
Fターム[3C007CV09]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が回動するもの (446) | 多自由度に回動 (70)
Fターム[3C007CV09]に分類される特許
1 - 20 / 70
多関節ロボット
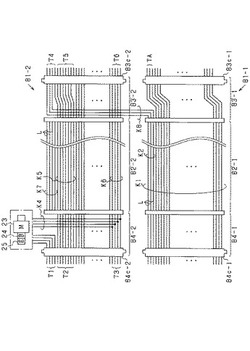
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット

【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 入力部材14に対し出力部材15を、3組以上のリンク機構11を介して姿勢を変更可能に連結する。リンク機構11は、入力側および出力側の端部リンク部材11a,11cと、中央リンク部材11bとでなる。リンク機構11は、各リンク部材11a,11b,11cを直線で表現した幾何学モデルが、中央リンク部材11bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。3組以上のリンク機構11のすべてに、入力部材14に対して出力部材15を任意の姿勢で静止させることが可能な静止機構4を設ける。また、入力部材14および出力部材15にそれぞれ形成された被接触部に接触して入力部材14と出力部材15とを互いに連結する構造体5を設ける。
(もっと読む)
荷物移送用ロボットと該ロボットの制御方法
【課題】棚の上などにおいた荷物を所定位置に好適に押すことのできる荷物移送用ロボットを提供する。
【解決手段】荷物移送用ロボット1であって、車輪2dを有するベース2と、ベース2に対して傾動可能に設けられるボディ3と、ボディ3をベース2に対して傾動させる傾動装置8と、ボディ3に対して動作可能に設けられるアームと、アームをボディ3に対して動作させる動作装置10,11と、制御装置12を有する。制御装置12は、傾動装置8を制御してボディ3をベース2に対して傾動させてボディ3の傾動方向の反対側にスペース18を形成し、かつスペース18を形成した時に動作装置10,11を制御してスペース18にアームの一部または全部を移動させる制御モードを有する。
(もっと読む)
アーム装置
【課題】容易かつ迅速に対象物を任意の空間位置で固定することのできるアーム装置を提供する。
【解決手段】着脱自在に取り付けられた対象物Oを任意の空間位置で固定するためのアーム装置1であって、基台2に設けられた第1の関節機構3と、基端部41が前記第1の関節機構3によって継合され、当該第1の関節機構3によって軸回りの回動と角度の変位とこれらの動作のロックとが行われ、先端部42に前記対象物Oを着脱自在に取り付ける対象物着脱手段6を備えるアーム部4と、前記基端部41と前記先端部42との間に、前記アーム部4の軸回りの回動と角度の変位とこれらの動作のロックとを行う少なくとも1つの第2の関節機構5と、を有し、第1の関節機構3および第2の関節機構5はともに、伸縮する軸部材71の伸縮に応じて縮径および拡径するように固定されたボール部72を有するボールジョイント74であることを特徴とする。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化を図る。
【解決手段】基板100と基板200を、Z軸が中心軸となるように、XY平面に平行に配置する。4本のリニアアクチュエータP10〜P40を、X軸の正側および負側、Y軸の正側および負側にそれぞれ配置し、その上下両端を、転がり球面軸受Q10〜Q40、R10〜R40を介して各基板に接続する。各基板の中心には、接続部材P50を配置し、上端を転がり球面軸受Q50を介して基板100に接続し、下端を基板200に固着する。P10〜P40を伸縮駆動することにより、上方基板100をX軸/Y軸まわりに回転駆動させる。可撓性導電膜201〜204と、基板300上の固定電極E10〜E40とによって容量素子が構成され、その静電容量値の変化に基づいて、基板100に作用したX軸/Y軸まわりのモーメントMx,Myを検出する。
(もっと読む)
ロボット
【課題】ロボットの稼働中におけるアーム機構の脱落を抑制し、必要に際してアーム機構を簡便に着脱可能とし、ロボットを容易に運用可能にする。
【解決手段】ロボット1のアーム機構7が、アーム20に連結された一対のリンク21,22の間に架け渡された付勢ユニット24を備え、各リンク21,22が被係止部81,82を有し、付勢ユニット24が、付勢部材66を収容するハウジング60と、各リンク21,22の被係止部81,82にそれぞれ係止される一対の係止部61,62を有し、係止部61,62は被係止部81,82が挿通される取付孔73,78と、取付孔72,77を取り囲む周縁部74,79の一部が切除されて形成された切除部75,80とを有し、取付孔73,78が切除部75,80を介して係止部61,62の外方に開放されている。
(もっと読む)
回転角度検出装置、有関節構造体および態様取込装置
【課題】回転して角度が検出される可動領域を従来と比べて大きくすること。
【解決手段】軸支持部102aと軸支持部102aに直交する方向に延びる軸受部材102b,102cとを有する枠体101と軸支持部102aに支持され且つ軸支持部102aの面に対して凸上に延びる回転軸111と軸支持部102b,102cに支持され且つ軸支持部102b,102cの面に対して凸上に延びる回転軸122と回転軸111回りの回転角度を検出する回転角度検出部材113と回転軸121回りの回転角度を検出する回転角度検出部材122と回転角度検出部材113および回転角度検出部材122に電気的に接続され且つ枠体101に支持された基板114とを備えたことを特徴とする回転角度検出装置。
(もっと読む)
3自由度能動回転関節
【課題】3自由度能動回転関節の小型化および軽量化を図ると共に回転アクチュエータをバランスよく配置させて、一対のリンク間の動特性を向上させる。
【解決手段】一方のリンク10aが接続される回転体20と、各出力軸101x、101y、101zが回転体20の中心に指向し相互に直交するように配置され、回転体20を回転させるX軸用、Y軸用、Z軸用の回転アクチュエータ100x、100y、100zと、各回転アクチュエータ100x、100y、100zの出力軸101x、101y、101zを回転体20に結合させる位置で支持すると共に回転体20の他の2軸まわりの回転を許容する可動体110x、110y、110zと、を備え、一方のリンク10aは回転体20に対して、各出力軸101x、101y、101zから略同距離の位置に接続されている。
(もっと読む)
三次元的動作機構構造体
【課題】小型化された構造で頭の動きを模することができるとともに製造コストを抑え、位置制御を確実でしかも容易に行うことのできる三次元的動作機構構造体を提供すること。
【解決手段】三次元的動作機構構造体は、頭部と、前記頭部の下方に位置するよう配設された胴部と、前記頭部に接続されるとともに、前記胴部に軸支された左右回動部材に連結され、前記左右回動部材を回動することにより、前記頭部を左右に揺動させる左右揺動用平行リンク機構と、前記頭部の前方または後方のいずれか一方に接続されるとともに、前記胴部に軸支された前後回動部材を回動することにより、前記頭部を前後に揺動させる前後揺動用リンク機構と、を備え、前記左右回動部材と前記前後回動部材とを回動することにより、前記頭部を三次元的に動作させるよう構成されている。
(もっと読む)
ロボットハンド及びこれを含むロボット
【課題】 指構造体における関節のうちの一部の動きが他の関節の動作に影響を与えないように構造を改善したロボットハンド及びこれを含むロボットを開示する。
【解決手段】 MP関節部のうち、ロール方向に回転するMPロール関節部とピッチ方向に回転するMPピッチ関節部は、オフセットが形成されるように互いに離間して配置される。このような構造により、各関節部の可動角が大きくなり、正確な制御が可能になる。また、ロボットハンドの内部における全体的な摩擦が減少し、システム全体が安定化する。
(もっと読む)
ロボットの関節機構の制御装置
【課題】ジンバルリンクを有するロボットの関節機構による動作を簡易なアルゴリズムで高精度に解析することができるロボットの関節機構の制御装置を提供する。
【解決手段】固定位置算出手段により、第1モータ191および第2モータ192のモータ角θ1およびθ2から、第1ロッド171および第2ロッド172の他端位置171b,172bを算出しておき、仮ロッド長算出手段12が、一端位置171a,172bの前回値を用いて、第1ロッド171および第2ロッド172の仮ロッド長L´を算出する。そして、ロッド不定位置決定手段16が、この仮ロッド長L´と実際のロッド長Lとの偏差であるロッド偏差ΔDを0に収束させることで、第1ロッド171および第2ロッド172の一端位置171a,172aを決定する。最終角度出力手段17が、一端位置171a,172aから、メインリンク150の姿勢角α,βや手180の姿勢角を算出して出力する。
(もっと読む)
ワーク搬送装置
【課題】 少ない駆動源でワーク保持部材を3軸方向に移動させることができ、小さな駆動源で軽快な移動動作が可能なワーク搬送装置を提供する。
【解決手段】 X,Y,Z軸の直交座標系において、第1および第2の走行体3,4は、X軸方向のレール2に沿って走行可能である。第1の走行体3は、X軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに揺動自在に第1の揺動アーム5を支持する。第2の走行体4は、Z軸方向の軸心回りに揺動自在に第2の揺動アーム6を支持する。第2の揺動アーム6の先端に、Z軸方向の軸心回りに回動自在に支持部材7を設ける。支持部材7にZ軸方向にスライド自在に支持され、かつ第1の揺動アーム5の先端にX軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに回動自在に支持されたワーク保持部材8を設ける。
(もっと読む)
ロボット
【課題】 軽量、安全かつ優れた制御性能を共に達成することができるロボットを提供することを目的とする。
【解決手段】 本体1と、3自由度変位できる肩関節部2と、上腕リンク3と、2自由度変位できる肘関節部4と、前腕リンク5と、を備え、すべてのアクチュエータが前記本体1に設置され、前記アクチュエータが4本以上の一関節筋11〜14を介して前記肩関節部2と前記上腕リンク3とを駆動し、3本以上の二関節筋15〜17を介して前記肘関節部4と前記前腕リンク5とを駆動する。
(もっと読む)
ロボット
【課題】少ない自由度の首関節で、視野を基体に遮られることなく下方を視認可能なロボットを提供する。
【解決手段】ロボット100は、胴部10と、胴部10の上部と首関節20を介して連結される頭部30と、頭部30に搭載されて外界を撮像する撮像装置40とを備える。首関節20は、水平軸L1回りに回動する第1の回動部21と、頭部30が当該ロボット100の正面を向いた状態で垂直方向から前方に傾斜する回動軸L2回りに回動する第2の回動部22とを備える。そして、第1の回動部21の回動軸L1の上方に第2の回動部22の回動軸L2が位置する。
(もっと読む)
ロボット
【課題】少ない自由度の首関節で、歩行時に頭部を下向ける必要なく、足元等左右周辺の床面状況を素早く視認可能なロボットを提供する。
【解決手段】ロボット100は、胴部10と、胴部10の上部と首関節20を介して連結される頭部30と、頭部30に搭載されて外界を撮像する撮像装置40とを備える。首関節20は、水平軸L1回りに回動する第1の回動部21と、垂直軸L2回りに回動する第2の回動部22とを備え、水平軸L1の上方に垂直軸L2が位置する。そして、頭部30が当該ロボット100の正面を向いた状態で撮像装置40の撮像方向が下向きに傾斜している。
(もっと読む)
ロボットハンド
【課題】種々の対象物を容易に取り扱うことができるロボットハンドを提供する。
【解決手段】可動部2を移動させて可動部2の物体接触面Pを対象物に接触させ、スライドアクチュエータ13を作動させてピストン11をシリンダ9内に所定量だけ押し込み、シリンダ9内に貯留されていた水を供給管10を介して液体供給口8から物体接触面P上に供給する。これにより、水の表面張力に起因して物体接触面Pの摩擦係数が変化し、種々の対象物を取り扱うことが可能となる。物体接触面Pの摩擦係数を元に戻す場合には、可動部2の物体接触面Pに超音波振動を発生させ、この超音波振動によって物体接触面Pに残った水分を霧化蒸発させる。
(もっと読む)
医療用ロボットシステム
【課題】本発明は、支持する器官の形状の個人差等に対応することができ、しかも部品点数の増加を抑えることができる医療用マニピュレータを備えた医療用ロボットシステムを提供する。
【解決手段】ロボットアーム24と、ロボットアーム24に着脱自在に設けられ、子宮Aを所定の位置に支持するための子宮マニピュレータ34と、ロボットアーム24及び子宮マニピュレータ34を操作するコンソール26と、を備えた医療用ロボットシステム10であって、子宮マニピュレータ34は、基部58に設けられた第1アーム部60と、第1アーム部60よりも先端側に位置して子宮Aを保持する第2アーム部64と、第1アーム部60と第2アーム部64とを連結し、かつ第1アーム部60に対する第2アーム部64の向きを可変可能な連結部68とを備え、第2アーム部64は、長手方向に伸縮可能に形成されている。
(もっと読む)
真空吸着パッドセッティング装置における定置板の傾斜角度設定装置
【課題】真空吸着パッドをワークの形状に合う様に傾斜角度を設定できる装置を提供する。
【解決手段】移動盤1上に2つのモータ102・202を水平面内で直交配置し、第1モータの出力軸に左右に同じ長さの第1アーム103を固設し、第2モータの出力軸に左右に同じ長さの第2アーム203を固設し、第1アームの両端部に第1リンク105a,bを枢着し、第2アームの両端部に第2リンク201を枢着し、真空吸着パッドが載置される定置板300を備え、定置板を回転自在に支持する支持ビームを定置板の下側に横断状に設け、支持ビームの両端部に第1自在継手107a,bを設け、第1リンクの上端部を該第1自在継手を介して該支持ビームに連結するとともに、定置板の外周縁であって支持ビームと直交する一直線上に突腕部307a,bを突設し、該各突腕部に第2自在継手207a,bを設け、第2リンクの上端部を第2自在継手を介して定置板に連結する。
(もっと読む)
関節機構
【課題】1つの駆動源を動作させることによって2つの自由度を実現することができる関節機構を提供すること。
【解決手段】本発明の関節機構は、少なくとも固定状態となる第1のギア10と、第1のギア10の中心軸方向に第1のギア10と対向して配置され、回転可能とされた第2のギア20と、第2のギア20を回転させる第2のギア用駆動源21と、第1のギア10の中心軸方向と交差する方向に配置された棒状部材50と、棒状部材50とともに棒状部材50を中心軸として回転可能とされ、第1及び第2のギア10,20と噛み合う第3のギア30と、棒状部材50を中心軸として棒状部材50とは独立に回転可能であって、第1及び第2のギア10,20と噛み合う第4のギア40と、を備えていることを特徴とする。
(もっと読む)
1 - 20 / 70
[ Back to top ]