
Fターム[3C007DS05]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 複数の挟持装置又は吸着装置 (152)
Fターム[3C007DS05]の下位に属するFターム
直線配列型 (49)
平面マトリックス配置 (16)
タレット型 (35)
Fターム[3C007DS05]に分類される特許
41 - 52 / 52
加工物移送装置
1つ以上の加工物、例えば、半導体ウエハを操作するための加工物移送アセンブリは、加工物の外径に対応する1つ以上の弓状部分を含む。この弓状部分は、加工物の外端に係合する加工物係合表面を有する;少なくとも1つの協働アームが、加工物の係合表面から加工物の外端部上に加わる圧力に応じて、加工物から離れる方向に加工物係合表面の変形を可能にするたわみアセンブリを含む。 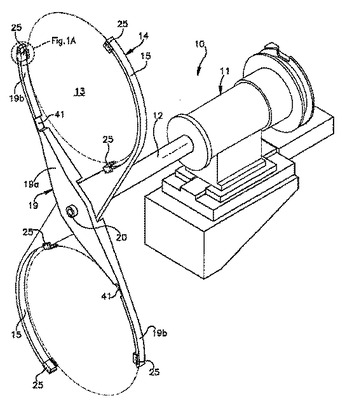 (もっと読む)
(もっと読む)
ワークの搬送方法及びその搬送方法に用いられる搬送装置
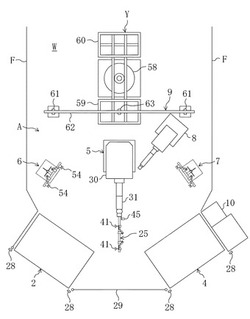
【課題】 パレットに収容されたアウタパネルを取り出して治具まで搬送する際の時間を短縮してドアの生産効率を向上させる。
【解決手段】 2枚のアウタパネルを1組にしてパレットに収容しておく。搬送用ロボット5に装着した可動センサ45によりパレット内のアウタパネルの3次元位置を検出し、把持用マテハン25により2枚のアウタパネルをパレットから一度に取り出す。2枚のアウタパネルのうち、1枚のアウタパネルを仮保持装置6、7に仮保持させておき、他の1枚を治具Yまで搬送する。この搬送途中に、固定センサ63によりアウタパネルと把持用マテハン25との相対位置を検出する。この相対位置が正規の位置からずれている場合にはロボットアーム31の動きを補正してアウタパネルを治具Yの正確な位置に置くことができようにする。その後、仮保持装置6、7に保持されているアウタパネルを把持用マテハン25で把持し、同様に治具Yに置く。
(もっと読む)
マニプレータ及び多関節駆動機構

【課題】各アームの動作に支障を来たさない様に、各アームをグリッパとしても利用することが可能なマニプレータ及び多関節駆動機構を提供する。
【解決手段】第1フレーム1の関節角度が回転角度−90°のときに、第1突起爪C1の先端と第2突起爪C2の先端とが重なり合い、第1フレーム1の関節角度が回転角度−90°よりも負回転方向になると、第1突起爪C1の先端と第2突起爪C2の先端とが離間して、グリッパAGの機能が果たされる。従って、第1フレーム1の関節角度が回転角度−90°になるまでは、多関節駆動機構Rが通常運動に使用され、また第1フレーム1の関節角度が回転角度−90°よりも負回転方向になると、グリッパモードとなって、グリッパAGの機能が果たされる。
(もっと読む)
ロボットハンド
【課題】コンパクトな構造でありながら把持形態の自由度が高く、しかも把持対象物の形状汎用性に優れた二指把持タイプのロボットハンドを提供する。
【解決手段】ハンド本体2に一対のフィンガー3,3を対向配置する。各フィンガー3は、根元側指要素4aと第1,第2中間指要素4b,4cおよび先端側指要素4dを四つの関節5a〜5dをもって相互に連結した多関節構造のものである。各指要素4a〜4dは先端側になるにしたがってその形状および全長が段階的に小さくなるように設定されていて、根元側指要素4a以外の各指要素4b〜4dはそれよりも一段根元側の各指要素4a〜4cに折り畳み格納可能な構造となっている。
(もっと読む)
基板搬送装置
基板搬送装置は、フレーム、駆動部、及び関節アームを有している。かかる駆動部は、多数の異なる交換自在なモータモジュールから選択され、配置するのに選択自在な少なくとも1つのモータモジュールを有する。各モータモジュールは、異なる予め決められた特性を有している。関節アームは関節接続部を有している。アームは、関節結合のために、駆動部に接続されている。アームは、各々が予め決められた構造特性を有する多数の異なるアーム構造から選択自在な構造を有している。アーム構造の選択は、駆動部における配置のために、少なくとも1つのモータモジュールの選択によりなされる。  (もっと読む)
(もっと読む)
半導体ウエハ移載装置、半導体ウエハ取出方法及び半導体ウエハ収容方法
【課題】半導体ウエハ移載装置の構造を簡易にしかつその製造コストを低減することができ、全ての半導体ウエハを短時間で効率良く容器から取り出しあるいは容器に収容できる半導体ウエハ移載装置、半導体ウエハ取出方法及び半導体ウエハ収容方法を提供する。
【解決手段】半導体ウエハWの一部がフープ32から露出してきたところで一対の支持部材14、16を挿入させることにより、複数枚の半導体ウエハWの全てを一度に一対の支持部材14、16で支持させることができ、フープ32から全ての半導体ウエハWを一度に取り出すことができる。一方、複数枚の半導体ウエハWの全てを一度に一対の支持部材14、16で支持させることにより、全ての半導体ウエハWを一度にフープ32に収容することができる。
(もっと読む)
被運搬体吸着保持用当接体及び吸着保持装置
【課題】凹凸面を有したタイル等の被運搬体をしっかりと吸着保持することができる吸着保持装置とそのための当接体とを提供する。
【解決手段】タイル10の配列体の上方に吸着保持装置1を配置し、下降させて当接体3のバッグ5の底面をタイル10の上面に押し当てる。当接体3は、バッグ5内に粒子6を充填したものであり、非弾性的に変形する。吸引口2cに負圧源からの負圧を伝達させ、タイル10をバッグ5の底面に吸着保持させる。吸着保持装置1を上昇させると、タイル10はバッグ5に吸着したまま整列枠11から引き離される。当接体3の底面の変形は非弾性的なものであるから、当接体3は元形状に弾性的に復元しようとはせず、各タイル10は当接体3に密着してしっかりと保持される。
(もっと読む)
シート体移載装置及び移載方法
【課題】省スペースを容易に達成するとともに、複数のシート体を所望の位置に効率的に移載するシート体移載装置及び移載方法を提供する。
【解決手段】第1移載ロボット38のロボットハンド50によって保護カバー14を吸着するとともに、吸着位置を所定量ずらせた状態で保護フイルム載置台36に載置された保護フイルムPを吸着し、これらを第2移載ロボット42のロボットハンド90によって保持された積層状態のシートフイルムF上に位置決め載置する。
(もっと読む)
ロボットハンド
本発明は、製品積載用ロボットハンドに関する。本発明の製品積載用ロボットハンドは、複数の製品を一度に積載する。ロボットハンドは、水平に並んで離隔して配列された複数のグリッパーと、これら複数の各グリッパーの上部に結合されて各グリッパーを固定する複数の移動フレームと、これら複数の移動フレームを貫通して固定するガイドロッドと、複数の移動フレームの両側に設けられた一対のガイドウイングと、これら一対のガイドウイングを互いに連結させ、長さ調節可能なシリンダロッドとを具備する。 (もっと読む)
マウントヘッド
【課題】
バキュームプレートがワーク面にならうことにより、ワークとバキュームプレートの平行度を確保し、大量の半田ボールを正確にワークにマウントすることのできるボールマウント装置のマウントヘッドを提供すること。
【解決手段】
本発明は、マウントヘッドに次の手段を採用する。
第1に、ワークとバキュームプレートの平行度を確保する手段として、マウントヘッド下面に設けたバキュームプレートの多数の吸着孔に、真空圧を発生させ、ボールを吸着し、該マウントヘッドがボールマウント位置に移動し、ワークにボールをマウントするボールマウント装置のマウントヘッドとする。
第2に、ボールを吸着するための多数の吸着孔が開けられると共にマウント時にワーク面にならう薄肉のバキュームプレートと、該バキュームプレートを外力から支持する支持プレートとを具備する。
(もっと読む)
マイクロチューブ用一括ピッキング工具
【課題】マイクロチューブがマトリクス状に配列収納されているチューブラックから、全てのマイクロチューブを一括して他のチューブラックに移し替えることが可能なマイクロチューブ用一括ピッキング工具を提供すること。
【解決手段】弾性のある円筒状突起112をチューブラック内に配列収納されたマイクロチューブMTの全ての隙間に挿入できるように複数本配置し、円筒状突起の外径は、4つのマイクロチューブによって形成された隙間に外接する円の直径よりも大きく、円筒状突起の突起同士の隙間に、円筒状突起に把持されたマイクロチューブの頭部に当接し、押し込むことにより、円筒状突起に把持されたマイクロチューブを押し戻して把持状態を解除する複数の押し出しピン122を有していることにより、上記課題を解決する。
(もっと読む)
把持装置および移載機
【課題】容器21が変形していても確実に把持できる把持装置13を提供する。
【解決手段】容器21の側面に当接して押さえる側面押え部39を設ける。容器21の上側周縁部で内周側に折り曲げられている折曲部27に係脱可能とするフック49を設ける。フック49を容器21の折曲部27に係合させて側面押え部39との間で把持する把持位置と、容器21の折曲部27から離反する把持解除位置との間で移動させるシリンダ47を設ける。側面押え部39が容器21の側面に当接して押さえ、フック49が容器21の折曲部27に係合し、これら側面押え部39とフック49との間で容器21が変形していても確実に把持する。
(もっと読む)
41 - 52 / 52
[ Back to top ]