを用い、軽量化され密集配置に適した多関節ロボットおよびそれを用いたロボットシステム提供する。
【解決手段】水平面内を旋回するリンク機構5の先端に3次元空間を自在に移動可能なロボット1を備えた多関節ロボットであって、前記ロボット1が双腕ロボット1から構成されるものである。
(もっと読む)
移送ロボットの制御方法
【課題】本発明は、比較的小さな設置面積に配置でき、上下への昇降範囲が広くできるとともに、安全にワークを移送することが可能な移送ロボットを提供する。
【解決手段】搬送物を載置するハンド部14と、前記ハンド部14を一方向に移動させる水平アーム機構30と、前記水平アーム機構30を上下に移動する昇降機構20を備えた移送ロボットにおいて、前記昇降機構20が、ベース部材2に備えられた少なくとも2組のリンク機構から構成され、2組のリンク機構の第2関節部6が互いに内側になるように動作させながら、ハンド部14のローリング方向、横ずれ動作、ヨーイング方向の動作を行なう。
(もっと読む)
移送ロボットおよび移送ロボットの制御方法
【課題】本発明は、比較的小さな設置面積に配置でき、上下への昇降範囲が広くできるとともに、安全にワークを移送することが可能な移送ロボットを提供する。
【解決手段】搬送物を載置するハンド部14と、前記ハンド部14を一方向に移動させるアーム機構30と、アーム機構30を上下に移動する昇降機構20を備えた移送ロボットにおいて、前記昇降機構20が、ベース部材2に備えられた少なくとも2組のリンク機構から構成され、リンク機構の関節軸の方向がハンド部14の移動方向と同じとなるよう配置し、ハンド部14が2組のリンク機構の間で昇降するよう動作させる。また、ハンド部14のローリング方向、横ずれ動作などを行なう。
(もっと読む)
搬送システム及び自動化製造システム
【課題】
従来の自動化製造システムでは、ガントリ形の水平・垂直移動装置と多関節形ロボットを同時に動かしている。ガントリ形の水平・垂直移動装置の移動速度は多関節形ロボットの移動速度よりも非常に遅く,これら2つを組み合わせて同時に動かすと,遅い方のガントリ形の水平・垂直移動装置の移動速度により全体の搬送速度が決まってしまうという問題がある。
【解決手段】
搬送システム50は被搬送物であるHDD100を搬送するために、垂直移動と水平移動ができるガントリ52と、ガントリ52に設置されたロボットハンドラ62が手先についた多関節形ロボット60を有する。多関節形ロボット60の現在位置における作業範囲内で、取り出し、搬送、設置の一連の搬送作業が行えるHDD100を優先して選択し、前記作業範囲内での搬送作業においては、ガントリ52を動かさず、多関節形ロボット60で搬送する。
(もっと読む)
マニピュレータシステム
【課題】コンパクト化に適した無軌道方式でありながら、自走台車のような動作のタクトタイムのや移動位置制御の煩雑性の問題を回避し、広範囲で正確性と迅速性の高いワーク搬送やアクセス位置への移動等を、ロースペックで実現すること。
【解決手段】周辺装置7A〜7E等が配置されたエリア3の周辺に、周辺装置7A〜7E等に対する相対位置が固定されたベース9を配置する。外力の付加によりエリア3の床面3A上を走行移動する従動台車11とベース9との間に、パラレルリンク機構によるマクロマニピュレータ13を架設する。マクロマニピュレータ13により従動台車11を床面3A上で各周辺装置7A〜7E間に走行移動させて、従動台車11に設置された多関節型のマイクロマニピュレータ15を各周辺装置7A〜7E等にアクセスさせ、あるいは、マイクロマニピュレータ15により仕掛品5を移動させる。
(もっと読む)
ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】省スペース化と高スループット化を図ったウェーハ搬送ロボットを提供する。
【解決手段】昇降可能な支持台200と、支持台上に一端が軸支され水平方向に旋回可能な第1アーム部201と、その他端部上に一端が軸支され水平方向に旋回可能な第2アーム部202と、第1アーム内に設けられ、第1及び第2アームを旋回させアームの最大移動範囲内の任意の位置に停止させるアーム駆動機構221,222とで構成される水平多関節ロボット220と、第2アーム部の先端上に軸支され、水平方向に旋回可能な互いに対称的に配置された2つの機械式リンクアーム241,242と、その先端にそれぞれ設けられウェーハを保持するエンドエフェクタ208,209とを有する水平多関節機械式ダブルリンクアーム240とを備え、機械式リンクアームを旋回させる旋回機構が前記第2アームの内部に設けられ、エンドエフェクタは、互いに間隔をおいて上下に配置した。
(もっと読む)
遠隔作業装置
【課題】広範囲の作業も容易に行える遊泳移動型の遠隔作業装置が持つ作業性と、反力を伴う作業や正確な位置決めが必要となる作業も容易に行える設置型の遠隔作業装置が持つ作業性の下で、設備の予防保全作業を行える遠隔作業装置を提供すること。
【解決手段】本発明では、遠隔制御を受けて、発電プラントその他の設備の予防保全作業を行う遠隔作業装置において、作業具5を保持する先端作業部202とこの先端作業部202の位置決め操作を行う多関節のアーム部203とを有するロボットアーム2と、設備の構造間に架け渡される架橋体を成してロボットアーム2を支持し、この架け渡し方向を軸とする旋回方向、この架け渡し方向に沿う方向、この架け渡し方向の軸から遠ざかる方向およびこの軸に近づく方向の各方向にロボットアーム2を変位させるロボットアーム設置体3と、ロボットアーム2とロボットアーム設置体3とを着脱可能に連結するロボットアーム着脱機構4とを備えるようにした。
(もっと読む)
オフライン教示データの作成方法及びロボットシステム
【課題】ロボット、特に当該ロボットを搭載したスライダの適切な教示データを自動的かつ効率的に作成する。
【解決手段】ロボットの据付ベースを移動させるスライダを動作させながらワークに対して連続した作業を行なうロボットシステムにおいてスライダ位置を決定する方法は、初期位置等を設定するステップ(S100〜S103)と、ロボット原点を通る探索平面内にて離散的に設定された格子点が、ワーク上の作業位置に合致するようにスライダの位置を設定して、そのスライダの位置における各格子点の評価値を算出するステップ(S106)と、評価値が最高値である格子点が溶接点になるように、スライダの位置を決定するステップ(S109)とを含む。探索平面は作業位置を中心として回転させることで、最適なスライダの位置を設定できる。
(もっと読む)
パラレルメカニズム
【課題】 パラレルメカニズムの動作速度を低下させることなく、エンドエフェクタの動作範囲を拡大することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた電動モータ21に一端が接続され、他端がブラケット14に回転可能に支持され、電動モータ21によって回転駆動される旋回軸20と、該旋回軸20の他端に取り付けられ、旋回軸20の回転運動をベース部2の取付面2aに対して垂直な方向への直線運動に変換するエンドエフェクタ駆動機構30とを備える。エンドエフェクタ駆動機構30は、旋回軸20の他端に取り付けられたウォーム41と、該ウォーム41と噛合する一対のウォームホイール42,43と、該一対のウォームホイール42,43それぞれの軸部に連結され、ウォームホイール42,43の回転運動を直線運動に変換する閉リンク44とを有する。
(もっと読む)
ロボットのダイレクトティーチ制御装置
【課題】作業者がロボットと直動外部軸との間で制御対象を簡単且つ迅速に切換えれるようにする。
【解決手段】マスターコントローラ16は、第1の閾値以上の大きさを持つ外力が第1の規定時間以内で消滅する信号波形を一定時間以内に2回にわたって判定すると、ロボット1及び直動外部軸11のうち現在の制御対象としている一方を制御対象外とすると共に現在の制御対象外としている他方を制御対象として切換え、第2の閾値以上の大きさを持つ外力が第2の規定時間以上にわたって継続する信号波形を判定すると、その第2の閾値以上の大きさを持つ外力が力学センサ10に付与されている期間において現在の制御対象に対してダイレクトティーチ制御を行う。
(もっと読む)
折り畳み式ロボットアームを備えたロボットシステム
システムはエンドエフェクタ(110)、エンドエフェクタ(110)を方向付けするためのロボット手首(120);及びエンドエフェクタを位置決めするためのロボットアーム(130)を含む。ロボットアーム(130)は、スタック状に折り畳み可能である。ロボット手首(120)はロボットアームの最端連結部に取り付けられている。  (もっと読む)
(もっと読む)
荷役物搬送装置
【課題】大きな設置スペースを必要とせず、設備コストが少ない、常に作業者が操作する必要がなく、ジブクレーンとロボットの動作を同期させるための特別な制御が必要なくロボットに過大な負荷がかかるリスクが少ない荷役物搬送装置を提供。
【解決手段】それぞれ床30に固定された、荷役物搬送用バランサーアーム 6と、教示された動作プログラムに基づいてプレイバック再生運転可能なロボット 7と、からなり、バランサーアーム 3を駆動するエアーシリンダ 4の圧力は、ハンド装置 2が把持する荷役物 1の荷重に応じて調節されるようにされ、ロボット 7の先端とバランサーアーム 3先端のハンド装置 2とを結合又は固着させ、ロボット 7を作動させてバランサーアーム 3の先端を動かしてハンド装置 2を作動させて荷役物 1を把持し、搬送するようにした。
(もっと読む)
1 - 20 / 33
[ Back to top ]