
Fターム[3C007DS05]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 複数の挟持装置又は吸着装置 (152)
Fターム[3C007DS05]の下位に属するFターム
直線配列型 (49)
平面マトリックス配置 (16)
タレット型 (35)
Fターム[3C007DS05]に分類される特許
21 - 40 / 52
把持装置及び搬送装置
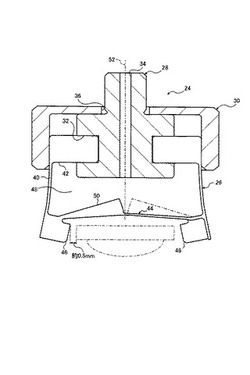
【課題】被把持部材が小型であっても、被把持部材を損傷させることなく把持する。
【解決手段】把持パット26は、内部空間48に圧縮空気が供給されると、把持装置22の中央に位置する鉛直方向の軸線52上の点を中心としてダイヤフラム部44が円板状に変形する。ダイヤフラム部44が円板状に変形すると、4つの接触部46によって囲まれる円形の領域は、把持装置22が把持するレンズよりも半径が約0.5mm大きくなる。内部空間48内が大気圧にされると、把持パット26が気圧差による外力を受けなくなり、接触部46それぞれがレンズに側方から接触する。つまり、把持装置22は、接触部46がレンズに接触する圧力でレンズを把持する。
(もっと読む)
ロボットハンド装置

【課題】 簡単な構成によって、受光部に対する他の投光部からの干渉を防ぐことができる投光部および受光部の複数対からなる光学的検出手段を備えたロボットハンド装置を提供する。
【解決手段】 ハンド基体11と、ハンド基体11に上下に等間隔で取付けられた複数のハンド12と、各ハンド12上のワーク6の有無を検出する光学的検出手段18とを含む。ハンド12にワーク6を載せて目的位置に移送するためのワークの移載装置1であって、光学的検出手段18は、各ハンド12に対応して対を成す投光部19〜23および受光部24〜28の複数対から成り、各投光部19〜23および受光部24〜28の対は、ハンド基体11に、各ハンド12の幅方向両側に対向関係で配置され、投光部19〜23および受光部24〜28は上下に交互に配置され、かつ、各投光部19〜23と対向関係にある受光部24〜28と、それに隣接する他の受光部とは、幅方向に直交する方向に互いにずれた位置関係で配置される。
(もっと読む)
エンドエフェクタ及びそれを備えた搬送装置
【課題】1個のエンドエフェクタにおいて、ウェハを2枚搬送することができるようにする。
【解決手段】ウェハを把持する把持機構を備えたエンドエフェクタ3において、エンドエフェクタ3の上面に把持機構を備え、上面の裏面にも把持機構を備え、エンドエフェクタの上面及び裏面の両方でウェハを把持可能に構成する。
(もっと読む)
ワーク吸着移送システムにおける給排気制御装置
【課題】個々の吸着パッドに取り付けられる小型軽量の電動エアーポンプによって吸着パッドの真空吸引を行い得るとともに、該電動エアーポンプによって真空破壊用の圧搾エアーを生成し得るワーク吸着移送システムの給排気制御装置を提供する。
【解決手段】電動エアーポンプ1の吸気口2と該吸気口2に接続される吸着パッド23との間に配設した第一電磁弁22を、吸着パッド23内の真空度が所定真空度未満の場合には吸着パッド23内のエアーを吸引する内気吸引状態に切り換え、吸着パッド23内の真空度が所定真空度に達した場合には外気を吸引する外気吸引状態に切り換えられるようにして、電動エアーポンプ1の吸気口2からエアーを吸引し、排気口3から吐出されるエアーをエアー貯留槽28に貯留するようにした。これにより、電動エアーポンプ1によって吸着パッド23の真空吸引を行い得るとともに、該電動エアーポンプ1によって真空破壊用の圧搾エアーが生成できる。
(もっと読む)
複数のウェハを取り扱う能力を備えた受渡し機構
一体化されたロボット機構は、搬送機器を改善し、対象物移動を、アライメント又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、複数の加工物を移動させるための多重エンドエフェクタと、1つの加工物を移動させるための単一エンドエフェクタと、アライメント能力を提供するためのロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有することができる。本発明のロボットアセンブリは、ソータ又はストッカ機器において、処理機器において、及び受渡しシステムにおいて使用されることができる。 (もっと読む)
真空処理装置、基板搬送方法
【課題】複数枚の基板を一台のハンドに乗せて正確な位置に搬送する。
【解決手段】ハンドに設けられた第一、第二の載置部15a,15bと、第一、第二の台座9a,9bとの間の距離が異なるように高さを違えておき、搬送室内から処理室内に基板16a,16bを第一、第二の台座9a,9b上に配置する際に、先ず、距離が近い方の第一の載置部15aと第一の台座9aとを位置合わせし、第一、第二の載置部15a,15bを降下させ、近い方の第一の台座9a上に基板16aを載置し、第一の載置部15aを基板16aの裏面から離間させた状態で、他方の第二の載置部15bと第二の台座9bを位置合わせし、基板16bを配置する。基板16a,16bを一枚ずつ位置合わせして配置することができる。
(もっと読む)
産業用ロボット
【課題】旋回径を小さくしつつ、1回の搬入動作あるいは搬出動作で複数の搬送対象物を搬送することが可能な産業用ロボットの具体的な構成を提供すること。
【解決手段】ロボット1は、複数の搬送対象物2を搭載する第1ハンド3、第2ハンド4と、第1ハンド3、第2ハンド4をそれぞれ保持する第1アーム5、第2アーム6と、第1アーム5および第2アーム6を保持する共通アーム7と、共通アーム7に対する第1アーム5、第2アーム6のそれぞれの回動中心となる第1回動中心部31、第2回動中心部41と、共通アーム7を保持する本体部とを備えている。第1ハンド3と第2ハンド4とはロボット1の旋回動作時に重なるように配置され、第1ハンド3および第2ハンド4には、第1回動中心部31および第2回動中心部41との干渉を防止するための逃げ部43、44が形成されている。
(もっと読む)
吸着ハンド及び吸着装置並びにワークの吸着方法
【課題】サイズの異なるワークであっても安定して確実に吸着することができ、効率の良い作業を行うこと。
【解決手段】ワークの表面W1を吸着して該ワークWをピックアップするハンドであって、ワークの表面に対向する吸着面2aに吸着孔4aが形成されたメインノズル2と、該メインノズルの周囲を囲んだ状態で該メインノズルに対して相対的に移動可能とされ、ワークの表面に対向する先端面3bにメイン通気孔5が形成されたエンドノズル3と、を備え、メイン通気孔が流体を外部に吐出又は外部から吸引を行う通気孔として機能する吸着ハンド1を提供する。
(もっと読む)
ロボットハンド、ロボット及びワークの組み付け方法
【課題】コストダウン及び設備の小型化を図ることができるロボットハンド、ロボット及びワークの組み付け方法を提供する。
【解決手段】ワーク(23)を把持する第1の把持機構11及び第2の把持機構12と、第1の把持機構11と第2の把持機構12とでワーク(23)を持ち替えることができる位置に、第1の把持機構11及び前記第2の把持機構12の少なくとも一方を位置決めする位置決め機構13とを備える構成とする。
(もっと読む)
ギヤ装置組立て方法
【課題】組立てコストを低減できるギヤ装置組立て方法を提供すること。
【解決手段】変速機の組立て方法は、変速機本体11と変速機ケース12とを備える変速機10を、力覚センサ49を有する双腕ロボット30で組み立てる。すなわち、変速機ケース12を双腕ロボット30で把持し、この把持した変速機ケース12を変速機本体11上に配置し、その後、双腕ロボット30の力覚センサ49でハンド42A、42Bに作用する力を監視しながら、変速機ケース12を変速機本体11に接近させ、力覚センサ49の検出値が所定値を超えることなく、変速機ケース12が所定高さh1まで接近した場合には、変速機ケース12をさらに接近させて、変速機本体11に取り付け、変速機ケース12が所定高さh1まで接近する前に、力覚センサ49の検出値が所定値を超えた場合には、変速機ケース12を変速機本体11から離して、再試行する。
(もっと読む)
ガラス搬送ロボットハンド
【課題】 搬送ロボットハンドにより、ガラス板をパレットへ積みつける際に、ガラス板のズレ現象を防止するため、合紙をガラス板間に挟むようにするが、その合紙もガラス板と同時にパレットへ搬送できるロボットハンドにする。しかし、その搬送の際に風圧による合紙のめくれと、パレット積載時の合紙の垂れ下がりとによるトラブルを防止し、効率的なガラス搬送ロボットハンドを提供する。
【解決手段】 二つの課題を解決するため、ガラス搬送ロボットハンド10に吸着されたガラス板1面前に対向して合紙2を配置させると共にそれら面間にブローによるブローダウンする風を送り吸着させ、その風向をガラス面と合紙の4角の対向面方向に特に向け、搬送中のめくれ、と、積付け時の垂れ下がりを発生させないことを特徴とするガラス搬送ロボットハンド。
(もっと読む)
把持装置、及び、ハニカム構造体の製造方法
【課題】 ハニカム構造体を適切な姿勢で把持し、所定の位置に簡便に搬送して載置することができる把持装置を提供すること。
【解決手段】 本発明の把持装置は、回転軸が平行となる少なくとも2個の支持ローラを有する第一の把持部と、上記第一の把持部の支持ローラに対向する少なくとも1個の支持ローラを有する第二の把持部と、上記第一の把持部及び上記第二の把持部を有する少なくとも1つの把持機構とを備え、上記第一の把持部の支持ローラの回転軸と上記第二の把持部の支持ローラの回転軸とは平行になっており、上記第一の把持部及び上記第二の把持部の少なくとも一方を移動させることにより、上記支持ローラを介して上記第一の把持部と上記第二の把持部との間に被把持物を把持することを特徴とする。
(もっと読む)
ワークハンド装置およびワークハンド装置の段取りに使用する段取り台、その段取り方法ならびにワークハンド装置を使用したワーク搬送方法
【課題】特定ワークの専用品とせず、汎用性の高いワークハンド装置を提供する。
【解決手段】ロボット20のアーム21の先端に接続され、アーム21の旋回、伸縮によ
ってワークWを搬送するワークハンド装置1′であり、フレーム2にワークWを位置決めする基準ピン3a,4a,5aと、この基準ピンに内蔵され、ワークWを把持するクランパー3b,4b,5bと、それぞれの基準ピンとクランパー3b,4b,5bを有するそれぞれの第1、第2、第3ピンクランパーユニット3,4,5とを備え、第1ピンクランパーユニット3をX軸方向の位置を固定する第1固定手段9と、第2、第3ピンクランパーユニット4,5をY軸方向へ移動する第2駆動手段7と、第2、第3ピンクランパーユニット4,5をZ軸方向へ移動自在に位置を決めるそれぞれの第3駆動手段8,8′とを備えたワークハンド装置1′である。
(もっと読む)
ワーク把持装置
【課題】装置構成をシンプルにして低コスト化を図るとともに、コンパクト化を図ることのできるワーク把持装置を提供する。
【解決手段】フィンガー61を常時閉じ方向に付勢するスプリング66と、電動式のクランプモータ45と、このクランプモータ45の回転駆動力を伝達する動力伝達機構としてのプーリ76、タイミングベルト78およびプーリ77と、この動力伝達機構によって伝達された回転運動を直線運動に変換するねじ機構72と、このねじ機構72によって伝達される直線運動により直線移動される可動体79と、この可動体79の直線移動をフィンガー61の回動動作に変換するカム溝機構とを備え、可動体79の直線移動がスプリング66の付勢力に抗して行われることによりフィンガー61が開作動される構成とする。
(もっと読む)
部品ピックアップ装置および部品ピックアップ方法
【課題】大きなコストアップを招くことなく、簡易な構成で部品のピックアップ作業を行えるようにする。
【解決手段】ロボット1のアーム11の先端部にホーキマニピュレータ13と、チリトリトレイ33を取り付ける。ホーキマニピュレータ13は、先端にホーキ部31を備え、部品箱5内の部品7を、水平方向にずらすようにして移動させることで、チリトリトレイ33に移載する。
(もっと読む)
ハンド
【課題】厚さが比較的薄い半導体ウエーハと通常厚さの半導体ウエーハなどといった、相反する性質を持つ2種類の半導体ウエーハを、ハンドの構成部品をその都度交換することなく搬送することができるハンドを提供する。
【解決手段】ハンド14の一方側面38Aに設けられた第1非接触保持部40により半導体ウエーハWが非接触の状態で保持される。また、同時に、ハンド14の他方側面38Bに設けられた第2非接触保持部60により半導体ウエーハWが非接触の状態で保持される。
(もっと読む)
段ばらし装置
【課題】 上段の箱体の集合体を把持した後に下段の箱体から離間させる際に落下させることなく確実に把持してばらす。
【解決手段】 物品を収容した複数の箱体を互いが接するように水平に並べて全体が矩形となるように組み合わせて一段の集合体とし、同集合体が段積みされた箱体群を上昇させる昇降台を設け、昇降台の上方に上昇させた箱体群の最上段を把持して横方向に移行する把持装置を設け、把持装置の移行先に把持した一段の箱体の集合体を搬送する搬送コンベヤを設け、前記把持装置は一段の箱体の集合体を四側面から対向して把持する複数の把持板を備え、同把持板には箱体方向に対して水平に進退して把持及び把持解除を行う進退機構を有し、把持板の把持面は平面で且つ対向する把持板間の上側の距離が下側より大きくなるように垂直に対して斜設させた構造とする。
(もっと読む)
チャック治具
【課題】 作業効率を向上させ、作業の迅速化を図ることのできるチャック治具を提供する。
【解決手段】 XYZの三次元方向に移動可能、そして回転可能に設置された治具本体1と、この治具本体1の複数の面にそれぞれ形成された複数の凹み穴10と、各凹み穴10を被覆して半導体ウェーハW等の被保持物品を着脱自在に密着保持する複数の保持層20と、各保持層20に被覆された凹み穴10の空気を外部に排気する複数の排気路30とを備える。半導体ウェーハWを片面持ちではなく、両面持ちで密着保持することができるので、作業の迅速化が期待できる。
(もっと読む)
丸刃せん断式スリッターの刃替え方法およびそれに用いられるロボットハンド、ならびに当該ロボットハンドを備えたハンドリングロボット
【課題】丸刃等を損傷することなく、丸刃等を強く把持して高速で確実なハンドリングすることができる丸刃の刃替え方法およびそれに用いられるロボットハンド、ならびに当該ロボットハンドを備えたハンドリングロボットを提供する。
【解決手段】丸刃せん断式スリッターのアーバーに装着される丸刃および/またはスペーサを交換するための刃替え方法であって、
前記丸刃および/またはスペーサの内周面の少なくとも3ヵ所に複数のフィンガーを当接させ、
前記複数のフィンガーに丸刃および/またはスペーサの半径方向の外方へ向かう力を作用することにより、前記丸刃および/またはスペーサを把持してアーバーに装着または取外しを行なうことを特徴とする丸刃の刃替え方法。
(もっと読む)
棒状部品用吸着ヘッド
【課題】厳密な位置合せを行わなくても、棒状部品を曲げることなく組立台にセットすることができる吸着ヘッドを提供する。
【解決手段】吸着ヘッド97は、電極棒6の最大外径となるガラスビーズ9よりも大きな内径の吸着穴104aを有する吸着ノズル104と、この吸着穴104aに対し、給気穴103b、貫通穴103a、スリット104bによって接続されたヘッド用エアポンプ107とを備えている。吸着ヘッド97は、ヘッド用エアポンプ107の吸気動作により、電極棒6を吸着穴104a内に吸い込み、吸気動作を継続することで保持して組立台まで搬送する。次いで、ヘッド用エアポンプ107を排気動作に切り換えて、吸着穴104aから電極棒6を排出する。
(もっと読む)
21 - 40 / 52
[ Back to top ]