
Fターム[3C007JT04]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361)
Fターム[3C007JT04]の下位に属するFターム
反力感知機能を有するもの (70)
主部と従部との対応関係を変更できるもの (8)
他に設定機能を有するもの (30)
マニピュレータ自身に装着するもの (67)
マニピュレータ自体を操縦桿とするもの (41)
人の動きをそのまま実現するもの (48)
Fターム[3C007JT04]に分類される特許
21 - 40 / 97
手術用マニピュレータ及び手術用マニピュレータシステム
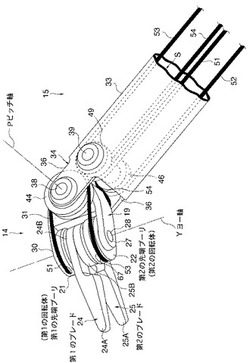
【課題】 少ないアクチュエータの数でワイヤの張力調整を行うこと。
【解決手段】 手術用マニピュレータ11は、その先端側でピッチ方向に回転可能な支持体19と、ヨー方向にそれぞれ独立して回転可能となるように支持体19に支持された第1及び第2の先端プーリ21,22と、プーリ21,22にそれぞれ一体化された第1及び第2のブレード24,25と、第1のプーリ21に固定された第1及び第2のワイヤ51,52と、第2のプーリ22に固定された第3及び第4のワイヤ53,54と、第1〜第4のワイヤ51〜54を押し引きする第1〜第4のモータ56〜59とを備えている。第1及び第2のワイヤ51,52は、引張力が作用したときに、相反する方向に第1の先端プーリ21を回転させ、第3及び第4のワイヤ53,54は、引張力が作用したときに、相反する方向に第1の先端プーリ22を回転させる。
(もっと読む)
医療用マニピュレータ、及びその初期化方法

【課題】医療用マニピュレータの駆動部側と作業部側の位置関係の初期化を容易にする。
【解決手段】作業部11が新規装着された場合には、各カウンタ45b〜47bをリセットして、原点位置に対応する「0」とする。1回の手術中で作業部11が再装着された場合には、前回の分離時に復帰メモリ49に保存した各カウンタ45b〜47bのカウント値を読み出して、これをそれぞれセットする。新規装着か再装着かは、作業部11に設けられたシリアル表示部29に表示されるシリアル番号から判断する。
(もっと読む)
ロボットシステム
【課題】カメラ、制御装置および通信手段の能力に依存することなく、ロボットに搭載されたカメラの正確な位置合わせが容易なロボットシステムを提供する。
【解決手段】画像合成部36は、記憶部34に記憶されている平面画像データ40に基づいて合成画像55を作成する。そのため、カメラ19、制御装置12あるいは通信部13の能力によって撮影している画像と表示している画像との間に時間差が生じるときでも、操作者30は表示部37に表示されている合成画像55を参照してロボット11を操作可能である。データ更新部38は、新たな平面画像データ40のための記憶領域が不足するとき、記憶部34のデータグループのうち属する平面画像データ40の数が最も多い最多データグループ62を選択し、この最多データグループ62から合成画像55の作成のために選択された選択時刻が最も古い平面画像データ65を削除する。
(もっと読む)
遠隔操作型アクチュエータ用ナビゲーションシステム
【課題】 外郭がパイプ状で細長形状のスピンドルガイド部の先端に設けられた工具支持用の先端部材の姿勢を遠隔操作で変更できる遠隔操作型アクチュエータに対し、その工具の位置を推定するナビゲーションシステムを提供する。
【解決手段】 遠隔操作型アクチュエータ5は、スピンドルガイド部3の先端に姿勢変更自在に取付けられた先端部材2と、この先端部材2に回転自在に支持された工具1とを備える。ナビゲーションシステムは、工具用マーカに対する工具1の加工部の相対位置を記憶する工具・工具用マーカ相対位置記憶手段54と、先端部材2の回動角度毎に、本体用マーカ7Aに対する工具用マーカの相対位置および姿勢を記録した相対関係記憶手段55と、実操作時の本体マーカ7Aの姿勢および位置、並びに先端部材2の回動角度とから、工具加工部位置推定手段56が工具1の加工部の位置を推定する。
(もっと読む)
モーション制御用指令システム、モーション制御用指令方法およびモーション制御システム
【課題】 安価で簡単な低速通信を使って段差なく滑らかな制御を実現でき、高速通信の場合と同等以上の制御性能を発揮できるモーション制御用指令システムを提供すること。
【解決手段】 モーション制御用指令システム1は、マスター制御装置2からその受信先装置であるスレーブ制御装置4に制御指令データCDを伝達するためのマスター制御装置2搭載のデータ送信手段3と、スレーブ制御装置4搭載のデータ受信手段5と、両制御装置2、4を結ぶデータ伝送経路8とからなり、制御指令データCDと同時にその処理に要すべき時間のデータ、つまり制御指令更新周期データTDも通信されるように形成されたシステムである。補間周期データTDはマスター制御装置2においてその都度生成され、制御指令データCDと一緒にスレーブ制御装置4側に送信される。
(もっと読む)
グリッパ及びマニピュレーションシステム
【課題】取り扱う対象物の変形を抑制すること。
【解決手段】グリッパ1は、基部6と、基部6に取り付けられる温度調整手段2と、温度調整手段2に取り付けられる対象物保持部4と、対象物保持部4に設けられる温度応答性ポリマー5と、温度応答性ポリマー5の温度を検出する温度検出手段3とを含む。温度応答性ポリマーは、温度に応答して構造を変化させる高分子材料であり、ポリ(N−イソプロピルアクリルアミド)が用いられる。温度調整手段2は、温度応答性ポリマー5の温度を変化させることにより、グリッパ1が保持する対象物を対象物保持部4に保持し、又は前記対象物を対象物保持部4から解放する。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができ、その工具の姿勢変更を手元操作で容易に行える遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部3の基端が結合され手により保持可能な駆動部ハウジング4aとを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、スピンドル13に回転を伝達する回転軸22と、ガイド孔30a内を進退して先端部材2の姿勢を変更させる姿勢操作部材31とを有する。姿勢操作部材31は、姿勢変更用駆動源で進退させる。この姿勢変更用駆動源に動作指令信号を出す姿勢変更操作具53を、駆動部ハウジング4aの外部に設ける。姿勢変更操作具53は、駆動部ハウジング4aを保持する手で入力操作可能とする。
(もっと読む)
手術マニピュレータシステム
【課題】目標となる操作点への処置具の移動を簡易かつ迅速に行うことができ、術者にかかる負担を低減する。
【解決手段】患者Aの術部を抑えるスタビライザ9を先端に備えるスタビライザ用マニピュレータ4と、該スタビライザ用マニピュレータ4により抑えられた術部を処置する処置具10を先端に備える1以上の操作用マニピュレータ5と、これらマニピュレータ4,5を制御する制御装置6とを備え、スタビライザ用マニピュレータ4および操作用マニピュレータ5が、相互に対応づけられた座標系を有し、スタビライザ用マニピュレータ4に備えられたスタビライザ9に処置すべき目標位置の位置座標が固定され、制御装置6は、術部にスタビライザ9が配置されて術部が抑えられたときに、スタビライザ9に固定されている目標位置近傍に処置具10を配置するように操作用マニピュレータ5を制御する手術マニピュレータシステム1を提供する。
(もっと読む)
マニピュレータシステムおよびその制御方法
【課題】把持力等の作用力を安定に精度よく制御可能なマニピュレータシステムおよびその制御方法を提供する。
【解決手段】マニピュレータシステムの制御装置2は、把持開始推定オブザーバ51と、把持角度決定部52と、逆キネマティック行列演算部53と、PID制御部54と、モータ駆動部55と、目標把持角度設定部56と、最閉角度決定部57と、操作量更新部58とを有する。把持開始推定オブザーバ51は把持開始角度を推定し、推定した把持開始角度に基づいてグリッパ4の最閉角度を設定して、最閉角度に達するまでグリッパ軸角度を制御する。これにより、モータのトルク制御で把持力を制御する場合よりも、精度よくグリッパ4の把持力制御が可能となる。
(もっと読む)
関節駆動装置、および多関節アーム装置
【課題】作動ロッドに作用する横荷重を受ける構造とすることによって円滑な作動を確保し、さらには、小型化を図り得る、関節駆動装置を提供する。
【解決手段】関節駆動装置10は、対をなす第1と第2のフレーム31、32に回動自在に接続されたアーム部材40と、アーム部材を揺動させるアクチュエータ70と、を含んでいる。アクチュエータは、アーム部材に取り付けられるシリンダチューブ71を備える駆動部Dと、駆動部によってシリンダチューブの軸線方向に沿って移動するシリンダロッド73と、基端部が第1のフレームに回動自在に接続され、シリンダロッドに対して傾斜して伸びるリンク部材80と、シリンダロッドに連結されるとともにリンク部材の先端部が回動自在に接続されたガイド部材90と、を有している。駆動部は、流体圧によってピストン72を移動し、ピストンに取り付けたシリンダロッドを移動させている。
(もっと読む)
遠隔操作支援装置
【課題】
対象物の位置や姿勢が事前に判らない場合においても、任意の方向から対象物を確認することを可能としつつ、対象物の遠隔操作を支援することが可能な遠隔操作支援装置を提供することである。
【解決手段】
各対象物の形状の計測データを三次元認識処理し、各対象物の形状および姿勢が反映された各対象物モデル表現を生成し、ロボットの各軸の状態が反映されたロボットモデル表現を生成し、三次元空間の指定された視点および視線方向による対象物モデル表現およびロボットモデル表現を画面上に三次元的に表示し、各対象物上の点を基準座標系の三次元座標に変換し、ロボット上の点を前記基準座標系の三次元座標に変換し、画面上に表示された前記各対象物モデル表現から一の対象物を選択し、選択された操作対象物と前記ロボットとに基づき、前記三次元画像生成手段における視点および視線方向を自動で指定する。
(もっと読む)
遠隔操縦装置
【課題】
操縦者が異常状態、操縦者が不測の状態になった場合に、ロボットを確実に非常停止、或は異常回避動作を行わせることができる遠隔操縦装置を提供する。
【解決手段】
遠隔制御用のコマンドを発する携帯用の遠隔操縦装置1であって、状態異常検出手段6,7と、該状態異常検出手段の検出結果に基づき、作動停止用のコマンドを作成する制御演算部8と、前記コマンドを送信する遠隔装置用通信部9を具備した。
(もっと読む)
医療用マニピュレータ及び実験装置
【課題】可撓性部材の張力を簡便且つ適切に判断する。
【解決手段】医療用マニピュレータ10は、モータ40a〜40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a〜40cに接続されるプーリ50a〜50cを備える接続部15と、接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a〜54cを介してプーリ50a〜50cに連動する先端動作部12と、ワイヤ54a〜54cの途中に介装され、歪みゲージ404aが設けられた張力検出片400とを有する。張力検出片400は、連結シャフト48の延在方向に長尺な板体であり、長尺方向両端部にワイヤ54a〜54cをかけるフック406を有する。
(もっと読む)
張力検査装置
【課題】可撓性部材の張力を簡便且つ正確に検査する。
【解決手段】医療用マニピュレータ10は、連結シャフト48の一方の側に設けられたモータ40a〜40cの回転軸から、所定張力で張られたワイヤ54a〜54cを介して、連結シャフト48の他方の側に設けられた先端動作部12を動作させる。連結シャフト48の側面には開閉可能な検査孔404が設けられている。張力検査装置400は、ワイヤ54a〜54cを順に自動的にはじいて振動させる爪部412a〜412cと、ワイヤ54a〜54cの振動を検出するマイクロホン414と、マイクロホン414によって検出された振動から求められる張力Tが適正範囲であるか否かを判断して所定の出力をする張力判断部434とを有する。
(もっと読む)
医療用マニピュレータ
【課題】医療用マニピュレータの動作状態をモニタ画面上で確認可能にする。
【解決手段】医療用マニピュレータ10は、モータ40a、40b、40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a、40b、40cの回転軸に接続されるプーリ50a、50b、50cを備える接続部15と、該接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a、54b、54cを介してプーリ50a、50b、50cに連動する先端動作部12と、アクチュエータブロック30の接続面30aに設けられたLED103と、連結シャフト48内に設けられ、LED103の光を先端動作部12の近傍部まで導く光ファイバ49とを有する。
(もっと読む)
医療用マニピュレータ
【課題】可撓性部材の寿命を簡便且つ適切に判断する。
【解決手段】医療用マニピュレータ10は、モータ40a〜40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a〜40cの回転軸に接続されるプーリ50a〜50cを備える接続部15と、接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a〜54cを介してプーリ50a〜50cに連動する先端動作部12と、モータ40a〜40cのトルクTを検出する電流センサ118と、コントローラ27とを有する。コントローラ27は、トルクTと駆動力閾値A1、A2とを比較し、トルクTが駆動力閾値A1、A2を超える部分について過トルク積算値Xを求め、過トルク積算値Xが第1積算閾値B1及び第2積算閾値B2を超えたときに所定の対応処理を行う。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、作業者の労力を軽減する。
【解決手段】マスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、マスターアーム10は、自由度7以下の腕部11、ハンド部20及び先端の位置が検出可能な自由度8以上の紐状センサ17を有する。作業者Pがマスターアーム10に動作を入力する動作入力部は、マスターアーム10のハンド部20に設けられている。
(もっと読む)
入力インタフェース
【課題】手軽で直感的な操作が可能な入力インタフェースを提供する。
【解決手段】
透明弾性体からなる筒状体と、筒状体の壁内に周方向及び長さ方向に沿って埋設した複数のマーカと、筒状体の中空部内に設けた凸面ミラー及び撮影手段と、を備え、前記撮影手段と前記凸面ミラーは、前記撮影手段が、前記凸面ミラーの反射像を撮影することで、前記複数のマーカを撮影するように構成されている、入力インタフェース用の力入力デバイス。
(もっと読む)
位置・力再現方法および位置・力再現装置
【課題】接触と非接触を繰り返す動作をデータとして保存し、再現することができる位置・力再現方法および位置・力再現装置を提供する。
【解決手段】時系列な位置情報と力の接触情報を取得する手段であるアクチュエータ201と、取得した位置情報と力の接触情報を解析処理する制御部203と、解析処理結果を保存する記憶手段204とを備え、保存した解析処理結果により前記位置情報と力の接触情報を再現する。これにより接触時と非接触時の位置・力の双方の再現を実現でき、接触−非接触を繰り返すような動作を保存・再現させることができ、操作者Aの位置と力の双方を再現することができ、時間と空間を越えて操作者Aの動作を再現することができる。
(もっと読む)
マニピュレータシステム
【課題】操作性の向上されているマニピュレータシステムを提供する。
【解決手段】マニピュレータシステムは、被操作部46、及び、被操作部46を移動させる移動機構を有するマニピュレータ42dと、被操作部46を粗動させるための操作入力が可能な粗動操作装置53と、被操作部46を微動させるための操作入力が可能な微動操作装置56であって、感圧面部59を有し、感圧面部59は感圧面部59への圧力負荷位置を検知可能である、微動操作装置56と、粗動操作装置53への操作入力に追従して被操作部46が移動されるように移動機構を制御すると共に、感圧面部59への圧力負荷位置の変化に被操作部46の位置の変化が対応するように移動機構を制御する制御装置37と、を具備することを特徴とする。
(もっと読む)
21 - 40 / 97
[ Back to top ]