
Fターム[3C007HT23]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480) | ウォームギヤ (33)
Fターム[3C007HT23]に分類される特許
1 - 20 / 33
アクチュエータ装置およびこれを用いるロボット装置
【課題】定常的に大きな負荷が作用した場合にも効率を損なわず、柔軟な動作と周囲に対する安全を確保できるアクチュエータ装置を提供する。
【解決手段】ロボット装置やパワーアシスト装置の関節駆動に用いられるアクチュエータ機構において、選択的に駆動制御されるモータ11と、バネ要素20と、モータ駆動によりバネ要素の発生力および/またはその向きを変化させる変更機構と、バネ要素に接続された出力端22とを設けて構成する。一実施例の変更機構は、モータ駆動によって傾斜量が変化する傾斜レール16を具えるとともに、バネ要素は傾斜レールの傾斜方向へその角度に応じた力を発生し、これにより出力端が前記傾斜レールの角度に応じた力でその傾斜方向に付勢される。
(もっと読む)
ダブルアーム型ロボット

【課題】独立して2組の多関節アームの高さを変化可能なダブルアーム型ロボットを提供する。
【解決手段】第1及び第2の多関節アーム12、第1の多関節アーム11の一端が回動可能に連結される第1のアーム支持部16と、第2の多関節アーム12の一端が回動可能に連結される第2のアーム支持部17と、第1及び第2のアーム支持部17の第1及び第2の多関節アーム12と反対側の一端を鉛直方向に移動可能に保持しており、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12をそれぞれ回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12のハンド部23,33をそれぞれ回動させる第1及び第2の関節回動部と、第1及び第2のアーム支持部16,17を基柱14に対してそれぞれ独立して移動させる第1及び第2の上下駆動部とを備える。
(もっと読む)
ロボットアーム駆動装置
【課題】人工筋肉をアクチュエータとして利用したロボットアームの可動範囲を広げると共にアーム先端からの反力によるアクチュエータの故障を防ぐロボットアーム駆動装置を提供する。
【解決手段】プーリ201と、プーリに直結したリンク213と、ワイヤー207,208,211,212と、電動機202とを備えたロボットアーム駆動装置であって、ウォーム203と、ウォームホイール204と、ワイヤー巻き取りプーリ205,206と、ワイヤー案内機構214,215と、またワイヤーの途中には人工筋肉209,210を備え、前記電動機で前記ウォームを駆動し、前記ウォームの回転を前記ウォームホイールに伝達し、前記ウォームホイールのシャフトに前記ワイヤー巻き取りプーリを備え、前記ワイヤーの張力により、前記プーリを駆動する。ウォームギアは負荷側からのトルクが電動機に伝わりにくいので、電動機を壊す事がない。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で確実かつ精度良く変更することができ、しかもパイプ部としてのスピンドルガイド部が湾曲した状態でも姿勢変更させられて、全体構成がコンパクトな遠隔操作型アクチュエータを提供する。
【解決手段】 スピンドルガイド部3の先端に先端部材を姿勢変更自在に取付け、先端部材に工具を回転自在に設ける。スピンドルガイド部3の内部に、工具回転用駆動源41の回転をスピンドルに伝達する回転軸22と、姿勢変更用駆動源42で進退動作させられて先端部材を姿勢変更させる姿勢操作部材31とを設ける。姿勢変更用駆動源42の回転を減速する減速機構43と、減速された出力を回転運動から進退運動に変換する動作変換機構44Aと、この動作変換機構44Aの出力により姿勢操作部材31を進退動作させる出力部材51とを設ける。
(もっと読む)
チャック装置およびロボットアーム
【課題】ワークの搬送効率をより向上することができるチャック装置を提供すること。
【解決手段】チャック装置1は、チャック部10〜50を備える。チャック部10は、3つのチャック11を支持する支持板12が連結部材13によりギア14と連結されてなる。支持板12は、側板62にY方向に沿って上下に移動自在に支持されている。駆動側のギア82の回転によりギア87が回転すると、クランク機構である連結部材13により回転運動が直線運動に変換され、支持板12が上下に往復運動し、チャック11も上下に往復移動する。チャック部20〜50も同様である。チャック装置1は、隣り合うチャック部同士の往復方向における位置にずれが生じるように構成されている。例えば、チャック部20が前進すれば隣のチャック部10が後退する動作を行う。これにより隣り合うチャック部の間隔を広げなくてもチャックの数を増加してワークの搬送効率を向上できる。
(もっと読む)
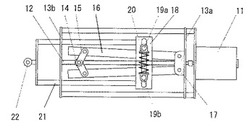
駆動装置
【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
可変剛性機構及びロボット
【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
多軸ロボット用の関節構造体およびこのような関節構造体を備えたロボット
【課題】3自由度を有する多関節型ロボットにおいて、小さなイナーシャとなるアーム関節構造を提案すること。
【解決手段】第一軸線Z1および第二軸線Z2に対して垂直な軸線X14,X24のいずれかを中心にしてプレート123,124に対して第一連接棒121の枢着部を制御している第三電動アクチュエータ23を備えている関節構造体において、第三アクチュエータ23が基部10上に、もしくはアーム11上に取り付けられている。
(もっと読む)
ダブルアーム型ロボット
【課題】簡易な構成と省スペースを実現できるダブルアーム型ロボットを提供する。
【解決手段】搬送物2,3が載置されるハンド部23,33、各々が関節部で回動可能に連結された複数のアーム21,22,31,32を有し、ハンド部23,33がアーム22,32の一端に関節部で回動可能に連結される、第1及び第2の多関節アーム11,12と、第1及び第2の多関節アーム11,12の一端が、基端の関節部によって各々回動可能に連結されるアーム支持部13と、アーム支持部13の一端を鉛直方向に移動可能に保持し、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12を基端の関節部で回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12における基端の関節部以外の関節部での回動を行わせる第1及び第2の関節回動部とを備える。
(もっと読む)
物品搬送用垂直多関節アーム機構
【課題】駆動源の出力トルクを拡大して重量物の搬送に対応可能垂直多関節アーム機構を提供する。
【解決手段】所定部材3に第1関節部10を介して連結され、該第1関節部10周りに鉛直面内を旋回可能な第1アーム11と、該第1アーム11に第2関節部20を介して連結され、該第2関節部20周りに前記鉛直面と平行な鉛直面内を旋回可能な第2アーム21と、前記第1関節部10に設けられ、前記第1アーム11を前記第1関節部10周りに旋回させる第1駆動機構51と、前記第2関節部20に設けられ、前記第2アーム21を前記第2関節部20周りに旋回させる第2駆動機構52と、を有した物品搬送用垂直多関節アーム機構1である。前記第1駆動機構51及び前記第2駆動機構52の少なくとも一方の駆動機構は、駆動源61と、該駆動源61から入力される回転動作に基づいて前記アーム11,21の旋回動作を作り出すカム機構とを備える。
(もっと読む)
多関節装置
【課題】不可避的な接触又は抗力に対して分離が可能な多関節装置を提供する。
【解決手段】多関節装置Mは複数の関節装置10を備える。関節装置10は、アーム1の一端部とアーム2の他端部とが可動自在に連結する。アーム1及び異なる関節装置10のアーム2が共有の軸心を有する。アーム1の他端面と異なる関節装置10のアーム2の一端面とが結合する。アーム1はN極を有する第1強磁性体4を他端面に備え、アーム2はS極を有する第2強磁性体5を一端面に備える。アーム1と異なる関節装置10のアーム2とは、第1強磁性体4と第2強磁性体5とが磁気結合する。又、アーム1と異なる関節装置10のアーム2とは、共有の軸心を屈折させる強い力が作用すると、第1強磁性体4と第2強磁性体5が分離する磁力で結合している。
(もっと読む)
パラレルメカニズム
【課題】 パラレルメカニズムの動作速度を低下させることなく、エンドエフェクタの動作範囲を拡大することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた電動モータ21に一端が接続され、他端がブラケット14に回転可能に支持され、電動モータ21によって回転駆動される旋回軸20と、該旋回軸20の他端に取り付けられ、旋回軸20の回転運動をベース部2の取付面2aに対して垂直な方向への直線運動に変換するエンドエフェクタ駆動機構30とを備える。エンドエフェクタ駆動機構30は、旋回軸20の他端に取り付けられたウォーム41と、該ウォーム41と噛合する一対のウォームホイール42,43と、該一対のウォームホイール42,43それぞれの軸部に連結され、ウォームホイール42,43の回転運動を直線運動に変換する閉リンク44とを有する。
(もっと読む)
アームの関節
【課題】低コストで軽量・コンパクトなアームの関節を提供する。
【解決手段】直交する2つの回転軸L1、L2周りに相対回転可能に連結された第1リンク1、第2リンク2と、第1リンク1側の回転軸である2本の差動入力軸5a、5bを独立駆動する駆動手段A、Bと、差動入力軸5a、5bの端部に固定され、駆動手段A、Bの駆動制御信号として、各軸の回転角度情報を計測する回転角度センサ30a、30bとを備えたアームの関節であって、駆動手段A、Bが、回転軸の並進方向と回転方向に移動自在に支持され、かつ所定の位置に弾性的に保持されたウォーム12a、12bと、それと係合する一対のウォームホイール11a、11bとを備え、アームの外部環境への衝突または接触による衝撃力を、弾性的に保持されたウォーム12a、12bの並進移動により吸収緩和し、回転角度センサ30a、30bの出力信号に基づき、衝突を検知する。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、アーム1と、アーム1の基端部が連結されてアーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着されて、前記複数本のテープ41を互いに結束する複数の結束部材5とを具え、前記複数本のテープ41は、1本の連続する帯状弾性資材46を折り畳んで構成され、帯状弾性資材46の一方の端部がアーム繰り出し装置2に巻き取られている。
(もっと読む)
電動グリッパ装置
【課題】微妙かつ応答性の速い部品取り替え制御が可能であるとともに、製作が容易で、しかも、装置全体の力学的な安定性が高い電動グリッパ装置を提供する。
【解決手段】門形フレーム4の両側の垂直枠部4a・4b間に、中空体であるグリッパ旋回台5を軸支し、この中空のグリッパ旋回台内に第1及び第2の電動グリッパ6A・6Bのモータを設置する一方、これら第1及び第2の電動グリッパの開閉する把持部材68a・68bを、グリッパ旋回台の第1の外面と第2の外面とに、レール63と共に分けて装着し、このグリッパ旋回台を門形フレームに搭載された垂直旋回用モータ13にて垂直旋回させることにより、第1電動グリッパの把持部材と第2電動グリッパの把持部材とを、門形フレームに対して下向きとなる第1の位置と、これよりも上向きとなる第2の位置とに位置交換できるようにする。
(もっと読む)
関節装置
【課題】1関節に2自由度を有し、確実な動作を実現するスリムな関節装置を提供する。
【解決手段】関節装置10は、アーム1の端部とアーム2の端部とが互いに可動自在に連結する。そして、第1交差歯車3と第3及び第4歯車13・14を備える。第1交差歯車3は、関節部1jに配置される。又、第1交差歯車3は、第1歯車31と第2歯車32が中心を共有する。第1及び第2歯車31・32は、平歯車となっている。第1歯車31と第2歯車32とは、十字状に交差している。第1歯車31と噛み合う第3歯車13がアーム1に設けられる。第2歯車32と噛み合う第4歯車14がアーム2に設けられる。第3歯車13を回転するとアーム2に対して、アーム1を可動できる。第4歯車14を回転するとアーム1に対して、アーム2を可動できる。
(もっと読む)
ロボットハンド
【課題】手掌部と指機構と親指機構を備えたロボットハンドであって、大きな物体から小さな物体まで安定して把持可能なロボットハンドを提供すること。
【解決手段】手掌部2と、該手掌部2の先端側領域Tに位置する主手掌部3から延設され前記主手掌部3の内側に向かって屈曲可能とされる指機構30と、前記手掌部の基端側領域に位置する中手部3と、前記中手部3に接続される親指機構40とを備え、前記親指機構40は、前記指機構30を屈曲させたときに前記指機構30が通る面と交差する方向に前記手掌部2の内側に向かって屈曲可能とされ、前記中手部4は、前記親指機構40を屈曲させたときに前記親指機構40が通る面と交差する方向に回動可能とされていることを特徴とする。
(もっと読む)
リハビリテーション教育用ロボット
【課題】二関節アーム装置の先端部において六方向の力を発生させるようにアクチュエータの駆動を制御することによって、人間の上肢又は下肢の筋出力と上肢又は下肢の先端の出力方向との関係を再現することができ、リハビリテーション施術訓練者が人間の上肢又は下肢の各筋の出力と上肢又は下肢の先端の出力方向との関係を体験的に学習することができるようにする。
【解決手段】所定の駆動シーケンスに従って第1〜第6アクチュエータを動作させ、第1リンクの先端部において六方向の力を発生させ、第1リンクの先端部において発生される力の方向が選択された方向となるように選択されたアクチュエータを動作させ、第1リンクの先端部を保持するリハビリテーション施術訓練者に第1リンクの先端部において発生される力の方向を体験させる。
(もっと読む)
マニピュレータ及びこれを用いた成膜装置
【課題】真空中で粉体を扱う環境でありながら、高い量産性を実現しうるマニピュレータ及びこれを用いた成膜装置を提供する。
【解決手段】第1部材と第2部材とが接触部を介して可動に接続され、該接触部及びその動作範囲が気密性を保持できるカバーで被包され、カバーは動作方向に伸縮可能であり、内側の気密領域と外部とが貫通孔で連通されているマニピュレータである。
上記マニピュレータを2つ以上組み合わせて成る多軸マニピュレータである。
上記マニピュレータ又は上記多軸マニピュレータ及び原料粉末供給・噴射手段を気密チャンバー内に配設し、マニピュレータ又は上記多軸マニピュレータが第1部材としてガイド、第2部材としてステージを備え、気密チャンバー内を減圧する機能を備えている成膜装置である。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、先端部に先端機構3を具えたアーム1と、該アーム1の基端部が連結されて該アーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、該テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着された複数の拘束部材5とを具え、該拘束部材5には、前記複数本のテープ41が貫通して該複数本のテープ41の相対位置を一定に保つためのガイド溝51が開設されている。
(もっと読む)
1 - 20 / 33
[ Back to top ]