
Fターム[3C007JT04]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361)
Fターム[3C007JT04]の下位に属するFターム
反力感知機能を有するもの (70)
主部と従部との対応関係を変更できるもの (8)
他に設定機能を有するもの (30)
マニピュレータ自身に装着するもの (67)
マニピュレータ自体を操縦桿とするもの (41)
人の動きをそのまま実現するもの (48)
Fターム[3C007JT04]に分類される特許
81 - 97 / 97
操作装置
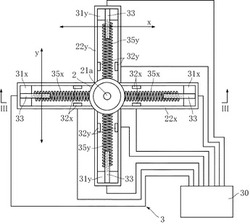
【課題】より多くの自由度について同時に操作することができるとともに、使用者の疲労感を低減することが可能な操作装置を提供すること。
【解決手段】互いに直交する方向xおよび方向yのそれぞれに沿って独立して並進可能なスティック2と、スティック2の方向x並進量および方向y並進量を独立して検出可能な検出手段3と、を備える操作装置A1であって、スティック2は、方向xおよび方向yに直交する方向zに沿って独立して並進可能とされており、検出手段3は、スティック2の方向z並進量をさらに独立して検出可能である。
(もっと読む)
飛翔ロボット操縦装置および飛翔ロボット操縦方法

【課題】本発明が解決しようとする課題は、人間が直接見て操縦することができない場所で用いる飛翔ロボットが周囲の物体に衝突したり、接触したりするのを防ぎ、操縦者が飛翔ロボットの向いている方向を確認しながら操縦できるようにすることである。
【解決手段】
物体近接検知センサおよび/または方位検出センサを飛翔ロボットに取り付け、該物体近接検知センサおよび/または方位検出センサの検出する情報を、該飛翔ロボットの周囲を観察するカメラの画像情報に加えて操縦者側に送り、モニタ画面内に表示する。
(もっと読む)
内視鏡手術操作支援システム
【課題】 内視鏡手術の安全性を向上する。
【解決手段】 本発明の内視鏡手術操作支援システムは、手術器具を操作可能なマニピュレータの可動範囲を表示する内視鏡手術操作支援システムにおいて、前記マニピュレータの駆動領域と前記マニピュレータの一部が接触する可能性のある対象臓器との位置関係を算出する位置検出部31と、前記算出された位置関係に応じた接近又は接触条件を数段階の警告レベルとして設定する処理部321と、前記設定した警告レベルを術者の視覚へ報知する表示部322と、を備える。
(もっと読む)
ロボット制御システム
【解決手段】 ロボットヘッド1aの位置および姿勢を制御するロボット制御システム2であって、操作者が保持する操作ヘッド3と、上記操作ヘッドの位置および姿勢を検出するセンサ4とを備えている。
上記制御手段の姿勢認識部24は、操作ヘッドに設けられた制御スイッチ12が入れられると、該制御スイッチが入れられた際の操作ヘッドの初期姿勢を認識し、併せて操作ヘッドの姿勢の変化による初期姿勢からの変位ベクトルを求める。
姿勢変換部25は、初期姿勢からの変位ベクトルを、所定の基準姿勢に対応する該基準姿勢からの変位ベクトルへと変換し、制御手段は当該基準姿勢からの変位ベクトルにロボットヘッドの姿勢を追従させる。
【効果】 操作者がどのような姿勢で操作ヘッドを保持しても、操作ヘッドの位置および姿勢の変化に対して、ロボットヘッドの位置および姿勢を追従させることができる。
(もっと読む)
マルチアームロボット遠隔手術におけるツール状態および通信のためのインディケータ
医療用および/またはロボットのデバイス、システムおよび方法は、マルチアームの遠隔ロボットまたは遠隔手術システムの各マニプレータアセンブリ(8、10)に関連するインディケータ(20)を提供し得る。例示的なインディケータは、関連する手術器具(28)を動かすマニプレータに取り付けられたマルチカラーの発光ダイオード(LED)(56)を備え、インディケータが任意の種々様々な信号を表示することを可能にする。本発明は、遠隔手術システムおよび/または遠隔手術チームのメンバー(A、O)の間の通信を容易にする追加のユーザインタフェースを提供し得る。  (もっと読む)
(もっと読む)
マスタ・スレーブ式マニピュレータシステム及びその操作入力装置
【課題】マスタ・スレーブ式マニピュレータシステムにおいて、操作入力装置にモータを用いることなく障害物や動作範囲の制限を力覚的に提示することが可能で、信頼性に優れ小型で操作性の良いものとすること。
【解決手段】マスタ・スレーブ式マニピュレータシステムは、アームを有するマニピュレータ110、130と、マニピュレータ130のアームを動かす操作入力装置190と、マニピュレータ110、130及び操作入力装置190を制御するコントローラ145、150とを備える。操作入力装置190はその関節に動力伝達の切断と動力伝達を接続してその動力伝達接続方向を選択可能な動作方向制限切替機構を備える。
(もっと読む)
ロボットガイドカテーテルシステム
【課題】
【解決手段】ロボットガイドカテーテルシステムはマスター入力装置を備えるコントローラを備える。器具操作装置はコントローラと通信し、かつマスター入力装置によって少なくとも部分的に生成される制御信号に応答する複数のガイド器具操作素子を含むガイド器具接続部を有する。細長いガイド器具は、ベース、遠位端、及び挿通用内腔を有し、ガイド器具ベースはガイド器具接続部に操作可能に接続される。ガイド器具は該当するガイド操作素子に操作可能に接続され、かつガイド器具の遠位端に固定される複数のガイド器具制御素子を備える。これらのガイド器具制御素子は、ガイド器具に対して軸方向に移動することができるのでガイド器具遠位端の動きをマスター入力装置によって制御することができる。
(もっと読む)
ロボット操作装置及びロボット
【課題】 操作者の考えまたは感じたことをそのままロボットへ送出することにより、多数のセンサをロボットに装備しておかなくても、操作者が行いたいと考えた動作を瞬時にロボットに行わせることができるロボット操作装置及びロボットを提供する。
【解決手段】 操作者Aは、頭部にブレインキャップ1を被っている。ブレインキャップ1は、脳活動に伴って発生する電場を計測する第1センサ2と、脳血流の状態を検出する第2センサ3とを有する。ロボット10内の脳活動解析部12は、第1センサ2で得られた脳内電場を示す信号と、第2センサ3で得られた脳血流の状態を示す信号とに基づいて、操作者Aの脳活動を解析し、ロボット10は、その解析結果に従った動作を行う。
(もっと読む)
ロボットシステム
【解決手段】ヒューマノイドロボット10は22個の関節を含み、22個の間接によって所定の動作を実行する。或る動作を実行したときにおける22個の間接についての関節角度指令値の時系列変化についての行列を特異値分解し、次元圧縮する。つまり、有効な特異値の数を減らす。これにより、ロボット10の制御情報が削減される。
【効果】次元圧縮するので、簡易なコントローラを用いてロボットの身体動作を簡単に制御することができる。
(もっと読む)
アニマトロニクス制御支持式歩行システム
1形態として、ロボット歩行形象物と、ロボット歩行形象物を少なくとも部分的に支持する車輪付き支持体からなる支持式歩行システムが開示されている。支持式歩行システムは、人間のオペレータによって駆動されそして制御される。上記歩行システムが、種々の速度で駆動しかつ回動する間に、前方へ、後方へ、そして側方へカートの運動と同期してステップを進めるように、コンピュータアルゴリズムがロボットの歩行機能を自動的に制御する。 (もっと読む)
医療用マスター操作装置
【課題】
操作が簡単で格別な熟練度を必要とせず、微小部位の外科手術であっても容易に行うことができるマスタースレーブ方式における医療用マスター操作装置を提供する。
【解決手段】
マスター側の操作装置を操作することによりスレーブ側のエンドエフェクタを作動し、生体組織の部位を診断、処置するマスタースレーブ方式における医療用マスター操作装置であって、両手で操作可能な一対のペン形状の操作装置であるペンマスターをターンテーブル上に設置し、前記操作装置の相対角度を操作者の任意の角度及び位置に選定可能とし、前記操作装置を外装部と内装部とから成る二重構造とし、前記外装部には上下両端に三次元変位センサーを設け、前記内装部には回転センサーを備えた回転操作手段を設け、前記外装部の外周にはセンサースイッチを装着した指先挿入部を設けて医療用マスター操作装置を構成する。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】 携帯用無線端末機に設けられたモーションセンサを用いて何れの場所も問わず便利にサービスロボットを制御することのできるロボット制御システム及びロボット制御方法を提供する。
【解決手段】 本発明に係るロボット制御システムは、インターネットと接続され映像信号及び/または制御信号を送受信する無線共有器と、前記無線共有器から受信された指示に従って自走しつつ指示された作業を行ない無線通信モジュールが設けられたロボットと、モーションセンサを備え、インターネットと接続され前記無線通信モジュールに作業内容を無線送信したり映像信号及び/または制御信号を受信する携帯用無線端末機と、インターネットと接続され前記ロボットの制御画面及び前記ロボットから受信された映像信号及び/または制御信号を前記携帯用無線端末機に出力するロボットサーバとを含む。
(もっと読む)
電気流体力装置用制御ハンドル
本発明は少なくとも1台の電気流体力装置を制御するようにされるマニピュレータ用制御ハンドルに関する。
本発明のハンドルは、内部に空胴(6)を画定するケーシング(5)と;セットポイント信号を供給するのに使用され、ケーシングの空胴内に配置されるジェネレータ手段(8)およびケーシングの表面に配置され、オペレータによって作動されるようにされるカーソル形成手段(9)を備えた少なくとも一つのセットポイントジェネレータとを有している。
本発明によれば、供給されるセットポイント信号の値は、電気流体力装置を制御するためにカーソル形成手段の動きに関係づけられている。
また、ハンドルは、ケーシングの空胴内に組み込まれ、セットポイント信号を、セットポイント信号のパワーより大きいパワーをもつパワー信号に変換する電子パワーボード(15)を有し、上記パワー信号は電気流体力装置に供給される。  (もっと読む)
(もっと読む)
医療用遠隔操作ロボット・システム
遠隔制御ロボットを備えるロボット・システム。ロボットは、カメラ、モニタ、ホロノーム・プラットフォームを備え、すべてハウジングに取り付けられている。ロボットを、カメラとモニタを備える遠隔制御ステーションにより制御することができる。遠隔制御ステーションはロボットに無線で結合されているベース・ステーションにリンクしている。遠隔地にいる介護者は、ロボットを通じてカメラとモニタにより患者を監視し、世話をすることができる。ホロノーム・プラットフォームを使用することにより、ロボットは家庭または施設内を動き回り、患者を特定し、かつ/または患者に追随することができる。 (もっと読む)
ロボット
【課題】 従来、ロボット本体に分離可能に接続される分体部を備えたロボットでは、分体部がロボット本体の制御装置としての機能を有しているにすぎず、ユーザとコミュニケーションを行ったり、心理的なつながり感を得ることができなかった。
【解決手段】 分体部50は、ロボット本体10から分離した状態にあるときにロボット本体10のイメージ画像PをLCDパネル51に表示させる。また、分体部50は、マイク52、カメラ53、操作ボタン55〜57等で入力された情報に基づいてメモリ66が記憶した性格・経験等の状態データを改変すると共に、入力情報及び状態データに応じた音声をマイク54から出力する。
(もっと読む)
食事支援装置
【課題】食物の盛り付け方や照明等の環境条件の変動によらず、利用者の食事が円滑に進むことを支援する。
【解決手段】食物を把持する把持機構部36を備え、容器12を複数の領域に分割し、複数の領域の各々について食物の把持が有効となる可能性を示す有効値を算出し、有効性の予測値に基づいて複数の領域から決定した把持位置に対して把持を行うように把持機構部36を制御することで、容器12に盛り付けられた食物を把持して利用者の口元へ運んで利用者の食事を支援する食事支援装置により上記課題を解決できる。
(もっと読む)
2つの部分から構成される遠隔操作アーム
本発明の遠隔操作アームは主アーム(5)及び従アーム(1)を備え、それら2つのアームは互いに機械的に分離されており、且つ、制御ユニット(7)と、従アームを駆動させるための機械ユニット(8)とを有するインターフェースシステム(6)によって連結されている。本発明によれば、機械ユニット(8)は、固定モータと、従アームの水平部分の管状セグメント(3)を少なくとも完全に1回転させて作業負荷を増大させる伝達装置とを有している。
選択図 図1  (もっと読む)
(もっと読む)
81 - 97 / 97
[ Back to top ]