
Fターム[3C007JT04]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361)
Fターム[3C007JT04]の下位に属するFターム
反力感知機能を有するもの (70)
主部と従部との対応関係を変更できるもの (8)
他に設定機能を有するもの (30)
マニピュレータ自身に装着するもの (67)
マニピュレータ自体を操縦桿とするもの (41)
人の動きをそのまま実現するもの (48)
Fターム[3C007JT04]に分類される特許
61 - 80 / 97
ロボットの操縦システム
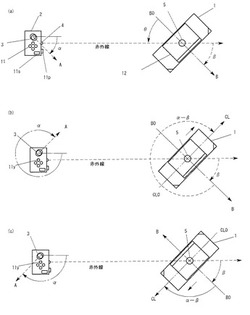
【課題】ロボットの操縦で左右で対称的な動作を定義しておき、これを選択することによって操縦する場合が多いが、ロボットは始終向きを変えるため、どちらが左でどちらが右か直感的にはわからないことが多い。そのために操縦が難しくなり、もたもたすることになって素早い操縦ができなくなる。
【解決手段】ロボットの向きβを検出できる手段を設け、操縦器にはジョイスティックを設ける。動作を選択し、ジョイスティックを動作させたい側に倒すことで方向角αが得られる。αーβの値を使って左右のどちらであるかを決定し、ロボットに動作をさせる。操縦者は動作をさせたい側をジョイスティックで指示すればよいだけなので素早く、間違いの無い操縦ができる。
(もっと読む)
ロボット制御装置及びロボットの位置指令値修正方法

【課題】マスタ−スレーブ間でロボットの動作に位置ずれが発生した場合の修正を、可動部に過大な負荷をかけることなく行うことができるロボット制御装置を提供する。
【解決手段】スレーブ側のコントローラ11Sは、マスタ側のコントローラ11Mにより、ロボット本体12Sのアーム先端の移動目標位置指令値が与えられると、当該指令値とそれ以前に与えられているものとを含む連続した3点の指令値P1,P2,P3について、各指令値の座標間を結ぶ線分L1,L2に接すると共に、時系列順が最初となる線分L12には中点P12で接する2次曲線式Yを求め、求めた曲線式Yにより、ロボット本体12Sに対して次回に適用する指令値を修正する。
(もっと読む)
マスタ・スレーブ式マニピュレータシステム
【課題】マスタ・スレーブ式マニピュレータシステムにおいて、モニタや操作入力装置の配置に制限がない簡単な構成で、直感的な操作を可能とすること。
【解決手段】マスタ・スレーブ式マニピュレータシステム1は、マニピュレータ134、カメラ146、モニタ152、操作入力装置100、マニピュレータコントローラ122、マスタコントローラ104を備える。マスタコントローラ122は、操作入力装置100による指示に基づいて操作指令情報を取得する操作指令情報取得部106と、操作指令情報を位置移動指令情報と姿勢指令情報とに分離する取得情報分離部110と、姿勢指令情報に基づいて位置移動指令情報を補正して位置移動指令補償情報を出力する移動方向補償コントローラ116とを備える。マニピュレータコントローラ122は位置移動指令補償情報及び姿勢指令情報に基づいてマニピュレータ134の位置姿勢を制御する。
(もっと読む)
マニピュレータ
【課題】作業部の複合動作の操作が容易で、術者の感覚に合った容易な操作性を有するマニピュレータを提供する。
【解決手段】マニピュレータは、人手で把持される操作指令部14と、該操作指令部14に設けられ、指で操作される複合入力部34と、操作部から延在する連結シャフト48と、該連結シャフト48の先端に設けられた作業部12とを有する。作業部12は、ヨー回動機構、ロール回転機構及び開閉機構を有する。複合入力部34は、ロール回転機構を駆動するシャトルリング100と、ヨー回転機構を駆動するパッド132とを有する。シャトルリング100は、パッド132の全体を囲い、且つパッド132の中心点に相当する軸線に対して同軸状に配置されている。
(もっと読む)
ロボット制御システム
【課題】オペレータの意図通りに移動ロボットを操縦することが容易となるロボット制御システムを提供する。
【解決手段】オペレータがコントローラを操作することによって移動ロボットを操縦するロボット制御システムであって、コントローラは、移動ロボットに動作命令を入力する手段と、オペレータに移動ロボットの制御状態を表示する表示手段を有しており、移動ロボットは、本体と、本体を移動させる手段と、移動ロボットの姿勢状態を検出する手段と、コントローラから入力された動作命令に基づいて移動ロボットの姿勢状態の目標値を決定する手段と、移動ロボットの姿勢状態が決定された目標値が示す状態となるように移動手段を制御する手段と、検出手段が検出した姿勢状態と目標値との差分値を算出する手段とを有しており、表示手段は移動ロボットが算出した差分値に基づいた指標を表示する。
(もっと読む)
中空の解剖学的に懸吊された器官の手術のためのシステム、装置、及び方法
中空の解剖学的に懸吊された器官の手術のためのシステム、装置、及び方法を提供する。中空の解剖学的に懸吊された器官の手術のためのシステム、装置、及び方法を本明細書に説明する。一部の実施形態では、眼科手術のための遠隔ロボット顕微鏡手術システムは、遠隔ロボットマスター及びスレーブ混成ロボットを含み、遠隔ロボットマスターは、医療専門家によって制御される少なくとも2つのマスタースレーブインタフェースを有し、スレーブ混成ロボットは、患者の頭部に取外し可能に取り付けられるフレームに取り付けられた少なくとも2つのロボットアームを有し、少なくとも2つのロボットアームの各々は、並列ロボット及び直列ロボットを有し、直列ロボットは、カニューレを収容するチューブを含む。 (もっと読む)
多関節構造体、それを用いた装着具、システムおよびヒューマンマシンインターフェース
【課題】多関節構造体の長さを手動で任意に変更可能とする。
【解決手段】本発明の多関節構造体は、各関節間の連結部にポテンショメータ等の変化量検出センサが設けられ、1ないし複数のセンサをグループ単位とし、前記グループ単位に前記センサの信号が信号処理部に取り込まれ、前記信号処理部間は通信ネットワークに接続され、前記通信ネットワークに接続された処理演算部が、前記センサの信号データに基づいて演算処理する多関節構造体において、前記多関節構造体の形状が変形した際に、前記関節間の連結部の変化量をリアルタイムに検出し、前記関節の並進、回転移動した際の移動量及びベクトルを出力する構成とされる。
(もっと読む)
サーボマニピュレータの着脱装置
【課題】伸縮自在なサーボマニピュレータの着脱装置に関する。
【解決手段】作業者が操作するマスターサーボマニピュレータと、前記マスターサーボマニピュレータの信号が伝達されて作業環境にて前記マスターサーボマニピュレータの動きを模写するスレーブサーボマニピュレータと、前記マスターまたは/およびスレーブサーボマニピュレータに備えられ、前記サーボマニピュレータを伸縮自在な伸縮装置から分離または結合する着脱装置と、を含み、前記着脱装置は、円錐状の結合突起が結合穴に結合した後、前記結合突起が離脱しないように結合穴が形成された回転板が回転して前記結合突起が係止するように形成されたことを特徴とする。
(もっと読む)
双腕作業機械
【課題】左右の作業フロントの干渉による作業フロントの破損を防止することができる双腕作業機械を提供する。
【解決手段】運転室4を備えた上部旋回体3の前部に設けた左右のスイングポスト7a,bに、それぞれ上下に揺動自在に左右の作業フロントA,Bを設けた双腕作業機械において、作業フロントA,Bの角度差及び操作装置からの指令信号に基づき、スイングポスト7a,bを旋回動作させる出力信号を生成する干渉防止制御部を備え、この干渉防止制御部は、作業フロントA,Bが接触し得る角度差の範囲を干渉危険領域、この干渉危険領域に連続する設定の角度差の範囲を準干渉危険領域と定義した場合、作業フロントA,Bの角度差が準干渉危険領域にあって作業フロントA,Bが相対的に近付くとき、スイングポスト7a,bを旋回動作させる出力信号を減少させ他方の作業フロントに向かって旋回する作業フロントの旋回動作を減速させる。
(もっと読む)
ロボット機器システム
一実施例においては、ロボット機器システムがコントローラと通信する、マスタ入力デバイスと機器ドライバとを具え、前記機器ドライバはガイド機器インタフェースを有し、当該ガイド機器インタフェースは少なくとも部分的に、前記マスタ入力デバイスにより生成され、前記ガイド機器インタフェースと機能的に連結するガイド機器を操作するための制御信号に応答する、1又はそれ以上のガイド機器駆動要素を具えている。マスタ入力デバイスはリンケージアセンブリと連結したオペレータインタフェースを含み、前記オペレータインタフェースとリンケージアセンブリとの間に挿入された1又はそれ以上のロードセルを有し、前記マスタ入力デバイスによって生成された制御信号は前記リンケージアセンブリと関連する前記オペレータインタフェースの移動に応じて、1又はそれ以上のロードセルによって生成された出力信号に少なくとも一部分は基づいている。 (もっと読む)
マニピュレータの移動構造及び手術支援ロボット
【課題】 MRIのガントリ内のようにアームの可動高さが制約された空間内でも、マニピュレータのピボット運動を行えるようにすること。
【解決手段】駆動装置11とロボット本体12とを備えて手術支援ロボット10が構成されている。ロボット本体12は、ほぼ水平方向に動作する第1及び第2アーム36,37を備えている。第2アーム37には、その先端側に設けられたジンバル機構48と、このジンバル機構48に支持されるとともに、マニピュレータMがその軸線方向に移動可能に保持されるスライダー49とを備えている。ジンバル機構48は、アーム36,37の動作に応じて、スライダー49を介してマニピュレータMの姿勢を変化させ、スライダー49は、マニピュレータMの姿勢の変化に伴って、その先端の高さ位置がほぼ一定となるように、マニピュレータMを軸線方向に移動させる。
(もっと読む)
制御システム、記録システム、情報処理装置および方法、プログラム、並びに記録媒体
【課題】制御における通信や処理の遅延や環境の変化に対する耐性を向上させ、制御の負荷や破綻を抑制することができるシステムを提供すること。
【解決手段】ユーザは、スレーブ13と幾何形状が同一のロボットのマスタ12を操作し、制御装置11を介してスレーブ13を制御する。制御装置11は、マスタ12の操作により生成されるスレーブ13に対する制御コマンドを、その制御コマンドの生成タイミングにおいてスレーブ13より供給されるセンサ情報とともに、システム内に生じる制御遅延を含む形で記録する。制御装置11は、その制御コマンドとセンサ情報とに基づいて、制御遅延を考慮した時系列的に先の制御コマンドを予測し、その制御コマンドによりスレーブ13を制御する。本発明は、情報処理システムに適用することができる。
(もっと読む)
5バーリンク球面機構を有するロボットアーム
基盤リンク(1105)と、2つの内部リンク(1101、1104)と、2つの外部リンクとを有する並列の球面5バーリンク機構(1100)を有するロボットアーム。各内部リンクは、回転軸(1112、1113)において基盤リンクと連結され、回転軸から離間して配置された中間軸(1111、1114)を有する。各外部リンクは、中間軸において、内部リンクの1つと枢動可能に連結される。2つの外部リンクは、外部軸(1115)において共に枢動可能に連結される。リンク間の最大角度が実質的に180°未満となるように、連結された内部リンクの中間軸の回りにおける外部リンクの第1のリンクの回転が制約部によって制限される。2つの中間軸が、外部軸および回転軸の1つを含む平面の同じ側にあるように、外部リンクの第2のリンクおよび連結された内部リンクは、構成され組み立てられる。  (もっと読む)
(もっと読む)
マニピュレータの形状制御システム及び形状制御装置
【課題】多関節構造のマニピュレータを簡単な操作で所望の形状にすること。
【解決手段】 複数の形成部材M1〜M5を相互に屈曲自在に連結してなる多関節型のマニピュレータ11と、各形成部材M1〜M5を独立して屈曲させる動力となるアクチュエータ12と、アクチュエータ12の駆動を制御してマニピュレータ11を所定の形状にする形状制御装置14と、形状制御装置14に対してマニピュレータ11の形状を指令する操作装置13とを備えて形状制御システム10が構成されている。形状制御装置14は、仮想円Sを使ってマニピュレータ11の目標形状を決定する演算部41を備え、この演算部14は、マニピュレータ11が、その基端側の基準点Oから先端側に向って、仮想円Sの円周上の接点Pまで直線状に延びた後で円周に沿って屈曲する目標形状とする。操作装置13は、仮想円Sの位置及び大きさを任意に指定可能に設けられる。
(もっと読む)
操作ロボットにより物体を把持するための知的インターフェース装置及びこの装置の操作方法
本発明は、物体を入力するための知的インターフェース装置に関し、本装置は、自由端にクランプ(21)を有し、一つ以上のカメラ(22)が装着されたヒンジ式アーム(20)を備える操作ロボットと、表示画面(25)と入力ユニット(24)とを備えるコンピュータ(23)と、前記クランプを制御する手段と、前記カメラが取得した物体のビデオ画像を前記表示画面に表示する手段と、入力ユニットを使用して画像内の物体を囲む選択領域を図形により特定する手段とを備える。本発明はこの装置を操作する方法にも関する。 (もっと読む)
ロボット制御システム
【課題】遠隔操作の効率性や安全性を向上できるロボット制御システムを提供する。
【解決手段】ロボット制御システムは、たとえば自律制御可能なコミュニケーションロボットを遠隔操作するための操作用コンピュータおよび当該ロボットの存在する環境に設置されたセンサを含む。操作用コンピュータにはセンサ情報画面が表示される。センサ情報画面には、環境センサによって検出された情報、つまり、カメラ画像、騒音レベル、距離センサ情報等が表示される。さらに、ロボットの存在する環境の地図が表示され、当該地図上には、たとえば、環境の無線タグリーダの検出情報から算出されるロボットの現在位置とともに、環境カメラの差分画像に基づいて算出される混雑領域や、騒音計の測定情報から算出される煩い領域等、当該環境における注意情報が表示される。
(もっと読む)
操作訓練装置
【構成】ロボット20は、教師側ジョイスティック12bの操作に対応する動きを示す。かかるロボット20のリアルタイム画像は、生徒ST用のモニタ14c上の或るウィンドウに表示される。教師側ジョイスティック12bの姿勢と生徒側ジョイスティック14bの姿勢とを示すガイド情報は、ロボット20のリアルタイム画像の表示処理に関連して、モニタ14c上の別のウィンドウに表示される。生徒STの習熟度は、教師側ジョイスティック12bおよび生徒側ジョイスティック14bの姿勢の相違に基づいて算出される。算出された習熟度Mは、モニタ14cに表示されるとともに、教師TC側の通信端末12に向けて送信される。
【効果】生徒の操作能力を客観的かつ正確に評価することができる。
(もっと読む)
コニュニケーションシステム
【課題】ペット型ロボットの動作を、単調で物足りなくならないような、しかも連帯感の持てる感情のこもった、動作とすることにより、良好なコミュニケーションが取れるコミュニケーションシステムを提供する。
【解決手段】一方のコミュニケーション装置で行われた操作者の動作を、他方のコミュニケーション装置に伝達するコミュニケーションシステムにおいて、一方のコミュニケーション装置1は、操作者の動作を検出する動作検出手段4と、動作検出手段4で検出された操作者の動作に応じて感情信号を生成し保持する感情生成手段5と、感情信号を他方のコミュニケーション装置3に送信する送信手段6と、他方のコミュニケーション装置3から送信された感情信号を受信する受信手段7と、感情信号を表示部に出力する情報出力手段8と、を備える。
(もっと読む)
ロボットの制御方法及び制御装置
【課題】ロボット全体の動作を容易に、また、高速で制御可能な、ロボットの制御方法及びその装置を提供する。
【解決手段】ロボット(50)が取り得る姿勢から複数の姿勢(As〜Cs)が選択され、この複数の姿勢(As〜Cs)それぞれを特定する変数の組(A〜C)が座標(51a〜51c)と関連づけられてなる2次元マップ(51)から、任意に座標を読み出す座標読み出しステップと、読み出された座標に対応した変数の組(A〜C)で特定される姿勢(As〜Cs)をとるようロボット(50)に対して指示するステップと、を有する。
(もっと読む)
位置指示方法とこの方法を実現するための指示装置及びプログラム
【課題】特殊な検出デバイス群を使用することなく指示者のジェスチャによる指示をロボットに伝達できるようにする。
【解決手段】先ず携帯端末MSのディジタルカメラ2によりペットロボットPRを撮像してその画像データからQRコードの座標値を検出し、この座標値をもとに携帯端末MSとペットロボットPRとの相対位置(第1相対位置)及び姿勢(第1姿勢情報)を算出する。次に携帯端末MSを目標点TGに向けてこのときの姿勢(第2姿勢情報)を姿勢センサ5により検出し、この姿勢情報をもとに携帯端末MSと目標点TGとの相対位置(第2相対位置)を算出する。最後に、上記第1及び第2の相対位置と第1及び第2の姿勢情報をもとに、ペットロボットPRから見た目標点TGの相対的な位置関係(目標相対位置)を算出し、この目標相対位置をもとにペットロボットPRを目標点TGに移動させる。
(もっと読む)
61 - 80 / 97
[ Back to top ]