
Fターム[3C007DS01]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 単一の挟持装置又は吸着装置 (1,104)
Fターム[3C007DS01]の下位に属するFターム
複数の把持部を有するもの (214)
Fターム[3C007DS01]に分類される特許
141 - 160 / 890
ロボットハンド
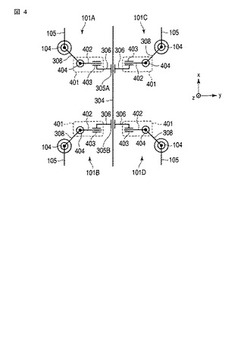
【課題】任意の形状を有する対象物体を安定して把持することができるロボットハンド機構を提供することにある。
【解決手段】ロボットハンド機構においては、第1及び第2可動部305A、305Bが直動機構304に移動可能に支持される。第1可動部305Aは、接続機構401を介して指部101Aの受動回転部104及び指部101Cの受動回転部104に結合される。第2可動部305Bは、接続機構401を介して指部101Bの受動回転部104及び指部101Dの受動回転部104に結合される。直動機構が駆動モータ301によって駆動されると、第1及び第2可動部305A、305Bが互いに反対向きに移動される。第1及び第2可動部305A、305Bの直動運動に伴って、接続機構401によって各受動回転部104が回転される。この結果、指部101A、101B、101C、101Dの駆動方向が変更される。
(もっと読む)
ロボットハンド

【課題】 曲げ剛性を確保しつつ制振性を向上させることができるロボットハンドを提供する。
【解決手段】 ロボットハンド1は、互いに積層されたCFRP層2,3と、CFRP層2とCFRP層3との間に配置された制振弾性層4と、を備えている。制振弾性層4は、粘弾性樹脂と粘弾性樹脂に混練された繊維状物質とを含む材料からなる粘弾性樹脂領域41を有する。繊維状物質は、粘弾性樹脂の剛性よりも高い剛性を有する。このロボットハンド1によれば、CFRP層2とCFRP層3との間に、剛性が比較的高い繊維状物質が混練された粘弾性樹脂を含む材料からなる粘弾性樹脂領域41を有する制振弾性層4が配置されているので、曲げ剛性を確保しつつ制振性を向上させることができる。
(もっと読む)
把持装置の制御装置及び把持装置の制御方法
【課題】高い把持力を維持しつつ、電動モータの消費エネルギーを低減し、高耐久化を実現させる。
【解決手段】CPUは、把持対象物を把持するのに必要な所定把持力Faを一対のフィンガーに発生させる第1の電流指令値I1*を電源部に出力する。電源部は、第1の電流指令値I1*に対応する第1の電流値I1の電流を電動モータに供給する。また、CPUは、電流指令を歯車減速機のヒステリシス特性に基づき、所定把持力Faが維持される第2の電流指令値I2*に減少させる。電源部は、第2の電流指令値I2*に対応する第2の電流値I2の電流を電動モータに供給する。
(もっと読む)
把持装置
【課題】対象物の内周面を利用して対象物を把持する場合に、複数の把持部で対象物を把持する前にいずれかの把持部が内周面に当たって、その結果、対象物の位置または姿勢が変化してしまうことを防止する。
【解決手段】対象物1の内周面1aを利用して対象物1を把持する把持装置10。対象物1を把持する複数の把持部3a、3b、3cと、これら把持部の動作を制御する制御装置11と、を備える。複数の把持部は、内周面1aの中に挿入された状態で、互いに離間する方向に離間駆動され、これにより、内周面1aに押し付けられることで対象物1を把持する。さらに、把持部に設けられた位置情報取得センサ11aを設ける。離間駆動の時に、位置情報取得センサ11aは、把持部と内周面1aとの位置関係を検出し、制御装置11は、該位置関係に基づいて把持部の位置を調整する。
(もっと読む)
回転板位置調整装置及び方法
【課題】構造が簡易で、回転板の微小変位に対応可能な、回転板位置調整装置及び方法を提供する。
【解決手段】吸着搬送装置51と認識カメラ7と制御装置10とを備えた回転板位置調整装置50において、上記吸着搬送装置に備わり回転板2の吸着動作を行う吸着ヘッド1は、ヘッド本体101と、上記回転板を吸着する金属製の吸着パッド102と、上記ヘッド本体と上記吸着パッドとを接合し、かつ上記回転板の姿勢に上記吸着パッドが倣うように変形する接着部103とを備えた。
(もっと読む)
把持装置
【課題】把持装置の駆動装置を大型化することなく、寸法が異なる複数種類の対象物を把持できるとともに、把持する対象物の種類を変更する場合の対応時間を短縮ことができる把持装置を提供する。
【解決手段】寸法が異なる複数種類の対象物1、2を把持して移動させる把持装置10。対象物1、2を把持するように駆動される把持部3と、把持部3が動作可能に把持部を保持する保持体5と、把持部3に装着可能なアタッチメント7と、を備える。把持部3は、アタッチメント7が装着されていない時には、第1種類の対象物1を把持可能であり、アタッチメント7が装着されている時には、アタッチメント7を介して第2種類の対象物2を把持可能である。
(もっと読む)
ロボットハンド
【課題】駆動源が非常停止したときにワークを落下させることなくワークを保持できるロボットハンドを提供する。
【解決手段】一対の落下防止機構40L・40Rを具備し、一対の落下防止機構40L・40Rは、ワーク100を把持するときにワーク100に接触する把持カム41と、把持カム41を回動可能に支持する回転支点ピン42と、を備え、各把持カム41・41は、ワーク100を把持するときに、一対の駆動フィンガー30L・30Rをワーク100に近接させることにより、ワーク100に押圧され、各把持カム41・41には、ワーク100を把持している状態で、ワーク100の自重によりワーク100へ近接する方向B1・B2への回動力が加えられ、把持カム41にワーク100へ近接する方向B1・B2への回動力が加えられることにより、把持カム41によるワーク100に対する押圧力が増加する。
(もっと読む)
圧縮ばねハンドリング装置
【課題】
サイズが異なる複数の圧縮ばねを取り扱う事が可能な圧縮ばねハンドリング装置を提供すること。
【解決手段】
本発明に係る圧縮ばねハンドリング装置は、圧縮ばねを圧縮方向に挟持する開閉自在な対となった挟持爪を有する挟持爪ユニットと、前記挟持爪それぞれに対応して設けられ、前記挟持爪と一緒に移動すると共に圧縮ばねを挟持した状態において挟持爪と当接している圧縮ばねの端部を押し、挟持された圧縮ばねを前記挟持爪ユニットから押し出すプッシャーと、各前記プッシャーを押出方向に同期駆動する押出駆動部と、から構成されている。
(もっと読む)
ロボットハンド
【課題】ワークに対して、左右1対の平面により把持する場合であっても、把持状態を安定させることを可能とするロボットハンドを提供する。
【解決手段】ワーク12を把持するロボットハンド11であって、一対の爪13、14と、一対の爪13、14の間隔を開位置と閉位置の間で開閉するチャック装置16を備える。爪の一方である爪13は、その中間位置に、閉位置において、ワーク12の表面に接触する単一の凸部分13aを有し、爪の他方である爪14は、開位置と閉位置を結ぶ開閉方向に直交する方向の2箇所に、閉位置において、ワーク12の表面に接触する一対の凸部分14aを有する、ことを特徴とするロボットハンド。
(もっと読む)
触覚センサおよびそれを備えたロボット
【課題】検知部の破損および弾性部材の剥離を防止可能な触覚センサを提供する。
【解決手段】触覚センサ10は、基板1と、酸化膜2と、検知部3(31,32)と、弾性部材4と、金属プレート5とを備える。酸化膜2は、基板1上に形成される。検知部3(31,32)は、酸化膜2上に配置される。弾性部材4は、金属プレート5から突出した突出部41,42を有する。弾性部材4は、突出部41,42がそれぞれ検知部31,32を覆うように基板1および酸化膜2上に配置される。金属プレート5は、弾性部材4の突出部41,42と所望の間隔を隔てて突出部41,42の周囲および弾性部材4上に配置される。
(もっと読む)
ワーク保持装置
【課題】負圧源の能力を必要以上に大きくすることなく、かつ、段取り工程を設けることなく、大きさの異なるワークを吸着して保持することができるワーク保持装置を提供する。
【解決手段】ワーク保持装置は、内部に中空部33bが形成された箱状で、ワークWとの当接面33sと中空部33bと連通する複数の貫通穴50を有する。各貫通穴50の軸方向の中間に、直径が貫通穴50の直径よりも大径の洞部51を設け、洞部51に洞部51の直径よりも小径かつ貫通穴50の直径よりも大径のボール52を配置する。
(もっと読む)
マーキング装置およびマーキング方法
【課題】マーキング装置およびマーキング方法において、識別マークを形成できる領域が狭いワークの場合であってもワークに効率よく識別マークを形成することができるようにする。
【解決手段】把持可能領域Hを有するワークWに識別マークMを形成するマーキング装置1であって、把持可能領域HにおいてワークWを把持する把持アーム部6と、把持アーム部6に設けられ、ワークWを把持するとともに、把持した位置に識別マークMの少なくとも一部を形成するマーキング把持部6bと、を備えるものを用いる。
(もっと読む)
ロボットハンド及びロボット装置
【課題】安定して対象物を把持することができるロボットハンド及びロボット装置を提供すること。
【解決手段】所定位置を囲うように配置された支持部材を有する複数の指部と、複数の指部の一端部と連結する連結部と、を備えたロボットハンドであって、少なくとも1つの指部は、屈曲部を有する接触部材と受動素子とを有し、接触部材は屈曲部で回転可能に支持部材に支持され、受動素子は支持部材と接触部材とに接続されている。
(もっと読む)
基板搬送装置及び基板搬送方法並びに記憶媒体
【課題】基板載置部から基板を受け取ったときに基板の姿勢が異常な状態であるか否かを確実に検出すること。
【解決手段】前記フォーク3Aを基体31に沿って前進させ、ウエハWを保持する突き上げピン73に対して上昇させることにより、当該突き上げピン73上のウエハWをフォーク3Aに受け取る。このときに前記保持爪30A〜30Dの各々に設けられた歪みセンサ4A〜4Dにより、保持爪30A〜30Dに上から荷重が加わったときの当該保持爪30A〜30Dの歪み量を検出する。各々の歪みセンサの歪み量に基づいて、ウエハWの姿勢が正常であるか否かを判断し、ウエハWの姿勢が異常であると判断したときに、前記フォーク3Aの後退を禁止する。
(もっと読む)
真空度切替方法
【課題】真空度付与装置において高い真空度から低い真空度への切替を速やかに行うことを可能とする真空度切替方法を提供する。
【解決手段】ワークWを吸着または離脱させる吸引チャック7に接続されている流路部分8を高い真空度の第1の負圧にある状態から相対的に低い真空度に低圧化するに際し、第2の負圧制御装置4に流路部分8を接続した直後に、オン・オフをわずかな期間オフ状態として、流路部分8に外気を導入し、次に、オン・オフバルブ6をオン状態として、第2の負圧制御装置4から吸引チャック7に至る流路部分の低圧化を果し、しかる後、オン・オフバルブ6をオフ状態としてワークWを離脱させる、真空度切替方法。
(もっと読む)
非接触保持装置
【課題】ワークの浮上量を所望の値に設定するための部材点数を抑えることができる非接触保持装置を提供する。
【解決手段】非接触保持装置10は、ワークWに対向する保持面31を有して内部に圧縮空気が導入される保持体12と、保持面31に開口を有して保持体12に導入された圧縮空気を開口から流出する旋回流発生室34を備え、旋回流発生室34に流入した圧縮空気の旋回流によって負圧を形成し、保持面31に設けられた開口から流出する圧縮空気によって保持面31とワークWとの間に正圧を形成することによって、保持面31に接触しない位置にワークWを保持する。そして、保持体12には、旋回流発生室34と保持体12の外側の領域である外側領域Sとを連通させることによって、旋回流発生室34内に流入した圧縮空気を保持体12の外側領域Sへ漏出させる連通路36を備える。
(もっと読む)
応力検出素子、触覚センサー、および把持装置
【課題】小型化が可能で、かつ剪断力および押圧力を正確に検出可能な応力検出素子、触覚センサー、および把持装置を提供する。
【解決手段】応力検出素子200は、矩形状の開口部111を有するセンサー基板11と、センサー基板11上に形成されて開口部111を閉塞する可撓性を有する支持膜14と、センサー平面視において、開口部111の一辺に沿い、開口部111の内側および外側に跨って設けられ、湾曲することで電気信号を出力する剪断力検出用圧電体210と、センサー平面視において、開口部111の内側で、剪断力検出用圧電体210から離れた位置に設けられ、湾曲することで電気信号を出力する押圧力検出用圧電体310と、支持膜14を覆う弾性膜15と、を具備した。
(もっと読む)
制御回路簡略化ロボット
【課題】制御回路、アクチュエータ、把握機構を軽減し、きめ細かいロボット製作やメンテナンスを可能にする。
【解決手段】制御装置の解決手段についてはプログラムを収めるメモリのアドレスを指定する装置として二つ以上の加算または減算のみを行うカウンタと、そのどちらを加算または減算するかを切り替える装置を取り付ける事により、メモリアドレスのジャンプを行う回路を廃し回路の複雑化を防ぐ。アクチュエータの機構に関する解決手段としては一本の出力軸を複数のモーターが共有し、そのモーターの中のひとつだけを正転用、残りのモーターを逆転用として取り付ける事でモータードライブ回路の単純化を実現する。物体の把握機構におけるアクチュエータ過負荷対策として複雑化してしまう傾向に対しては、錘を用いて地球の重力を利用した把握機構を製作することにより、アクチュエータへ直接過負荷が加わる事を防ぐ。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
薄板材料の吸着装置
【課題】薄板材料の吸着に際しての空気漏れをなくすとともに薄板材料の取り外しを容易にする。
【解決手段】重ね合わせた一方のプレート3及び他方のプレート2の各々が対向することで形成された吸気通路53内の空気を吸気孔43より吸引すると、薄板材料10の外縁部10aが先端側に形成された吸引部5内の、案内部51に案内されて、案内部51に連続する吸着部52に進入し、他方のプレート2の壁面231が薄板材料10の外縁部10aに対向し、他方のプレート2の吸着面22が薄板材料10の外縁部10aの他方の縁部10a1に当接し、他方のプレート2の通路面24の終端にある第二段部(平面部)26の縁部261を支点として、一方のプレート3が他方のプレート2側へ撓み、一方のプレート3の吸着面32が薄板材料10の外縁部10aの一方の縁部10a1に当接することで薄板材料10を吸着して保持する、薄板材料の吸着装置1を提供する。
(もっと読む)
141 - 160 / 890
[ Back to top ]