
Fターム[3C007EU02]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | 歯車式 (142)
Fターム[3C007EU02]の下位に属するFターム
傘歯車式 (27)
ラックピニオン式 (45)
ウォームギアを介在させるもの (21)
差動機構を有するもの(遊星歯車等) (9)
Fターム[3C007EU02]に分類される特許
1 - 20 / 40
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
食品の搬送装置

【課題】挟持部材を開操作したときの開度を、送出位置で食品を挟持するときの開度に対して払出位置で食品を払い出すときの開度が小さくなるように設定することができる食品の搬送装置を提供すること。
【解決手段】製造工程から複数個ずつ並んで送出位置Aに送出された食品Wを、挟持部材2によって一旦挟持して持ち上げ、次工程の払出位置Bに整列した状態で払い出す食品の搬送装置1において、挟持部材2を開閉操作する挟持部材操作手段3と、挟持部材操作手段3によって挟持部材2を開操作したときの挟持部材2の開度を、送出位置Aで食品Wを挟持するときの開度に対して払出位置Bで食品Wを払い出すときの開度が小さくなるように設定する挟持部材開度設定手段4とを備えるようにする。
(もっと読む)
部材把持装置、及び部材搬送装置
【課題】コンパクトな部材把持装置を提供する。
【解決手段】環状ベース40の周方向に複数の噛合チェーン式伸縮装置42を配置する。噛合チェーン式伸縮装置48は、一対の噛合チェーン58を備え、周方向から径方向への偏向駆動直後に相互に噛合って一体に自立状態で環状板44の中心軸に向かって移動すると共に、環状板44の径方向から周方向へ偏向駆動時に相互に噛み外れて分岐する。噛合チェーン58の端部には環状部材82に接触するパッド74を設ける。各噛合チェーン式伸縮装置42は、動力伝達チェーン78の回転により同期駆動され、全ての噛合チェーン58が環状ベース40の同一径方向に移動する。動力伝達系にリンクを用いていないので高い把持精度が得られる。分岐した噛合チェーン58は周方向に配置されたチェーン収納部70に収納されるので、径が大きくならずコンパクトにできる。
(もっと読む)
ロボットハンド装置
【課題】指機構の構造を簡単として軽量コンパクトに構成することができるロボットハンド装置を提供する。
【解決手段】手嘗部1と、指節部材7,9,11を関節軸6,8,10を介して連設してなる指機構2と、指節部材7,9,11を貫通する撓み自在の回転伝達軸18と、指節部材7,9,11の雌ねじ部15,16,17に螺合する雄ねじ部19,20,21と、回転伝達軸18を回転駆動するモータ25とを設ける。回転伝達軸18の回転により、指機構2の曲げ動作及び延ばし動作を行う。
(もっと読む)
ロボットハンド
【課題】簡素な構成でフィンガーが指根元から指先にかけて順に曲がる動作を実現する。
【解決手段】ロボットハンド1は、モータ31からの回転動力が入力される遊星歯車ユニット44と、遊星歯車ユニット44から出力される回転動力が伝達される第1及び第2駆動軸3,4と、第1及び第2駆動軸3,4に夫々駆動される第1及び第2関節9、12を有するフィンガーF1,F2と、を備え、遊星歯車ユニット44は、太陽歯車65と、太陽歯車65の外歯に噛み合う遊星歯車66と、遊星歯車66の公転に連動するように遊星歯車66に接続された遊星腕68と、遊星歯車66の自転に連動するように遊星歯車66の外歯に噛み合う内歯歯車67とを有し、太陽歯車65がモータ31に接続され、遊星腕68が第1駆動軸3に接続され、内歯歯車67が第2駆動軸4に接続され、内歯歯車67の運動抵抗を遊星腕68の運動抵抗よりも大きくする抵抗発生手段が設けられている。
(もっと読む)
ロボットハンド装置およびロボットハンドの把持方法
【課題】安価にて製造できるシンプルで堅牢な構成でありながら、形状や大きさの異なるワークであっても容易に把持することができるロボットハンド装置およびロボットハンドの把持方法を提供するを提供する。
【解決手段】ワークWを把持する複数の指2を本体3に回動自在に取り付けたロボットハンド装置1であって、各指2は、第1関節4において本体3に対して回動自在に支持される第1節5と、この第1節5に対して第2関節6において回動自在に支持される第2節7と、第1節5および第2節7を回動させる回転力を供給するモータ8と、このモータ8からの回転力を第1節5および第2節7に分配して伝達するデファレンシャル機構9とを備える。
(もっと読む)
電動ハンド
【課題】長方形や楕円形などの長短の長さのあるワークを正確に位置決め(センタリン
グ)できる電動ハンドを提供する。
【解決手段】カム部材として第1及び第2の2個のカム部材11B・12Bが同じ軸線上で重ねて軸支され、これら第1及び第2のカム部材のそれぞれにおいて一対のカム溝14・16が点対称に形成され、しかも第1及び第2のカム部材のカム溝14・16相互は、軸心からの距離が互いに異なっている。第1及び第2のカム部材の直径が異なり、大径の第2のカム部材12Bのカム溝16が、小径の第1のカム部材11Bの外周縁を越えるところに形成されている。
(もっと読む)
マニピュレータシステムおよびその制御方法
【課題】把持力等の作用力を安定に精度よく制御可能なマニピュレータシステムおよびその制御方法を提供する。
【解決手段】マニピュレータシステムの制御装置2は、把持開始推定オブザーバ51と、把持角度決定部52と、逆キネマティック行列演算部53と、PID制御部54と、モータ駆動部55と、目標把持角度設定部56と、最閉角度決定部57と、操作量更新部58とを有する。把持開始推定オブザーバ51は把持開始角度を推定し、推定した把持開始角度に基づいてグリッパ4の最閉角度を設定して、最閉角度に達するまでグリッパ軸角度を制御する。これにより、モータのトルク制御で把持力を制御する場合よりも、精度よくグリッパ4の把持力制御が可能となる。
(もっと読む)
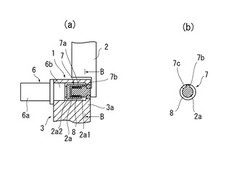
ロボットハンドの指関節駆動機構
【課題】回転位置に応じて必要とされるトルクおよび速度を得ることのできる小型でコンパクトなロボットハンドの指関節駆動機構を提案すること。
【解決手段】ロボットハンドの指関節駆動機構1は、回転アクチュエータ5と、この回転アクチュエータ5によって回転駆動する駆動側歯車6と、これにかみ合っている従動側歯車7と、従動側歯車7によって駆動される関節軸3とを有し、駆動側歯車6、従動歯車7が非円形歯車である。楕円歯車などの非円形歯車を用いることにより、1回転内の所定の有限回転角度範囲内において、両歯車の回転角度位置に応じて減速比が変化し、トルクが必要な指の動作部分では回転力伝達機構の最終減速比を大きくして大きな力で物の把持などを行うことができ、トルクが要らない指の動作部分では最終減速比を小さくして高速で指を動作させることができる。
(もっと読む)
ロボットハンドの指構造
【課題】ロボットハンドの指構造を効果的に小型化すること。
【解決手段】ロボットハンドの指構造10は、ロボットハンドの指付根部11の関節12を回転駆動する付根駆動部1と、指本体3の関節13を回転駆動する指本体駆動部2と、指本体3の長手方向に沿って配設され、相互に歯合する歯車列4と、を備えている。また、指付根部11の近傍には、付根駆動部1及び指本体駆動部2が併設されている。さらに、指本体駆動部2は、歯車列4を介して、指本体3の関節13を回転駆動する。
(もっと読む)
マニピュレータシステムおよびマニピュレータの制御方法
【課題】作用部の作用力を低下させずにアクチュエータの消費電力を低減でき、かつ構造を複雑化させずに済む。
【解決手段】マニピュレータシステムは、マスタスレーブ方式で動作するマニピュレータ本体1と、マニピュレータ本体1の駆動を制御する制御装置2とを備えている。制御装置2は、グリッパの把持力が一定になるまでモータ14cを駆動した後に、把持力が低下しない範囲でグリッパを開く方向にモータ14cを駆動するため、把持力を一定に維持したままモータ電流値を最大連続電流値以下に抑制することができ、消費電力の削減が図れるとともに、把持力が最大連続電流値により制限されるおそれもなくなる。
(もっと読む)
電動グリッパ装置
【課題】微妙かつ応答性の速い部品取り替え制御が可能であるとともに、製作が容易で、しかも、装置全体の力学的な安定性が高い電動グリッパ装置を提供する。
【解決手段】門形フレーム4の両側の垂直枠部4a・4b間に、中空体であるグリッパ旋回台5を軸支し、この中空のグリッパ旋回台内に第1及び第2の電動グリッパ6A・6Bのモータを設置する一方、これら第1及び第2の電動グリッパの開閉する把持部材68a・68bを、グリッパ旋回台の第1の外面と第2の外面とに、レール63と共に分けて装着し、このグリッパ旋回台を門形フレームに搭載された垂直旋回用モータ13にて垂直旋回させることにより、第1電動グリッパの把持部材と第2電動グリッパの把持部材とを、門形フレームに対して下向きとなる第1の位置と、これよりも上向きとなる第2の位置とに位置交換できるようにする。
(もっと読む)
把持フィンガあたり2本の駆動軸を備えた把持機構
本発明は、2本の駆動軸(5b、6)、クランク、歯車、鎖、ベルトまたは歯付ベルト軸によって動作機構(1、10a、10b、11b)に連結することによって動作させられる少なくとも1本の可動把持フィンガ(11b)を備えた、機械、ロボットおよび操作装置のための把持機構に関する。2つの被駆動レバー(10a、10b)によって把持フィンガ(11b)を動作させ、次に各々駆動軸によって駆動される結果として、経路またはその範囲を通して180°をこえる回転を通して把持フィンガ(11b)を動かして、したがって、ひっくり返るかまたは不安定な位置に入ることなく力およびトルクをしっかりと伝達することが可能である。本発明によれば、駆動軸(5b、6)は囲まれかつ一体的な把持ハウジング(1)内に完全に収容され、ほこりおよび汚れから保護され、かつ密閉して密封されるために、軸方向に少なくとも2つの部分に分けられる。駆動軸の異なる部分が、お互いに心出しされて、好ましくは穿孔およびピン(8)を備えたピニオン歯車の形で、軸方向歯部を用いて確実に接続される。駆動軸は、好ましくはキャリア支持軸受を有する。 (もっと読む)
マニピュレータおよびロボット
【課題】機構や制御アルゴリズムを単純にしつつも、様々な形状の物体を確実に把持することができるマニピュレータを提供する。
【解決手段】複数の関節軸111,112,113及び複数のリンク131,132,133を有し、複数の関節軸111,112,113の回転角が一定の関係を保つように複数のリンク131,132,133が連動して閉じる方向に動く指1と、指1と対向して配置され、複数の関節軸211,212,213及び複数のリンク211,212,213を有し、複数のリンク231,232,233のうち根元側のリンク231から順に閉じる方向に動き、且つ根元側のリンク231が物体に接触すると、根元側のリンク231に隣り合うリンク232が閉じる方向に動く指2と、指1及び指2を駆動する駆動源100,200を備える。
(もっと読む)
多関節指部材並びにロボットハンド及びその制御方法
【課題】共通の駆動源によって駆動される複数の関節を有する指部材にて、これら複数の関節の関節角度が任意の角度に設定された状態を作り出すことを可能とする。
【解決手段】多関節指部材2は、駆動モータ200と、駆動モータ200によって駆動される第1関節20と、第1関節20に一端が固定された第1リンク21と、第2リンク23と、第2リンク23を回動可能に第1リンク21の他端に結合し、第1関節20と共通の駆動モータ200によって駆動される第2関節22と、クラッチ機構212とを備える。ここで、クラッチ機構212は、第1関節20の駆動に要する駆動トルクの増大に応じて駆動モータ200から第1関節20への動力伝達を抑制するとともに、第1関節20への動力伝達が抑制された状態において第1関節20の駆動に要する駆動トルクが減少したことに応じて、即座に駆動モータ200から第1関節20への動力伝達を回復させる。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】ハンドを交換することなく特性の異なるワークを把持でき、しかも、ワークと周囲の物体との隙間が狭くても把持でき、さらに、ワークの供給姿勢が限定されないワーク把持装置を提供する。
【解決手段】ロボットは、ハンドでワークを把持する。このハンドは、ハンド本体と、4つのフィンガ部と、ハンド本体に設けられて4つのフィンガ部同士の相対的な姿勢および間隔を変化させるフィンガ部調整機構と、を備える。各フィンガ部は、フィンガ部調整機構に支持される第4テーブル21と、この第4テーブルに進退可能に設けられた棒状のフィンガ22と、を備える。
(もっと読む)
ロボットハンドおよびロボット
【課題】対象物を把持するロボットハンドによって溝状のインタフェースを操作する。
【解決手段】対象物を把持するロボットハンドに、掌部10と、掌部10から突出し、対象物を把持可能な一対のグリッパ51,52と、それらグリッパ51,52の間隔が変化するようにグリッパ51,52を移動させる開閉手段と、第1のグリッパ51の先端の第1の指先部55を押し込む直線運動によって第2のグリッパ52の先端の第2の指先部56を第1のグリッパ51に向けて回動するように駆動するリンク手段とを備える。リンク手段は、第1の指先部55に結合されたラック、そのラックにかみ合わされたピニオン、そのピニオンの回転を伝達するベルトなどを備える。
(もっと読む)
グラビア製版用ロボット
【課題】各処理工程における汚染の発生を防止し、かつ各処理工程におけるより迅速な処理作業が可能な新規なグラビア製版用ロボットを提供する。
【解決手段】基台と、該基台上に回転可能に載置された多軸ロボットアームと、該多軸ロボットアームの先端部に取付けられ、互いの間隔が広狭自在とされた相対向する第一サイドプレート及び第二サイドプレートと、該第一サイドプレート及び第二サイドプレートのそれぞれに取付けられ、かつ前記中央開口部を閉塞するように該中央開口部に挿入されることにより、前記中空シリンダロールを挟持するための第一挟持閉塞部材及び第二挟持閉塞部材と、第一挟持閉塞部材を回転させるための第一駆動手段と、第二挟持閉塞部材を回転させるための第二駆動手段と、を含むようにした。
(もっと読む)
多指多関節ロボットハンドおよびロボット
【課題】
省配線化することができるロボットを提供する。
【解決手段】
第1の指および第2の指を備え、前記第1の指および第2の指が複数の関節で構成される多指多関節ロボットハンドにおいて、前記第1の指または第2の指は、前記関節を回転させるための回転駆動手段を内蔵した第1の関節部と、所定の力以上の外力が加えられると当該外力に倣って回転する回転手段を備える第2の関節部と、を備える。
(もっと読む)
多指ロボットハンド
【課題】指機構の関節数が増大するのを抑制しつつ、多様な物品を安定して把持できる多指ロボットハンドを提供する。
【解決手段】根元関節12を介して3本の指機構2,3,4が連結された第1掌部8と、根元関節13を介して1本の指機構1が連結された第2掌部9と、第1掌部8と第2掌部9とを連結する掌関節10と、を備える。掌関節10は、第1掌部8に対する第2掌部9の連結角度が変わるのを許容するように構成されている。掌関節10、曲げ関節5、根元関節12の曲げ関節6、根元関節13は、何れも互いに平行な回動軸を有し、この回動軸回りの回動動作によって屈曲する。
(もっと読む)
1 - 20 / 40
[ Back to top ]